
Fターム[5J084AA10]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 方位、角度 (208)
Fターム[5J084AA10]に分類される特許
1 - 20 / 208
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
レーザオルソ画像生成装置及びそのプログラム
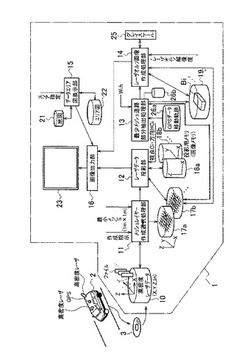
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
熱源位置角度検出方法

【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、反射部31によって反射光が反射される側に配置され、反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
移動物体検出装置、移動物体検出プログラム、移動物体検出方法および飛行物体
【課題】人工衛星や航空機などから撮像して得られる光学画像を用いて移動物体の速度ベクトルを算出できるようにすることを目的とする。
【解決手段】検出装置記憶部290は、移動物体が存在する第一領域と第二領域とを撮像した第一領域画像と第二領域画像とを記憶する。検出装置記憶部290は、第一領域と第二領域との所定のずれ量に相当する画素数をずれ量固定値292として予め記憶する。ずれ量算出部220は、第一領域画像と第二領域画像とに対して相関演算を行って画像のずれ量をずれ量算出値221として算出する。ずれ量訂正部230は、ずれ量算出値221からずれ量固定値292を差し引いてずれ量訂正値231を算出する。速度ベクトル情報生成部240は、ずれ量訂正値231に基づいて移動物体の速度ベクトルを表す速度ベクトル情報241を生成する。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザ光を発生するレーザダイオード10と、レーザダイオード10からレーザ光が発生したときに、検出物体によって反射されるレーザ光の反射光を検出するフォトダイオード20とを備え、さらに、所定の中心軸42aを中心として回動可能に構成された偏向部41を備えるとともに、偏向部41によりレーザ光を空間に向けて偏向させ、且つ反射光をフォトダイオード20に向けて偏向する回動偏向機構40と、回動偏向機構40を回転駆動するモータ50とが設けられている。そして、偏向部41に対するレーザ光の入射方向を相対的に変化させることで、偏向部41からのレーザ光の向きを、中心軸42aの方向に関して変化させる揺動ミラー31と、この揺動ミラー31を制御する制御手段とが設けられている。
(もっと読む)
距離マーカ投射装置及びこれを備えた距離測定装置
【課題】所定距離にマーカを投射し、当該所定距離の位置をユーザに視認させることのできる装置を提供する。
【解決手段】面上に光によるマーカを投射する装置であって、光によるマーカを投射するための光源5と、装置本体からマーカを投射する面上の所定位置までの当該面上における距離を記憶する記憶手段7と、面から装置本体までの高さを距離計の出力に基づいて求める手段4と、装置本体からマーカを投射する面上の所定位置までの面上における距離と面から装置本体までの高さとに基づいて、マーカを面上の所定位置に投射するための光源の光軸の角度を算出する演算手段8と、算出された光軸の角度に基づいて光源の光軸の角度を駆動制御し面上の所定位置にマーカを投射させる手段6とを備えた。
(もっと読む)
レーザレーダ装置
【課題】カバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、フォトダイオード20の受光面20aの前方側且つ下方側にフィルタ部材90が配置され、このフィルタ部材90は、当該フィルタ部材90の下面90aとのなす角度が小さくなる光ほど透過を抑制する角度依存性を有すると共に、透過板80から受光センサ側に向かう斜め方向の外乱光の透過を抑制するように構成されている。また、上記フィルタ部材90は、上下方向の光については透過するように構成されているため、凹面鏡41によって上方に導かれる正規の反射光(外部空間の物体からの反射光)については、フィルタ部材90を透過する際に抑制されにくくなる。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置を、レーザビームの走査面を90°以内で変化可能な構成とし、走査面を一方向に角度45°だけ傾けて距離Laを測定し(S3)、次は走査面を逆方向に90°だけ傾けて距離Lbを測定する(S4,S5)。測定距離La,Lbより地面内の第1基準水平方向に対して傾いている角度θcを算出し(S6)角度θc傾ける(S7)。次に走査面を地面と直角にして(S8)距離Ld1,Ld2を夫々測定し(S10,S11)、その測定結果よりレーザビームが基準角度0°にある状態で第2基準水平方向と平行になるまでの角度差θxを算出すると(S12)、本体を地面の方向に角度差θxだけ傾けて走査面を90°回転させる(S14)。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置11に、本体11aが壁面3に設置された状態で、レーザビームの走査面を90°変化可能なものを使用し、レーザビームの走査面を地面2と直角にした状態で、2つの走査角度θ1,θ2について地面までの距離l1,l2をそれぞれ測定し、その測定結果に基づいて、レーザビームが基準角度0°にある状態で、地面2と平行になるまでの角度差θxを算出する。そして、レーザレーダ装置11の本体11aを地面2の方向に角度差θxだけ傾けて、レーザビームの走査面を90°回転させる。
(もっと読む)
無線タグリーダおよび監視システム
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
レーザレーダシステム,及び取付方法
【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザダイオード10と、フォトダイオード20とを有し、所定の中心軸42aを中心として回動可能に構成された偏向部41を備えるとともに、偏向部41によりレーザ光を空間に向けて偏向させ、且つ反射光をフォトダイオード20に向けて偏向する回動偏向機構40と、回動偏向機構40を回転駆動するモータ50とを備えている。さらに、レーザダイオード10を回転させるモータ70とこのモータ70を制御する制御回路80とを備え、モータ70によりレーザダイオード10を回転させることで、偏向部41に入射するレーザ光の入射方向を変化させ、偏向部41からのレーザ光の向きを、中心軸42aの方向に関して変化させるようにしている。
(もっと読む)
光学式測定装置
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
交通流計測システム
【課題】
レーザセンサを用いて、測距データから走行車線上の車両の速度と測距された車両の交通流を計測する。
【解決手段】
路面より垂直方向に複数のレイヤを形成する複数のレーザビームを照射し、対象物から、距離データとエコーデータを含む測距データを取得する、複数のレイヤに対応した複数の測距部と、各測距部に対応して、測距部で取得された測距データから車両の位置を検知する検知部と、各測距部により取得された、レイヤ対応の距離データとエコーデータを統合処理して共通の三次元のデータに変換し、かつ共通する距離データから車両の速度を演算するデータ処理部と、検知部で検知された車両に関するデータを表示する表示部を有する。データ処理部は、三次元座標データを用いて同一車両かを判断し、同一車両と判断した場合、車両に同一の固有IDを付与し、同一と判断された車両の速度データ、距離データを同一の固有IDに対応付けてポイントデータDBに記憶する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
1 - 20 / 208
[ Back to top ]