
Fターム[5J084AD07]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 三角測量法 (172)
Fターム[5J084AD07]に分類される特許
1 - 20 / 172
光3次元カメラ
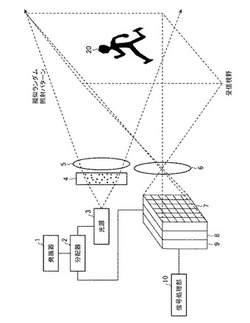
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
距離測定装置、および距離測定プログラム

【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
測距センサを備える距離測定装置および距離測定方法
【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
侵入検出装置及びロボットシステム
【課題】撮像部によって上方から撮像して侵入物を検出する場合、検出範囲の形が円錐形となり、検出範囲がそれだけ狭くなってしまう問題が生じる。
【解決手段】作業が行われる領域を含む作業面1と、作業面1に設けられた識別領域3と、識別領域3に対向する位置に設けられた反射鏡4と、反射鏡4を介して識別領域3を撮像する撮像部5と、撮像された識別領域3の画像に基づいて、識別領域3に侵入した侵入物を検出する侵入物検出部と、を有する。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。レンズフレーム11は、表面および裏面に凹凸構造11bを有している。発光レンズ5および受光レンズ6とレンズフレーム11との密着力が大幅に向上するので、発光レンズ5および受光レンズ6とレンズフレーム11との滑りを防止することができる。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
動体判別機能付き電子機器
【課題】測定対象物が動体であるか否かを正確に判別することができるコンパクトな動体判別機能付き電子機器を提供する。
【解決手段】動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
移動体の距離測定装置
【課題】距離測定中に、距離測定装置を搭載した移動体と、その移動体周囲の物体(被測定物)との距離が時々刻々変化する事態が発生しても、周囲物体までの距離をより安定的に測定可能とする。
【解決手段】車両MMの外方に向けて、上下方向に幅を有して横方向に延在した発光領域を有するパルス光を時間変調させて投光すると共に、予め設定した撮像領域内に位置する上記投光したパルス光を撮像し、撮像した画像から同期検波により上記パルス光を抽出する。そして、抽出したパルス光上端のエッジ部を検出して、その検出したエッジ部と車両MMとの距離を算出する。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
追尾式レーザ干渉測定装置の標的間絶対距離計測方法および追尾式レーザ干渉測定装置
【課題】絶対距離計などの複雑な装置を利用することなく、簡単な機構を追加するだけで、追尾式レーザ干渉測定装置の機構の回転中心と標的との距離が長い場合でも絶対距離を高精度に計測できるようにする。
【解決手段】 標的31にレーザ光を照射するレーザ干渉計13と、レーザ干渉計13の出射方向を変える2軸回転機構11,12と、2軸回転機構11,12を制御してレーザ干渉計13で標的31を追尾させる追尾式レーザ干渉測定装置10の標的間絶対距離計測方法であって、並進移動機構14により、レーザ干渉計13を第1位置に配置し、この第1位置で標的31をレーザ光20で捕捉し、次に、レーザ干渉計13を第2位置へ移動させ、この第2位置で標的31をレーザ光21で捕捉し、標的31の固定位置、第1位置および第2位置を頂点とする三角形についての幾何学演算を行い、第1位置にあるレーザ干渉計13と標的31との絶対距離Lを計測する。
(もっと読む)
1 - 20 / 172
[ Back to top ]