
Fターム[5J084AC01]の内容
光レーダ方式及びその細部 (24,468) | 装置の設置形態 (779) | 移動体に設置するもの (563)
Fターム[5J084AC01]の下位に属するFターム
Fターム[5J084AC01]に分類される特許
1 - 18 / 18
地中変位測定装置
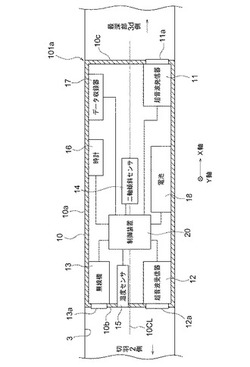
【課題】測定範囲の制限を受けることなく地中の土の変位を測定することを可能にする地中変位測定装置を提供することを課題とする。
【解決手段】地中変位測定装置101は、ボアホール3内に互いに間隔をあけて設置される複数のセンサ装置101aを備える。センサ装置101aは、超音波を発信する超音波発信器11と、超音波を検知する超音波受信器12と、制御装置20とを有している。さらに、センサ装置101aの制御装置20は、センサ装置101a及び別のセンサ装置101aの間で別のセンサ装置101aの超音波発信器11が超音波を発信してからセンサ装置101aの超音波受信器12が超音波を検知するまでの伝播時間を検出する伝播時間検出手段として作用し、検出した超音波の伝播時間及び超音波の伝播速度に基づき別のセンサ装置101aに対するセンサ装置101aの変位を算出する変位算出手段として作用する。
(もっと読む)
自律移動システム、その制御方法及びプログラム

【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
空間計測システム及び計測方法、並びに昇降機制御システム
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
移動体の距離測定装置
【課題】距離測定中に、距離測定装置を搭載した移動体と、その移動体周囲の物体(被測定物)との距離が時々刻々変化する事態が発生しても、周囲物体までの距離をより安定的に測定可能とする。
【解決手段】車両MMの外方に向けて、上下方向に幅を有して横方向に延在した発光領域を有するパルス光を時間変調させて投光すると共に、予め設定した撮像領域内に位置する上記投光したパルス光を撮像し、撮像した画像から同期検波により上記パルス光を抽出する。そして、抽出したパルス光上端のエッジ部を検出して、その検出したエッジ部と車両MMとの距離を算出する。
(もっと読む)
レーザ距離測定装置
【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
カラー式対象物表示システム
【課題】周囲の対象物をカラー画像として表示可能であり、しかも対象物までの距離が所定の距離より近いことを瞬時に認識できるように表示できるカラー式対象物表示システムを得る。
【解決手段】R画素、G画素、及び、B画素を有するカラー式CMOSセンサ19と、CMOSセンサが受光した赤外光に基づいて対象物までの距離が設定距離範囲にあるかを判定する距離判定手段22と、R画素、G画素、及び、B画素の電気信号に基づくカラー画像と、距離判定手段の判定結果に基づく判定結果画像とを交互に生成する画像処理手段23と、時間残像現象が生じ得る時間間隔でカラー画像と判定結果画像を交互に表示するモニタ24と、を備える。
(もっと読む)
車両検出装置
【課題】本発明は、画像から車両の情報を高精度に検出する車両検出装置を提供することを課題とする。
【解決手段】撮像手段4で撮像した画像から車両の情報を検出する車両検出装置1であって、車両の面の候補を推定する面候補推定手段11と、車両を撮像した画像から所定の特徴量を有する複数の特徴点を抽出する特徴点抽出手段12と、抽出した特徴点の3次元位置を推定する3次元位置推定手段13と、異なる時刻で撮像した各画像からそれぞれ推定された面候補の組み合わせ毎に、面候補間で複数の特徴点について特徴量の差が小さくなる特徴点の対応関係を探索し、当該探索された対応関係の複数の特徴点間において3次元位置を並進移動及び回転変換した上で位置誤差を求め、当該位置誤差が最少となる組み合わせの面候補を抽出し、当該抽出した組み合わせの面候補に基づいて車両の面を検出する車両情報検出手段14とを備えることを特徴とする。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、投光器5は、点灯個数を変更自在な複数の近赤外線LED5aを備え、タイミングコントローラ9は、ターゲット距離に基づいて、投光器5の近赤外線LED5aの点灯個数を変更させた。
(もっと読む)
レーダー装置
【課題】レーザーレーダ装置は、観測対象領域に対しビーム方向を走査し計測を行うが、高いSNRが取れず誤検出等による画像劣化補償に画像の平滑化を行うメディアン手法を用いるので、目標物の細かい形状復元が難しい。
【解決手段】アレー状に配置された放出・検出素子からのレーザービームをビーム走査部でビームの向きを往復走査して空間へ放射し、目標物で反射されたレーザービームを放出・検出素子で検出して目標物までの距離を計測するレーダー装置であって、異なるビーム走査によって得られる複数の画像データを画像格納部に格納し、目標物までの距離の基準値を基準値設定部で設定し、同じ領域を異なるビーム走査により観測して得られる複数のデータと上記基準値をデータ比較部で比較して、その比較結果からデータ決定部で決定・出力した画像データを出力格納部に格納する。
(もっと読む)
光走査装置、レーザレーダ装置、及び光走査方法
【課題】レンズを交換することなく、光走査の走査角を可変する。
【解決手段】可変焦点レンズ16は、レーザ光源18側に設けられた、焦点距離(f1)が変更可能な第1の液体レンズ26と、レーザ光源18と反対側に設けられ、かつ第1の液体レンズ26と所定の間隔(L)を隔てて設けられた、焦点距離(f2)が変更可能な第2の液体レンズ28との2枚の液体レンズで構成されている。
可変焦点レンズ16のレーザ光源18側の焦点距離(s)、及びレーザ光源18と反対側の焦点距離(f)は、第1の液体レンズ26の焦点距離(f1)、及び第2の液体レンズ28の焦点距離(f2)を変更することによって制御される。
(もっと読む)
裏面照射型撮像素子及び距離測定装置
【課題】距離算出時間を短縮することが可能な裏面照射型撮像素子を提供
【解決手段】一定周期で強度変調された照射光による対象物8からの反射光をp基板24の裏面側から受光し、反射光に応じてp基板24内の複数の光電変換部で発生して蓄積された電荷をp基板24の表面側から読み出して撮像を行う裏面照射型撮像素子であって、1つの光電変換部に対応して4つ設けられ、対応する光電変換部で発生して蓄積された電荷を一時的に蓄積するための電荷蓄積部15a〜15dと、p基板24の表面上方に設けられ、1つの光電変換部に対応する電荷蓄積部15a〜15dの各々に、該光電変換部に蓄積される電荷のうち反射光の該各々に対応する位相における光に応じた電荷を蓄積させる制御を行う電極20と、p基板24の表面上方に設けられ裏面照射型撮像素子が形成されたチップとは別のチップと電荷蓄積部15a〜15dとを接続するためのチップ間接続用電極21とを備える。
(もっと読む)
レーザースキャナのキャリブレーション装置及びキャリブレーション方法
【課題】特殊な機器を使用することなくレーザースキャナのキャリブレーションを行う技術を提供する。
【解決手段】左右両側辺が平行かつ垂直な垂直平面S1を有するターゲットを、垂直平面S1の前方の計測原点Omからレーザースキャナ1により水平走査し、M個の測点に対する点群データを得る。有効測点抽出部13は、この点群データの中から、垂直平面S1の左右両側の端部の端測点A,Bを特定し、端測点A,B間のm個の有効測点Piの相対座標を抽出する。座標決定手段14は、光軸の軌跡が垂直平面S1を切る線(走査線E1E2)を基準に測地座標系を設定し、端点E1から端測点Aまでの距離dA、端点E2から端測点Bまでの距離dB、及び端測点A,B以外の各有効測点Piから走査線E1E2までの距離diの自乗和が最小となるように、相対座標を前記測地座標へ関係づける関係パラメータを決定する。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
光レーダ装置
【課題】測定対象物が移動体である場合であれ、該移動体への追従性の低下を抑えながら、分解能を向上させることができる光レーダ装置を提供すること。
【解決手段】光レーダ装置の制御回路は、レーザ光源から出射されるパルス光の照射周波数fを、一走査周期当たりの照射パルス数が自然数にならないように設定する。このため、連続する走査周期Tの間で各走査周期Tにおけるパルス光の出射タイミングに、パルス光の照射周期tよりも短い時間Δt(本実施の形態ではΔt=t・1/2)分のずれが生じる。したがって、先の走査における隣り合うパルス光の照射位置p0〜p6の間に、その走査に連続する次の走査におけるパルス光の照射位置p0’〜p6’が設定され、分解能が擬似的に向上する。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
三次元センサを用いるエレベータエリアの監視
本発明は、三次元画像情報を取得するための3D半導体センサ79を用いて、エレベータエリアを監視するための装置に関する。半導体センサ79は、監視されるべきエレベータエリアが、光源によって照光される領域に配置されるようにして取り付けられる光源と、反射光を受光するようにして取り付けられるセンサ群と、電気的信号を画像情報に変換するための処理チップとを備えている。装置には、三次元画像情報を供給するために半導体センサ79に接続されている処理ユニット80も設けられている。処理ユニット80は、監視されるべきエレベータエリアの状態をあらわす状態情報を得るために、画像情報を処理する。 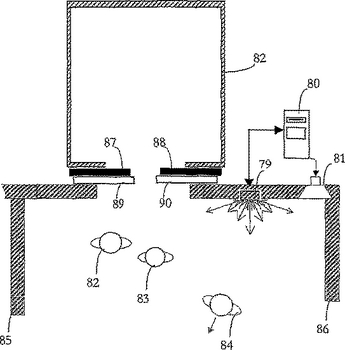 (もっと読む)
(もっと読む)
レーザー光利用接近検知システム
【課題】 クレーン等の重機が送電線に対して接近したことを検知する新規なレーザー光利用接近検知システムを提供すること
【解決手段】 クレーンの移動するブームの先端部に配置され、送電線の相対的な動きに追従するCCDカメラと、前記CCDカメラに連動して照射方向を変更するレーザー距離計と、前記レーザー距離計に適当なインターフェイスによって接続されたコンピュータとを備え、前記レーザー距離計は、前記送電線までの距離を測定する。
(もっと読む)
1 - 18 / 18
[ Back to top ]