
Fターム[5J084AD12]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 電波を利用するもの (4)
Fターム[5J084AD12]に分類される特許
1 - 4 / 4
道路端検出装置、運転者支援装置、および道路端検出方法
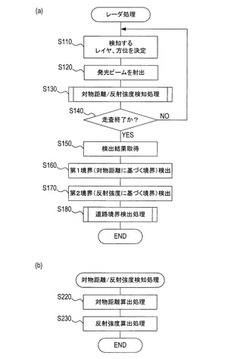
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
伝播時間測定装置における測定速度の増大

【課題】 測定速度を増大することが可能な面までの距離を測定するための装置を提供する。
【解決手段】 装置は、以前に送信した光パルス120の反射を受信する前に少なくとも一つの次の光パルス125を送信する。従って、複数の光パルスが所定の時刻に伝播中である。実施形態は、地勢図作成、深浅測量、地震学、障害検出、バイオマス測定、風速測定、温度計算、交通速度測定、軍事目標識別、地対空距離測定、高精細空間測量、狭域写真測量技術、大気組成、気象学、距離測定、及び数多くの他の用途に適用可能である。このような装置の例は、光検出及び測距(LIDAR)システム及びレーザー走査器のようなレーザー測距システムを含む。装置からデータ処理ユニットにより受信されるデータは、点群、デジタル面模型或いは面、地勢、及び/又は物体を記述するデジタル地勢模型のようなデータ模型を作成するために利用され得る。
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 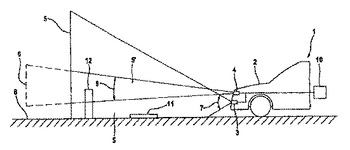 (もっと読む)
(もっと読む)
前方障害物検出機能付き携帯情報端末
【課題】 前方障害物を検知するために省電力設計された障害物検出センサを装備することにより、前方障害物を検知し、ユーザに報知することを可能にした携帯情報端末を提供する。
【解決手段】 障害物検出センサに加えて、振動センサを装備することにより、携帯情報端末が使用されている状況を検知し、その状況に応じて障害物センサを起動する。この障害物検出センサにより、端末のディスプレィを凝視しているユーザが注視していない前方障害物を検知し、報知することができる携帯情報端末ができる。また、振動センサに監視タイマーを設けることで、一定期間毎に振動センサを一時起動させる事により、省電力化がなされた。
(もっと読む)
1 - 4 / 4
[ Back to top ]