
Fターム[5J084AD06]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 入射方向検出 (13)
Fターム[5J084AD06]に分類される特許
1 - 13 / 13
レーザレーダ装置

【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、反射部31によって反射光が反射される側に配置され、反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
対象物との相対位置計測方法と装置

【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検出する場合、樹木などの低反射物体が自車の進行方向に対して横方向から移動したと誤判断することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向(X軸方向)の物体を検出し(S10)、検出された物体が複数あるとき、複数の物体をグルーピングして物体群と認識し(S12)、認識された物体群内の物体同士の距離の合計値σpxが第1の所定値Lpxを超えるか否か判定し(S18)、時刻tから時刻t-nまでの間における1ステップごとの物体群のX軸方向の位置の差の合計値σpが第2の所定値Lpを超えるか否か判定し(S22)、1ステップごとの物体群のY軸方向の幅の合計値σwが第3の所定値Lwを超えるか否か判定し(S26)、少なくとも2つの判定結果が肯定されるとき(S30)、物体群が静止状態にあると判定する(S32)。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
方向検知デバイスおよび電子機器
【課題】被検知対象物の2軸に関する移動方向を検知する方向検知デバイスであって、安価である方向検知デバイスを実現する。
【解決手段】方向検知デバイス100は、被検知対象物106を検知するための検知信号を出力する発光部105Dと、検知信号が被検知対象物106にて反射されて得られた反射後検知信号が入力されるとともに、そのそれぞれが、3つの異なる出力A〜Cを出力する受光部105A〜105Cと、判定信号A〜Cの論理積を求めることによって、判定信号Dを生成する論理積回路102と、判定信号A〜Dに基づいて、被検知対象物106の、X軸およびY軸の2軸に関する移動方向を検知する判定装置103と、を備える。
(もっと読む)
追尾式レーザ干渉測長計
【課題】回転機構の回転角度を適切に取得することができる追尾式レーザ干渉測長計の提供。
【解決手段】追尾式レーザ干渉測長計1は、第1の再帰反射体としての測定基準器2と、被測定物Wに取り付けられる第2の再帰反射体としてのターゲット3と、測定基準器2にレーザ光源から出射される光を導くとともに、測定基準器2にて反射された光を出射する本体部4と、測定基準器2を中心として本体部4を回転させる回転機構5と、回転機構5を制御する制御装置6とを備える。本体部4は、測定基準器2にて反射された光を受光し、受光した光の位置を検出する二次元PSDを備える。制御装置6は、回転機構5の回転角度を取得する角度取得部63と、二次元PSDにて検出される光の位置に基づいて、角度取得部63にて取得される回転機構5の回転角度を補正する角度補正部64とを備える。
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 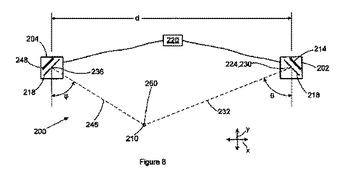 (もっと読む)
(もっと読む)
ユーザインタフェース装置、及びその制御方法
【課題】装置の負荷を抑えながら、ユーザに関する情報を十分に抽出できるユーザインタフェース装置を提供する。
【解決手段】所定の検出対象範囲の中から、ユーザが存在する範囲を検出する第1の検出手段と、第1の検出手段の検出対象範囲より狭い検出対象範囲の中から、ユーザの存在を検出する第2の検出手段と、を備え、第1の検出手段によりユーザの存在が検出された場合に、第2の検出手段の動作を開始させ、第2の検出手段による検出結果に応じて、検出されたユーザとの間で情報の入出力を行うユーザインタフェース装置である。
(もっと読む)
光位置検出装置および電子機器
【課題】光源の位置を高精度に検出でき、かつ安価な光位置検出装置を提供する。
【解決手段】送信系1は、第2光源12と第3光源13との間の一定距離L、第2光源12の送信系1に対する到来角度θ2、および、第3光源13の送信系1に対する到来角度θ3に基づいて、受信系2に対する送信系1の位置を検出する。
(もっと読む)
横方向及び長手方向の計測学システム
【課題】横方向及び長手方向の計測学システムを提供する。
【解決手段】本発明は少なくとも一つの基準衛星(SR)及び一つの第二の衛星(SS)を備えた人工衛星編隊飛行用の衛星計測学システムに関する。
基準衛星において、光源(SO)は第二の衛星(SS)を照らすことを目的としている光線を放射し、光検出器(CCD)の集合は第二の衛星によって反射された光を検出する。測定回路(CI)は第二の衛星(SS)からの光を受ける一つ又は複数の検出器を検知するために用いられる。
第二の衛星(SS)において、少なくとも一つの反射器(RR1)が基準衛星からの照射光を受け、それを基準衛星の検出器(CCD)の集合に向かって反射する。
適用範囲:人工衛星の編隊飛行
(もっと読む)
飛翔体追尾方法及び飛翔体追尾装置
【課題】 自機に向かって飛来するミサイルなどの飛翔体を発射後の早い時期に探知し、継続的に追尾することが可能な飛翔体追尾方法及び飛翔体追尾装置を得る。
【解決手段】 紫外線センサを設け、自機に向かって飛来するミサイルなどの飛翔体を、この飛翔体のプルームが発する紫外線を検出することにより、パッシブな手法でかつ早期に初期探知する。また、初期探知した飛翔体の赤外線画像を撮像して飛翔体のテール部を抽出後、このテール部から飛翔体の進行方向にレーザビーム光を照射することによって飛翔体のシーカ搭載位置を捕捉し、これを照準点としてレーザビーム光による飛翔体の追尾を継続する。
(もっと読む)
光センサ
光ビームが種々異なる方向に放射されて、場合によっては既存の対象で反射され、再度受信され、方向及び伝搬時間により、前記対象の3次元画像で評価されるセンサにおいて、光ビームの形成のために、光源が2次元マトリックスの形式で設けられている。 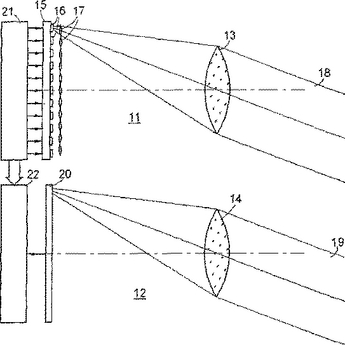 (もっと読む)
(もっと読む)
自己補償レーザトラッカ
例えばレーザに基づく座標測定装置、レーザトラッカ、又はその他の座標測定装置であり得る座標測定装置を補償する装置及び方法が提供される。一つの例示的な方法では、そのような補償は、埋め込まれたトラッカターゲットによるペイロードパラメータの自己補償を包含する。別の例示的な実施形態では、そのような補償は、埋め込まれた温度センサによるペイロード、アジマスポスト、軸、又はR0パラメータの自己補償を包含する。 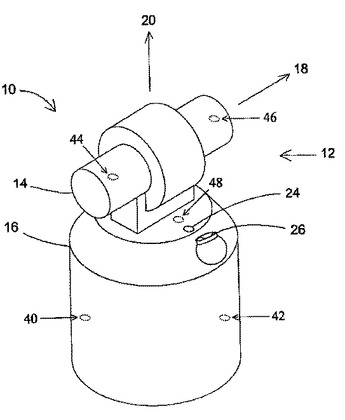 (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]