
Fターム[5J084AB17]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | その他の物体 (92)
Fターム[5J084AB17]に分類される特許
1 - 20 / 92
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
無線タグリーダおよび監視システム
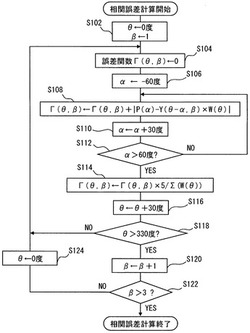
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
距離測定装置およびそれを備えた輸送機器

【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
車両のレーザーレーダーユニット
【課題】レーザー光の透過損失の抑制と部品点数の削減を図ることのできる車両のレーザーレーダーユニットを提供する。
【解決手段】発光部10と受光部11を含むユニット本体13を、ヘッドライト5のハウジング7の内部に設置する。ハウジング7の前方を覆うカバーガラス9に、発光レンズ16と受光レンズ17を一体に形成する。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
形質計測装置及び形質計測システム
【課題】映像情報を用いることなく、形状データに基づくルゴシティを得ることで、水中の形質を簡単に把握することができる形質計測装置を提供する。
【解決手段】レーザ発振器15によって水中の測定領域に向けてレーザ光を射出する。光センサ19によって測定領域に照射されたレーザ光の散乱光を反射光として検出する。演算用PC11によって反射光に基づいて測定領域の形状データを計測し、計測した形状データに基づいて、測定領域の面積と表面積との関係をルゴシティとして算出し、算出したルゴシティに基づいて測定領域の形質を判定する。
(もっと読む)
反射型光電センサ
【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
物体検出装置
【課題】光学窓の汚れを検出するための受光素子を設けることなく、光学窓の汚れを検出できるようにする。
【解決手段】鉛直下方向を含む面内を走査するようにレーザー光の向きを変化させて光学窓を介して照射するとともに、レーザー光が物体に反射した反射光を光学窓を介して受光するレーザーセンサ10を備え、レーザー光の照射方向を鉛直下方向に変化させて、路面に反射した反射光が検出されたか否かに基づいて光学窓の汚れを判定する(S202〜S216)。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
搬送車両および運転支援装置
【課題】パレットに対して搬送車両を進行させるべき方向を運転者が容易に認識できる搬送車両および運転支援装置を提供すること。
【解決手段】周囲状況画面では、搬送車両1の周囲状況として、第1レーダレーダ5A(又は、第2レーダレーダ5B)の走査により障害物が検出されなかった障害物非検出エリアAと、障害物の影となって測定が行えない検知不可能エリアBとが、それぞれ異なる表示態様で表示される。例えば、障害物非検出エリアAと、検知不可能エリアBとが、運転者が区別可能に、別々の色で表示される。これにより、搬送車両1がパレット100の架台部100aの下に進入する場合に、搬送車両1をパレット100の架台部100aの下に進入させることが可能な進入経路を、運転者が容易に見いだすことができるので、パレット100に対して搬送車両1を進行させるべき方向を運転者が容易に認識できる。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から、判定期間中の入力信号に含まれるノイズの度数分布を幾何分布と仮定した分布を求め、求めた分布とランレングス測定部101の測定結果から得られるランレングスの分布とを比較することにより、入力信号が有効か否かを判定する判定手段(確率算出部103、ノイズ度数算出部104、有効性判定部105)とを備える。
(もっと読む)
捜索セット
【課題】載置場所を円滑に探し出すことができる捜索セットを提供すること。
【解決手段】本発明では、使用者が捜索具を用いて載置場所を捜し出すための捜索セットにおいて、発信部と受信部とを有する捜索具と、発信部と受信部と制御部とを収容したケーシングとからなり、ケーシングは、捜索具から発せられた信号を受信する受信部と、捜索具から発せられた信号よりも到達距離が短い微弱な信号を発信する発信部と、受信部で信号を受信した場合に発信部から所定の信号を発信するように制御する制御部とを収容し、捜索具は、所定の信号を発信する発信部と、ケーシングに収容した発信部から発せられた信号を受信する受信部と、受信部で信号を受信した場合に報知をする報知部とを有することにした。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
光学式検出装置、表示装置及び電子機器
【課題】広い範囲での対象物の位置検出が可能な光学式検出装置、表示装置及び電子機器等の提供。
【解決手段】光学式検出装置は、照射方向に応じて強度が異なる第1の照射光を放射状に出射する第1の照射ユニットEU1と、照射方向に応じて強度が異なる第2の照射光を放射状に出射する第2の照射ユニットEU2と、第1の照射ユニットEU1からの第1の照射光が対象物に反射されることによる第1の反射光と、第2の照射ユニットEU2からの第2の照射光が対象物に反射されることによる第2の反射光を受光する受光部RUと、受光部RUでの受光結果に基づいて、対象物の位置を検出する検出部50を含む。
(もっと読む)
物体認識装置、及びプログラム
【課題】物体認識装置において、複数個の検出対象が走査方向に沿って近接している場合であっても、各検出対象の認識精度を向上させること
【解決手段】物体認識処理では、測距データ間の差が予め規定された許容値以下となる測距データによって形成される領域に含まれる測距データ群を、一つの候補領域をグループ化する(S130)。当該候補領域の大きさが規定値より大きければ(S150:YES)、当該候補領域を特別候補領域として、この特別候補領域に対応する画像データ上の対象領域に対して画像認識処理を実行し、対象領域中の検出対象の範囲を特定する(S170)。その特定した範囲に基づく検出対象の境界方位に従って、特別候補領域を分割し(S210)、その分割した新たな候補領域を含む全ての候補領域について追跡処理を実行して、候補領域の中で物体として確定すべきものと特定する(S230)。
(もっと読む)
障害物検知装置及び障害物検知方法
【課題】電線のような細い障害物であっても、これを適切に検知し、その高さから障害物と移動体の衝突可能性を判定する。
【解決手段】光源11、12はそれぞれ点光源であり、鉛直方向に対して傾いた角度をなす面状に発散する照射光111、121をそれぞれ発する。障害物100が線状であれば、この光って見える箇所は、照射光111のなす面と障害物100との交点、照射光121のなす面と障害物100との交点の2箇所であり、どちらの箇所も点状であるため、これらは輝点として見える。撮像部20は、少なくとも2つの輝点が視野に入り、これらが認識できるように設定される。これらを撮像した2次元画像中における2つの輝点の位置及びこれらの間の間隔から、制御部30は、光源11、12から障害物100の高さを算出し、移動体の最大高さとの関係から障害物100と移動体との衝突可能性を判定する。
(もっと読む)
1 - 20 / 92
[ Back to top ]