
Fターム[5J084BA11]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 可動光源、投光方向可変に関するもの (415)
Fターム[5J084BA11]に分類される特許
1 - 20 / 415
距離マーカ投射装置及びこれを備えた距離測定装置
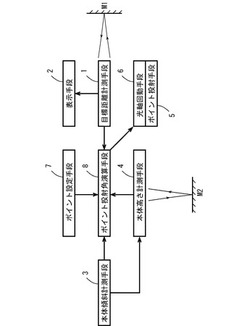
【課題】所定距離にマーカを投射し、当該所定距離の位置をユーザに視認させることのできる装置を提供する。
【解決手段】面上に光によるマーカを投射する装置であって、光によるマーカを投射するための光源5と、装置本体からマーカを投射する面上の所定位置までの当該面上における距離を記憶する記憶手段7と、面から装置本体までの高さを距離計の出力に基づいて求める手段4と、装置本体からマーカを投射する面上の所定位置までの面上における距離と面から装置本体までの高さとに基づいて、マーカを面上の所定位置に投射するための光源の光軸の角度を算出する演算手段8と、算出された光軸の角度に基づいて光源の光軸の角度を駆動制御し面上の所定位置にマーカを投射させる手段6とを備えた。
(もっと読む)
距離測定装置

【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
光学式測定装置
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
検査方法、及び検査システム
【課題】配置基準軸と設置基準軸とが規定条件を満たしているか否かの検査を、より好適に実施すること。
【解決手段】配置基準軸と設置基準軸とが水平方向に沿って不一致である場合、対象レーダ装置5では、右規定範囲と左規定範囲とが左右非対称となるため、右規定範囲と左規定範囲とでは、検出開始時間Tsが不一致となる。この場合、対象レーダ装置5から照射され、輪郭範囲の大きさは、正常輪郭範囲の大きさに比べて、大きくなったり小さくなったりする。配置基準軸と設置基準軸とが垂直方向に沿って不一致であれば、輪郭範囲は、対象レーダ装置5を中心として、正常輪郭範囲が回転した形状となる。したがって、検出開始時間Tsが基準時間を超え、検出時間Tdが基準範囲を超えていれば、配置基準軸と設置基準軸とが規定条件を満たしていないことがわかる。
(もっと読む)
レーザレーダ装置
【課題】三次元走査可能なレーザレーダ装置において、水平方向に近い方向にレーザ光を走査する場合に水平方向から外れた方向からの外乱光の影響を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1には、フォトダイオード20(受光手段)で受光可能となる視野範囲を変更可能な視野範囲変更手段が設けられている。この視野範囲変更手段は、集光レンズ62からフォトダイオード20までの経路長さを調整すること視野範囲を変更しており、偏向部41からのレーザ光L1の方向が第1方向(水平方向とのなす角度が相対的に大きくなる方向)に設定されている場合には、視野範囲を相対的に広い第1範囲に設定し、レーザ光L1の方向が第2方向(水平方向とのなす角度が相対的に小さくなる方向)に設定されている場合には、視野範囲を第1範囲よりも狭い第2範囲に設定している。
(もっと読む)
レーザレーダ装置
【課題】広い画角と長い距離の測距の双方を実現することができるレーザレーダ装置を得ることを目的とする。
【解決手段】変調信号でレーザ光を変調し、変調後のレーザ光を測距対象物に向けて走査するレーザ光送信部1と、視野が異なる複数の受信光学系21a,21bを用いて、測距対象物に対するレーザ光の散乱光を受信し、その散乱光を示す電気信号を出力する散乱光受信部2と、散乱光受信部2から出力された電気信号と変調信号の位相差あるいは時間差を検出するとともに、その記電気信号の振幅を検出する距離強度検出装置32とを設け、画像処理装置33が距離強度検出装置32により検出された位相差あるいは時間差に基づいて測距対象物までの距離を算出する。
(もっと読む)
レーザレーダおよび受光装置
【課題】投射光学系と受光光学系が同一筺体内にあっても、目標領域からの反射光を適正に受光することができるレーザレーダおよび受光装置を提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、レーザ光を目標領域において走査させるミラーアクチュエータ24と、目標領域からのレーザ光の反射光の角度成分と異なる角度成分の光を除去する視野コントロールフィルム32と、視野コントロールフィルム32を透過した反射光を受光する光検出器35と、反射光を光検出器35に集光させる受光レンズ34と、を備える。筐体10内で反射または回折した後受光レンズ34に向かう光は、視野コントロールフィルム32によって除去される。
(もっと読む)
レーザレーダおよび受光装置
【課題】簡素な光学フィルタにより目標領域からの反射光を適正に受光することができ、かつ小型化を図ることのできるレーザレーダおよび受光装置を提供する。
【解決手段】レーザレーダは、レーザ光を出射するレーザ光源21と、レーザ光を目標領域において走査させるミラーアクチュエータ24と、目標領域からのレーザ光の反射光を収束させる受光レンズ32と、受光レンズ32により収束された反射光を、受光レンズ32に入射する際の反射光よりも小さいサイズとし、且つ、平行光に近づけるための凹レンズ33と、凹レンズ33を透過した反射光が入射され、レーザ光の波長帯以外の不要な光を除去するためのバンドパスフィルタ34と、バンドパスフィルタ34を透過した反射光を受光する光検出器35と、を備える。
(もっと読む)
追尾式レーザ干渉測定装置の標的間絶対距離計測方法および追尾式レーザ干渉測定装置
【課題】絶対距離計などの複雑な装置を利用することなく、簡単な機構を追加するだけで、追尾式レーザ干渉測定装置の機構の回転中心と標的との距離が長い場合でも絶対距離を高精度に計測できるようにする。
【解決手段】 標的31にレーザ光を照射するレーザ干渉計13と、レーザ干渉計13の出射方向を変える2軸回転機構11,12と、2軸回転機構11,12を制御してレーザ干渉計13で標的31を追尾させる追尾式レーザ干渉測定装置10の標的間絶対距離計測方法であって、並進移動機構14により、レーザ干渉計13を第1位置に配置し、この第1位置で標的31をレーザ光20で捕捉し、次に、レーザ干渉計13を第2位置へ移動させ、この第2位置で標的31をレーザ光21で捕捉し、標的31の固定位置、第1位置および第2位置を頂点とする三角形についての幾何学演算を行い、第1位置にあるレーザ干渉計13と標的31との絶対距離Lを計測する。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】ミラーの回動精度を保ちつつ、可動部に対する給電を円滑に行い得るミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ1は、支軸24について回動可能なミラーユニットフレーム11と、支軸17に配されたミラー19と、マグネットユニット20とミラーユニットフレーム11とを連結するサスペンションワイヤー26a〜26fと、ミラーユニットフレーム11と支軸17とを連結するサスペンションワイヤー16a〜16dとを備える。サスペンションワイヤー16a〜16d、26a〜26fにより、ミラーユニットフレーム11に装着されたチルトコイル11bと、支軸17に装着されたパンコイル12b、13bに給電でき、ミラーユニットフレーム11と支軸17に対し、一定かつ安定的な抗力が付与される。
(もっと読む)
レーザレーダ
【課題】簡素な構成の光検出器により目標領域からの反射光を適正に受光することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光源21と、ピンホール23aを有するピンホール板23と、ピンホール23aを通過したレーザ光を目標領域において走査させるミラーアクチュエータ25と、目標領域により反射され、さらに、ピンホール板23のミラー面23bによって反射されたレーザ光を受光する光検出器33とを備える。ピンホール板23は、レーザ光の光軸に対して傾くように配置され、レーザ光源21側と反対側の面がミラー面23bとなっている。ミラー69が回動しても、光検出器33に対する反射光の入射位置は変化しないため、単一受光面の小さな光検出器33により、反射光を適正に受光することができる。
(もっと読む)
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
(もっと読む)
物体認識装置
【課題】移動物の認識を精度良く、且つ、より迅速に行うことを可能にする。
【解決手段】現時点におけるマッピング処理で絶対座標系上のグリッドセルに座標位置を割り当てられたか否かの情報と、マッピング処理での座標位置の割り当ての有無の尤もらしさについて予め定められた尤度情報と、ベイズ推定における事前確率としての現時点の直近の過去についてのグリッドセルの占有確率とをもとに、ベイズ推定を用いて現時点での各グリッドセルにおける占有確率を算出し、算出した占有確率をもとに、占有確率が所定の範囲にあるグリッドセルに割り当てられた座標位置の集合に対応する物体を移動物として認識する
(もっと読む)
レーダ装置
【課題】車幅方向中心から離れた位置に設置するレーダ装置において、レーダ装置の設置位置が基準設置位置からズレたか否かを検出すること。
【解決手段】レーダ装置は、自車両の前部において、自車両の車幅方向中心から離れ、かつ、規定角度範囲の中心軸が自車両の車幅方向の中心軸と自車両の前方にて交差するように、検知基準軸と設置基準軸との関係が規定された基準設置位置に固定して使用される。そのレーダ装置では、物体検知処理を実行する(S110)ことで生成した検知データの中から、抽出条件に合致する対象検知データを特定する(S120〜S200)。そして、複数の対象検知データによって表される水平確定位置を水平基準データに照合した結果が、判定基準値Thd未満であれば(S230:NO)、検知基準軸にズレが生じているものと判定して、ズレ対応処理を実行する(S240)。
(もっと読む)
距離測定装置および距離測定方法
【課題】光ビームを測定対象物に照射して測定対象物までの距離を測定する距離測定装置および距離測定方法において、光ビームの照射ができない範囲が無く、従来に比べて捜査範囲を広くする。
【解決手段】光ビームを測定対象物に照射して測定対象物までの距離を測定するとき、距離測定装置は、向きの異なる複数の光ビームのそれぞれをビーム出射部から出射する。このとき、距離測定装置は、反射面上に沿って回転軸を持ち、前記回転軸の周りに軸回転する1つまたは複数の反射ミラーの反射面上の前記回転軸の位置で前記複数の光ビームを反射させることにより、測定対象物に前記光ビームのそれぞれを照射させる。距離測定装置は、前記光ビームの照射により測定対象物で反射して戻ってきた反射ビームを前記反射ミラーで反射させて受光し、受光した前記反射ビームを用いて、測定対象物までの距離情報を求める。
(もっと読む)
ビーム照射装置
【課題】光検出器上におけるサーボ光の理想軌道を線形に近づけることができ、且つ、サーボ光によるミラーの制御を円滑に行うことができるビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光を出射する走査用レーザ光源201と、サーボ光を出射する半導体レーザ301と、走査用レーザ光とサーボ光の進行方向を一致させるダイクロイックミラー401と、走査用レーザ光を走査させるミラー150と、サーボ光を分離するダイクロイックミラー402と、サーボ光を受光するPSD311と、PSD311からの信号に基づいて位置検出信号を生成する位置信号生成回路8と、位置検出信号に基づいてミラー150を駆動するマイコン12とを備える。走査用レーザ光とサーボ光がミラー150に入射するため、走査用レーザ光が目標領域を水平に走査すると、サーボ光はPSD311上を線形に走査する。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】自身から射出された光波を反射した物体までの距離を測定する距離測定装置において、受光部に高感度な受光素子を用いても外乱光の入射を抑制することができる技術を提供する。
【解決手段】レーダ制御部は、発光部による光波の射出後、所定の測定領域内での反射波を検出可能な時間範囲内だけ受光部に光波を入射させるよう制御する(S220,S230,S250,S260)。そして、レーダ制御部は、受光部による出力に基づいて光波を反射した物体までの距離を演算する(S240)。このようなレーダ装置によれば、所定の測定領域内での反射波を検出可能な時間範囲以外では、受光部が光波を入射させないようにすることができる。よって、反射光の光量を抑制することなく外乱光の入射を抑制することができ、良好に物体までの距離を測定することができる。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】ビーム照射装置は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光を受光するとともに受光したレーザ光の強度に応じた信号を出力する光検出器33と、レーザ光源21を駆動するスキャンLD駆動回路44と、レーザ光源21を制御するDSP46と、を備える。DSP46は、光検出器33から出力される信号が所定の閾値を超えると、レーザ光源21の出力を減少させる。
(もっと読む)
障害物検知装置
【課題】演算処理量を軽減して、自車の車高よりも低い位置に存在する空中障害物を検知することができる障害物検知装置を提供する。
【解決手段】路面から所定の高さH/2の位置に、水平方向に対して第1の角度θ1で下向きに車両Aに設置され、第1のレーザー光を発光・受光して第1の障害物(路面)を検知する第1の検知手段1と、車両Aの上端から所定の高さH/2だけ低い位置に、水平方向に対して第1の角度θ1と対称の角度である第2の角度θ2で上向きに設置され、第2のレーザー光を発光・受光して第2の障害物(空中障害物)を検知する第2の検知手段2と、第1の検知手段1による発光から受光までの第1の時間T1と第2の検知手段2による発光から受光までの第2の時間T2とを比較して、第2の障害物が車両Aの車高Hよりも低い位置に存在する空中障害物であるか否かを判断する判断手段3と、を有する。
(もっと読む)
レーザ測定装置
【課題】レーザ光が規定方向に照射される回動位置を正確に「基準位置」として設定することができ、その基準位置に基づいて検出物体の相対位置をより精度高く算出し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置1は、検出される距離値が所定の距離条件を満たし、且つ検出される受光量が所定の受光量条件を満たす回動位置を「基準位置」として検出する「基準位置検出手段」と、「基準位置検出手段」によって検出された「基準位置」を基準とする偏向部41の相対的な回動位置を検出する「相対位置検出手段」と、フォトダイオード20(受光手段)によって反射光が受光されたとき、「相対位置検出手段」による相対的な回動位置の検出結果に基づいて検出物体の方向を検出する「方向検出手段」とが設けられている。
(もっと読む)
1 - 20 / 415
[ Back to top ]