
Fターム[5J084AD03]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 反射光のレベル検出 (111)
Fターム[5J084AD03]に分類される特許
1 - 20 / 111
光3次元カメラ
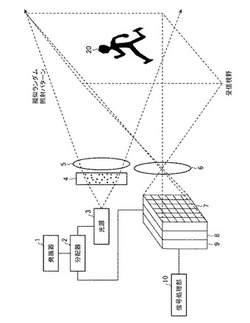
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
雲の含水率を決定する方法

【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
環境認識装置および環境認識方法
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検出する場合、樹木などの低反射物体が自車の進行方向に対して横方向から移動したと誤判断することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向(X軸方向)の物体を検出し(S10)、検出された物体が複数あるとき、複数の物体をグルーピングして物体群と認識し(S12)、認識された物体群内の物体同士の距離の合計値σpxが第1の所定値Lpxを超えるか否か判定し(S18)、時刻tから時刻t-nまでの間における1ステップごとの物体群のX軸方向の位置の差の合計値σpが第2の所定値Lpを超えるか否か判定し(S22)、1ステップごとの物体群のY軸方向の幅の合計値σwが第3の所定値Lwを超えるか否か判定し(S26)、少なくとも2つの判定結果が肯定されるとき(S30)、物体群が静止状態にあると判定する(S32)。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
双方向型物体検知センサ
【課題】 双方向で投受光することが可能な双方向型物体検知センサ、同一構造で互換性のある双方向型物体検知センサ、受光信号を同一投受光装置内や別の投受光装置における投光信号に加えることが可能な双方向型物体検知センサの提供。
【解決手段】 少なくとも投光器と受光器と投光制御部と受光制御部を有する単位投受光器が、対向してまたは並行に複数配置された1組の投受光装置であって、一方の単位投受光器の投光光は他方の単位投受光器により受光され、当該他方の単位投受光器の投光光は前記一方の単位投受光器により受光され、かつ、前記各単位投受光器における投光器の向きと受光器の向きが同一である双方向型物体検知センサを提供する。
(もっと読む)
反射型光電センサ
【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
位置検出システム及び投射型表示システム
【課題】複数の検出対象物の位置をそれぞれ検出することができる光学式の位置検出システムを提供する。
【解決手段】光学式の位置検出システム1000は、第1検出対象物31と第2検出対象物32とに向けて光を射出する光射出部20と、波長の異なる第1検出対象物31からの第1反射光41を受光する第1受光部51と第2検出対象物32からの第2反射光42を受光する第2受光部52を有し、前記第1検出対象物31は前記第1反射光41を反射する第1反射フィルター61を有し、前記第2検出対象物32は前記第2反射光42を反射する第2反射フィルター62を有する。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
物体検出装置及びこれを備えた車両衝突回避システム
【課題】検出対象物の誤検出が発生しにくい物体検出装置を提供することを課題とする。
【解決手段】探査レーザー光源から照射されるレーザー光を偏向器により走査し、その走査範囲からの反射光の強度に基づいて当該走査範囲内に存在する障害物を検出する物体検出処理を行う。物体検出処理では、走査範囲全域にレーザー光を走査して障害物の一次検出を行い、障害物を一次検出した場合には、障害物の検出箇所を含む所定範囲に走査範囲を限定して再びレーザー光を走査し、これにより検出した反射光の強度に基づいて障害物の2次検出を行う。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
物体検知センサ
【課題】発光素子を発光させたときの受光量と、発光素子を発光させないときの受光量とを対比して物体の有無を検知する物体検知センサにおいて、蛍光灯等の周期的に変化する外乱光による誤検知を防止する。
【解決手段】発光素子1、受光素子2、及び発光素子を発光させたときの受光量Aと発光素子を発光させないときの受光量Bとを比較して物体の検知を判定する判定手段3を有する物体検知センサにおいて、受光量Aを計測する時間の長さT1と受光量Bを計測する時間の長さT1を等しくすると共に、該時間の長さT1を商用電源の半周期の整数倍とする。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
1 - 20 / 111
[ Back to top ]