
Fターム[5J084AD05]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 映像、画像 (198)
Fターム[5J084AD05]に分類される特許
1 - 20 / 198
無人走行体を用いた環境情報の取得システム
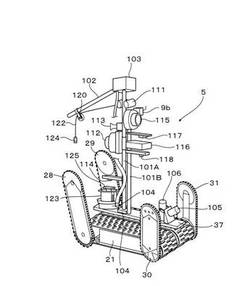
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
シーン内の対象物を3D再構成するための方法

【課題】シーン内の対象物を3D再構成するための方法を提供する。
【解決手段】ステップ1)検知された信号から、その後方散乱の強度がそれぞれ割り当てられる3Dポイントを生成し、更に3Dポイントが、再構成されたデータのセットAを形成するステップ。ステップ2)Aから開始して、対象物を含む空間内にそのポイントが配置されたデータのセットBを、空間特性F2に応じて抽出するステップ。ステップ3)Bから開始して、データのセットCを、抽出基準に応じて抽出するステップ。ステップ4)Cに基づいて、3次元表面を生成して対象物の完成データのセットDを得ることにより、喪失部分をもつ領域を埋めるステップ。ステップ5)Dに基づいて対象物を識別するステップ。ステップ5)の識別に成功しなかったとき、ステップ3)、4)および5)を新規の基準F1で繰り返す。
(もっと読む)
移動物体検出装置、移動物体検出プログラム、移動物体検出方法および飛行物体
【課題】人工衛星や航空機などから撮像して得られる光学画像を用いて移動物体の速度ベクトルを算出できるようにすることを目的とする。
【解決手段】検出装置記憶部290は、移動物体が存在する第一領域と第二領域とを撮像した第一領域画像と第二領域画像とを記憶する。検出装置記憶部290は、第一領域と第二領域との所定のずれ量に相当する画素数をずれ量固定値292として予め記憶する。ずれ量算出部220は、第一領域画像と第二領域画像とに対して相関演算を行って画像のずれ量をずれ量算出値221として算出する。ずれ量訂正部230は、ずれ量算出値221からずれ量固定値292を差し引いてずれ量訂正値231を算出する。速度ベクトル情報生成部240は、ずれ量訂正値231に基づいて移動物体の速度ベクトルを表す速度ベクトル情報241を生成する。
(もっと読む)
障害物感知装置及びそれを備えたロボット掃除機
【課題】円錐形ミラーを使用して均一なライン光を形成することによって、全方向に対する障害物の感知が可能な障害物感知装置及びそれを備えるロボット掃除機を提供すること。
【解決手段】障害物感知装置は、発光部、前記発光部を駆動させるための発光駆動部、及び前記発光部の光照射方向に、その頂点が前記発光部に向かうように配置され、前記発光部から発生された光を全方向に照射されるライン光に変換する第1円錐形ミラーを有するライン光発信部と;前記第1円錐形ミラーから照射された後、障害物に反射されて戻ってくる反射光を集光する第2円錐形ミラー、前記第2円錐形ミラーの頂点から所定の距離だけ離間するように配置され、前記反射光を通過させるレンズ、前記レンズを通過した反射光を撮像する撮像部、及び画像処理部を含む反射光受信部と;障害物感知制御部と;を含む。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
光学装置
【課題】光路上に配置した複数のミラーのうち角度ズレを生じたミラーを容易に特定できる光学装置を提供することを課題とする。
【解決手段】実施形態に係る光学装置は、光路上に配置した複数のミラーと、各ミラーを保持した複数のミラーホルダーと、各ミラーホルダーに設けられた反射面と、を有する。各反射面は、光路と直交する面に沿って各ミラーホルダーに取り付けられている。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
レーザー監視システム
【課題】入港する船舶を検査するためのレーザー監視システムによる方法及びシステムの提供。
【解決手段】レーザー監視システムは、概して水位線150以下に配置された筐体と筐体内に配置されたレーザー及び検出器機構110を含む。この機構はレーザー源とセンサーを含む。レーザー源は、検査対象となっている船舶100に向けてレーザービーム220を発射するように構成されている。センサーはレーザービームの反射光を受信するように構成されている。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
環境認識装置および環境認識方法
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
状態判定装置、状態判定方法およびプログラム
【課題】監視エリアの様々な状態を容易に確認可能とする。
【解決手段】不特定多数の人(移動体)が往来する環境下での、通常状態での人の移動速度VRおよび移動方向θRを予め求めておく。そして、当該環境下で、人の移動速度Vおよび移動方向θを求め、これら移動速度Vおよび移動方向θと、通常状態において予め求めた移動速度VRおよび移動方向θRとを比較し、比較結果に基づき当該環境の状態が異常状態であるか否かを判定する。
(もっと読む)
レーザスキャナ及び動体検知方法
【課題】3次元データ内への動体の測定データの混入防止を自動で行うことで、作業効率の向上を図るレーザスキャナ及び動体検知方法を提供する。
【解決手段】投光光軸34に沿って測距光40を射出する投光光学系33と、測距光40を偏向し測定エリアに照射する偏向光学部材と、偏向光学部材を高低方向に回転させる高低角駆動部と、偏向光学部材を水平方向に回転させる水平角駆動部と、測距光40の反射光に基づき測定を行い測定エリアの距離データを求める測距部4と、測定エリアを含む画像データを連続して取得可能な第2の撮像部6と、制御部7とを具備し、制御部7は画像データと距離データとに基づき3次元画像を取得する第1の画像処理部と、時間的に隣接する画像データの比較により動体を検知する第2の画像処理部とを有する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BKと表面1FTとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が表面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と光入射面1BKとの間に位置すると共に、光入射面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
距離画像生成装置
【課題】精度の高い距離画像を生成することができる距離画像生成装置の提供。
【解決手段】変調した変調光を照射する発光源と、対象物で反射した反射光を受光して電荷に変換する複数の光電変換素子、前記光電変換素子ごとに設けられた複数の電荷蓄積部、及び、前記光電変換素子により変換された電荷を前記複数の電荷蓄積部に振り分ける手段と、を備えた撮像素子と、電荷に基づいて所定演算を行い、画素値が距離値である距離画像を生成する距離画像生成部と、光量を調整する光量調整手段と、電荷に基づいて、対象物で反射した反射光成分の振幅値を演算する演算手段と、前記光電変換素子の数をカウントするカウント手段と、を備え、前記光量調整手段は、前記カウント手段によりカウントされた光電変換素子の数が一定数を越えたとき、前記発光源の変調光の光量を下げるように調整する。
(もっと読む)
1 - 20 / 198
[ Back to top ]