
Fターム[5J084AC07]の内容
光レーダ方式及びその細部 (24,468) | 装置の設置形態 (779) | ロボット、機械に設置するもの (126)
Fターム[5J084AC07]に分類される特許
1 - 20 / 126
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
距離計測方法および装置とそれを搭載した形状計測装置
無人走行体を用いた環境情報の取得システム
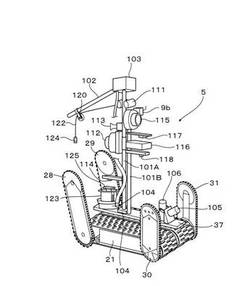
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
自己位置推定装置、方法、及びプログラム

【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
障害物感知装置及びそれを備えたロボット掃除機
【課題】円錐形ミラーを使用して均一なライン光を形成することによって、全方向に対する障害物の感知が可能な障害物感知装置及びそれを備えるロボット掃除機を提供すること。
【解決手段】障害物感知装置は、発光部、前記発光部を駆動させるための発光駆動部、及び前記発光部の光照射方向に、その頂点が前記発光部に向かうように配置され、前記発光部から発生された光を全方向に照射されるライン光に変換する第1円錐形ミラーを有するライン光発信部と;前記第1円錐形ミラーから照射された後、障害物に反射されて戻ってくる反射光を集光する第2円錐形ミラー、前記第2円錐形ミラーの頂点から所定の距離だけ離間するように配置され、前記反射光を通過させるレンズ、前記レンズを通過した反射光を撮像する撮像部、及び画像処理部を含む反射光受信部と;障害物感知制御部と;を含む。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
侵入検出装置及びロボットシステム
【課題】撮像部によって上方から撮像して侵入物を検出する場合、検出範囲の形が円錐形となり、検出範囲がそれだけ狭くなってしまう問題が生じる。
【解決手段】作業が行われる領域を含む作業面1と、作業面1に設けられた識別領域3と、識別領域3に対向する位置に設けられた反射鏡4と、反射鏡4を介して識別領域3を撮像する撮像部5と、撮像された識別領域3の画像に基づいて、識別領域3に侵入した侵入物を検出する侵入物検出部と、を有する。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
反射型光電センサ
【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
指示位置検出装置
【課題】使用環境の制約が少なく、簡易な構成の指示位置検出装置により、安価に精度良く入力操作を検出する。
【解決手段】本発明は、入力面上での操作者による指示位置を、距離センサを用いた検出装置で検出する。指示位置は、光飛行型距離センサが算出した、検出装置から認識対象物までの距離値と、各距離値を得た素子位置とにより特定する。光飛行型距離センサには、電荷振分け型の撮像素子を用い、高周波成分のみ抽出し、距離値を算出する。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】ロボットや車両等の移動物体に搭載しても途切れることなく常に距離を計測することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置は、搭載された移動物体の移動方向に投光パターンを照射する投光部2と、投光パターンが照射された方向の画像を撮像する撮像部3と、撮像部3で撮像された画像から計測対象物に照射された投光パターンのドットを抽出する照射光抽出部4と、照射光抽出部4で抽出された投光パターンの照射方位を算出する照射方位算出部5と、照射方位と撮像部3の撮像方向と投光部2と撮像部3との間の距離とを用いて幾何学的関係から計測対象物までの距離を計測する距離計測部6とを備えており、投光パターンは、移動物体の移動方向にある消失点から放射される直線上に複数のドットを配置した構成になっていることを特徴とする。
(もっと読む)
レーザ距離測定装置
【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
1 - 20 / 126
[ Back to top ]