
Fターム[5J084AA20]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | その他 (12)
Fターム[5J084AA20]に分類される特許
1 - 12 / 12
植生検出装置及び植生検出方法
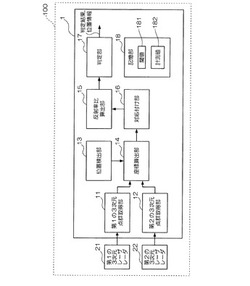
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
レーザ密度分布推定装置、レーザ密度分布推定方法、及びプログラム

【課題】森林域の地形の航空レーザ計測において、地表へ到達するレーザの密度が樹木密集度や地表の傾斜に応じて受ける影響を評価する。
【解決手段】林分収穫表に示される樹木の属性(樹種・樹齢)別の標準密度に基づいて、樹間距離を推定する(S64)。レーザの地表への到達率をシミュレーションし、樹木からの距離に応じた到達率関数を属性別に求める。樹間距離と到達率関数とから各属性の植生域の樹木一本当たりのセル内のレーザ到達率を求める(S66)。森林計画図から林班等の属性を取得し、対応する属性のセル内レーザ到達率に基づいて、当該林班等における到達レーザ密度を定める(S68)。また、標高データ48から傾斜区分図50を生成し(S72)、到達レーザ密度に対して傾斜補正を行う(S70)。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
レーザレーダ装置
【課題】CW変調信号で強度変調されたレーザ光信号を送受して距離計測を行うとともに、先見情報を利用して1周期ごとの不確定性を除去することにより、正確な距離を検出可能なレーザレーダ装置を得る。
【解決手段】GPS10と、INS11と、地図情報保存部12と、光源1と、光源1からのレーザ光信号に対してCW変調信号により強度変調をかける光強度変調器2と、強度変調されたレーザ光信号30aをターゲット30に向けて送信するとともに、ターゲット30からの散乱光信号30bを受信する送信光学系5および受信光学系6と、散乱光信号30bを強度検波して電気信号に変換する光受信機7と、CW変調信号と受信信号との位相差Δφを検出する位相検波器8と、位相差Δφと先見情報とに基づいて、ターゲット30までの距離Lを検出する距離検出器9とを備えている。
(もっと読む)
レーザレーダ装置
【課題】音響光学素子からなる光変調部を用いたコヒーレントレーザレーダ装置では、単純な構成で十分なON/OFF消光比と時間変動のない安定した偏光状態の変調光を出力する光変調部を得ることが困難であった。
【解決手段】レーザレーダ装置に使用される光変調部3は、入出力光分離手段31と、音響光学素子324からなる光変調手段32と、基準光源1の出力レーザ光に対しほぼ全反射となる光全反射手段33とからなり、光変調手段は入出力光分離手段からの入力光と光全反射手段からの反射光が通過して2回変調されるように構成され、光全反射手段は出射光の偏光面が入射光の偏光面に対し直交回転している偏光面回転機能を有するようにして、十分なON/OFF消光比と時間変動のない安定した偏光状態の変調光が得られるようにした。
(もっと読む)
動作追跡装置および方法
【課題】 本発明は動作追跡装置および方法に関するものであって、入射された映像に基づいてレーザを照射するために映像の入射軸とレーザの照射軸を同期化させ、照射されたレーザを利用して被写体の動作を追跡する動作追跡装置および方法を提供する。
【解決手段】 本発明の実施形態による動作追跡装置は入射された光の一定量は反射させ残りは透過させる半透過鏡と、前記半透過鏡に反射され入射された映像の入力を受ける映像入力部と、前記入力された映像内に含まれた第1被写体の位置を確認する位置確認部および前記確認された位置を参照して前記半透過鏡と前記第1被写体をつなぐ軸上から前記第1被写体に前記半透過鏡を透過するレーザを照射し前記第1被写体を追跡する目標物追跡部を含む。
(もっと読む)
レーザ測量装置及びレーザ測量方法
【課題】 飛行体に搭載されるレーザ測量装置において、地上局への測量データの提供のリアルタイム性を実現する。
【解決手段】 レーザ計測部は、飛行体が直線飛行航路32を飛行している計測期間においてレーザ計測データを順次出力する。送信部は、直線飛行航路32上にて、レーザ計測データが規定のファイルサイズに達すると、随時、圧縮処理を行い、レーザ計測データを地上局へ伝送する。直線飛行航路32上では、GPS/IMUが取得する飛行状態データは地上局へは伝送されず、飛行体が飛行する旋回航路34上に位置する計測中断期間に、送信部は飛行状態データを地上局へ伝送する。
(もっと読む)
通過人数検出装置及び方法
【課題】 駅構内の通路や横断歩道のように比較的広い範囲を通過する人数を正確に計測することを目的とする。
【解決手段】 監視領域にレーザ光を走査状に照射すると共に該レーザ光の反射光を検出することにより、前記監視領域の各位置における距離情報を取得するレーザセンサと、前記各位置における距離情報に基づいて監視領域に存在する通行人の人数を判定し、さらに所定時間内における前記人数の累計を算出し、当該累計を前記監視領域を通過する通行人1人当たりの延べ人数で除算することにより前記所定時間内における通過人数を判定する通過人数判定手段とを備え、該通過人数判定手段は、前記監視領域を通過する通行人の歩行速度の変化に基づいて前記通過人数を補正する。
(もっと読む)
車両用駐車支援装置
周囲に関するデータを車両の外部範囲に記録する工程と;特定領域の大きさを該周囲に関する記録されたデータを使用して計算する工程と;前記特定の領域が、計算された大きさと予め公知の車両固有参照値とを使用することで駐車スペースとして適切かどうかに関する評価を行う工程とからなる車両の駐車支援法が開示されている。この発明によれば、周囲に関するデータの記録は、3D光学システムによる周囲の3次元画像の記録を含む。  (もっと読む)
(もっと読む)
追尾照準装置
【課題】本発明は、3軸ジンバル構造を採用して天頂ロックを確実に回避することを前提として、装置の大型化を抑制するとともに、光軸調整の簡素化を図って調整誤差の減少化を得られ、追尾照準精度の向上化を図れる追尾照準装置を提供する。
【解決手段】被取付け体に取付け固定される装置ベース1と、この装置ベースに回転自在に支持されるジンバル部2との組み合せからなり、内部に、レーザ発生器7と、照明光学系8と、画像センサ14および、3軸ジンバル構造のクーデ光学系10を収容し、移動する目標物を追尾して画像を取り込み、かつレーザ光の照準を合わせて目標物を照射する追尾照準装置において、装置ベースに、レーザ発生器と、画像センサを配置するとともに、画像センサの光軸と、レーザ発生器から発振されるレーザ光の光軸とを、クーデ光学系における1軸の調整で一致させる光軸調整機構20を具備する。
(もっと読む)
光子検知子モジュールと像映装置。
【課題】
レンジ解像度を達成するのに必要な回路速度と密度、レーザーエコーにおけるピコ秒の飛走相違に基づいた小さなターゲット表面変動を明示するのに必要な感度とを具えたレーダー像映システムを提供する。
【解決手段】
ターゲットからの光子反射を発生する光子源と、光子反射に反応して検知子アレイ出力信号を生成する検知子アレイと、検知子アレイ出力信号を受信する積層処理モジュールとを有してなり、処理モジュールが少なくとも2個の積層を有し、各積層が受信検知子アレイ出力信号処理のための少なくとも1個の集積回路チップを有している。
(もっと読む)
1 - 12 / 12
[ Back to top ]