
Fターム[5J084AD08]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 光の干渉、干渉縞 (103)
Fターム[5J084AD08]に分類される特許
1 - 20 / 103
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
追尾式レーザ干渉計
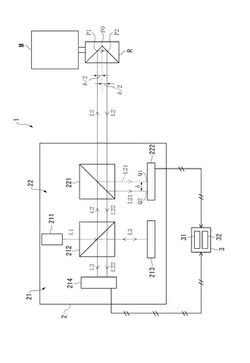
【課題】移動体の移動量と、移動体の移動方向と直交する方向におけるずれ量との測定にかかる測定時間を短くすることができるとともに、測定にかかるコストを低減できる追尾式レーザ干渉計を提供する。
【解決手段】追尾式レーザ干渉計1は、レトロリフレクタRで反射される測定光L22を用いて移動体Mまでの距離を測定する測長部21と、レトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22とを有する本体2と、検出器222からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備え、制御手段3は、本体2にレトロリフレクタRを追尾させることを停止させた状態で、レトロリフレクタRで反射された測定光L21の検出器222における受光位置Q2に基づいて、移動体Mの移動方向に対して直交する方向における移動体Mのずれ量を測定するずれ量測定部32を備える。
(もっと読む)
波長走査干渉計

【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
計数装置および計数方法
【課題】入力信号が時間的に非対称の場合でも計数結果を精度良く補正する。
【解決手段】カウンタ13は2値化信号のランレングスを数える。計数結果補正部14は、ランレングスの度数分布を、信号の立ち上がりから立ち下がりまでの第1のランレングスと立ち下がりから立ち上がりまでの第2のランレングスについて作成し、第1のランレングスの代表値THの0倍以上1倍未満の長さである第1のランレングスの数の総和、第2のランレングスの代表値TLの0倍以上1倍未満の長さである第2のランレングスの数の総和、{TH+(n−0.5)×(TH+TL)}以上{TH+(n+0.5)×(TH+TL)}未満の長さである第1のランレングスの数の総和、{TL+(n−0.5)×(TH+TL)}以上{TL+(n+0.5)×(TH+TL)}未満の長さである第2のランレングスの数の総和を求め計数結果を補正する。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測するために有利な波長走査干渉計を提供する。
【解決手段】波長走査干渉計は、光源から射出される光束の波長を変更しながら該光束から分割された参照光と被検光との干渉光の信号に基づいて被検体までの絶対距離を計測する。波長走査干渉計は、前記光源から射出される光束の波長が互いに等しい時刻である第1時刻およびその後の第2時刻と、前記第1時刻、前記第2時刻のそれぞれにおける前記干渉光の信号の周波数である第1周波数、第2周波数とに基づいて、前記被検体の移動による誤差成分が低減された絶対距離を算出する処理部を備える。
(もっと読む)
速度計測装置および方法
【課題】速度の計測範囲を広げる。
【解決手段】速度計測装置は、測定対象のウェブ11にレーザ光を放射する半導体レーザ1と、レーザ1の光出力を電気信号に変換するフォトダイオード2と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とが交互に存在するようにレーザ1を動作させるレーザドライバ4と、フォトダイオード2の出力電流を電圧に変換する電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力から搬送波を除去するフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の数を求める信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度を算出する演算部8を備える。レーザドライバ4は、第1の発振期間と第2の発振期間で時間に対する発振波長変化速度の絶対値が異なるようにレーザ1を動作させる。
(もっと読む)
追尾式レーザ干渉測定装置の標的間絶対距離計測方法および追尾式レーザ干渉測定装置
【課題】絶対距離計などの複雑な装置を利用することなく、簡単な機構を追加するだけで、追尾式レーザ干渉測定装置の機構の回転中心と標的との距離が長い場合でも絶対距離を高精度に計測できるようにする。
【解決手段】 標的31にレーザ光を照射するレーザ干渉計13と、レーザ干渉計13の出射方向を変える2軸回転機構11,12と、2軸回転機構11,12を制御してレーザ干渉計13で標的31を追尾させる追尾式レーザ干渉測定装置10の標的間絶対距離計測方法であって、並進移動機構14により、レーザ干渉計13を第1位置に配置し、この第1位置で標的31をレーザ光20で捕捉し、次に、レーザ干渉計13を第2位置へ移動させ、この第2位置で標的31をレーザ光21で捕捉し、標的31の固定位置、第1位置および第2位置を頂点とする三角形についての幾何学演算を行い、第1位置にあるレーザ干渉計13と標的31との絶対距離Lを計測する。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から、判定期間中の入力信号に含まれるノイズの度数分布を幾何分布と仮定した分布を求め、求めた分布とランレングス測定部101の測定結果から得られるランレングスの分布とを比較することにより、入力信号が有効か否かを判定する判定手段(確率算出部103、ノイズ度数算出部104、有効性判定部105)とを備える。
(もっと読む)
追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法
【課題】 測定される距離の測定誤差を容易に低減できる追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法を提供する。
【解決手段】 追尾式レーザ干渉計1は、移動体に取り付けられたレトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22を有する本体2と、追尾用光学部22からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備えるものであって、制御手段3は、レトロリフレクタRに入射する測定光L2とレトロリフレクタRで反射される測定光L2とを平行とするように検出器222で受光される測定光L21の目標位置Q2を設定する目標位置設定部32と、本体2の姿勢を制御し、レトロリフレクタRで反射された測定光L21を目標位置Q2に入射させる姿勢変更部33とを備える。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から得られるランレングス度数分布と幾何分布との一致度から、入力信号が有効か否かを判定する有効性判定部103とを備える。有効性判定部103は、ランレングスを測定するサンプリングクロックの判定期間中の総数をNsampとしたとき、判定期間中の総度数とNsamp/2との比、あるいは判定期間中の階級値1の度数とNsamp/4との比により、入力信号が有効か否かを判定する。
(もっと読む)
光学式計測装置及びその干渉計用プリズム。
【課題】ゴーストのない高精度な光干渉観測を可能にする。
【解決手段】第1の台形プリズム131、第1の直角プリズム132、第2の直角プリズム133、第3の直角プリズム134、第2の台形プリズム135、第4の直角プリズム136を貼り合わせて一体化した構造のプリズムユニットを用いる。上記第1の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第1の直角プリズムの斜面に貼り合わされ、上記第2の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第4の直角プリズムの斜面に貼り合わされている。また、上記第2の直角プリズム及び第3の直角プリズムは、各斜面の一方の面に偏光ビームスプリッタ膜が形成され、上記偏光ビームスプリッタ膜を挟んで各斜面が貼り合わされている。
(もっと読む)
測距方法及びレーザ測距装置
【課題】一つのレーザ照射手段を用いて高精度の測距が可能な測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及びレーザ測距装置は、波長の異なる複数のレーザ照射手段を用いるのではなく、スペクトル線幅が比較的広く多縦モード発振するレーザ照射手段を利用して測距を行う。このため、高精度の測距が可能でありながらレーザ照射手段が一つで良く、レーザ測距装置の光学系の作製をより容易に行うことができる。
(もっと読む)
距離測定装置および距離測定方法
【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
測距方法及びレーザ測距装置
【課題】演算部に対する負荷を抑えながら高精度の測距が可能な測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及びレーザ測距装置は、合成光の強度をモニタして、所定の強度以上のピーク位置の前後における強度データの対称性を確認することで、被測定物の測定点と対応する反射点の位置情報を取得する。そして、その位置情報に基づいて被測定物までの距離もしくは被測定物の2つの測定点間の厚み方向の距離を測距する。従って、強度データに基づく演算量を低減することが可能となり、演算部に対する負荷を抑えながら、レーザ光の可干渉性を利用した高精度な測距を行うことができる。
(もっと読む)
振動振幅計測装置および振動振幅計測方法
【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の物理量を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、少なくとも発振波長が連続的に単調増加する発振期間が繰り返し存在するように半導体レーザ1−1を動作させるレーザドライバ4−1と、レーザ1−1と発振波長の増減が逆になるように半導体レーザ1−2を動作させるレーザドライバ4−2と、レーザ1−1,1−2からのレーザ光とその戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2−1,2−2および電流−電圧変換増幅部5−1,5−2と、電流−電圧変換増幅部5−1,5−2の出力信号に含まれる干渉波形の周期を計測する信号抽出部7−1,7−2と、信号抽出部7−1,7−2の計測結果に基づいて物体10との距離および物体10の速度を算出する演算部8とを有する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】ある期間に観測される干渉波形の数を基に物理量を算出するバッチ処理方式と個々の干渉波形の周期を基に物理量を算出する逐次処理方式とを適宜切り替え可能にする。
【解決手段】物理量センサは、物理量の算出をバッチ処理方式で行う第1の演算部9と、物理量の算出を逐次処理方式で行う第2の演算部10と、信号抽出部8が計測した個々の干渉波形の周期から干渉波形の単位時間当たりの数を算出し、この数の変化の周波数をfsig、半導体レーザ1の発振波長変調の搬送波の周波数をfcarとしたとき、fsig>fcar/A(Aは1より大きい所定の定数)が成立する場合、第2の演算部10の算出結果を採用すべきと判定し、fsig>fcar/Aが成立しない場合、第1の演算部9の算出結果を採用すべきと判定する切替部12とを有する。
(もっと読む)
計測装置
【課題】簡易な構成でありながら、参照面と被検面との間の絶対距離を高精度に計測することができる計測装置を提供する。
【解決手段】第1の光源から射出される光の波長を、既知の真空波長である第1の基準波長又は第1の基準波長とは異なる既知の真空波長である第2の基準波長に設定するための波長基準素子と、参照面と被検面との間の空間の群屈折率を検出する屈折率検出部と、参照面で反射された光と被検面で反射された光との干渉信号を検出して、干渉信号から参照面と被検面との間の光路長に相当する位相を検出する位相検出部と、波長基準素子を用いて第1の光源から射出される光の波長を第1の基準波長から第2の基準波長に連続的に変更させながら第1の基準波長及び第2の基準波長のそれぞれについて、参照面と被検面との間の光路長に相当する位相を検出するように位相検出部を制御して、絶対距離を求める処理部とを有する計測装置。
(もっと読む)
1 - 20 / 103
[ Back to top ]