
Fターム[5J084BA20]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 投光波長に関するもの (338) | 赤外線方式 (184)
Fターム[5J084BA20]に分類される特許
1 - 20 / 184
監視装置
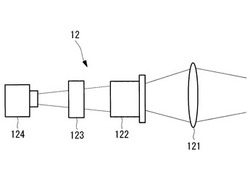
【課題】アイセーフ光を用いた監視を実現することのできる監視装置を提供することを目的とする。
【解決手段】1400nm以上の波長帯域のレーザ光を射出する送光部と、送光部から射出されたレーザ光が物体に到達し、物体により反射された反射光を受光し、画像信号に変換して出力する撮像部12と、撮像部12からの画像信号を用いて監視画像を作成する画像処理装置とを備え、撮像部12は、入射光を増幅する増幅機能とシャッタ機能とを備えたイメージインテンシファイア123と、イメージインテンシファイア123よりも光の入射側に配置され、イメージインテンシファイア123の適用可能な波長範囲に反射光の波長を変換する波長変換デバイス122と、イメージインテンシファイア123を通過した光を受光するカメラ124とを備える監視装置を提供する。
(もっと読む)
情報取得装置、情報取得方法、及びタグ装置

【課題】タグ装置の消費電力を低減することができる情報取得装置を提供すること。
【解決手段】情報取得装置は、光ビームを出射する出射部と、前記出射部から出射された光ビームが物体で反射した再帰光を受光する受光部と、前記受光部により前記再帰光が受光された場合に、前記物体から送信された情報信号を受信する受信部と、前記受信部により受信された情報信号に基づき、前記物体の識別情報を取得する取得部と、を備える。
(もっと読む)
測距センサを備える距離測定装置および距離測定方法
【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
光学式遠隔気流計測装置の有色ノイズ低減方法とその装置
【課題】本発明の目的は、装置の外部環境に応じた有色ノイズであっても低減することができ、計測信頼性の劣化が少なくより遠距離まで計測可能で、広い飛行速度範囲に対応できる光学式遠隔気流計測装置を提供することにある。
【解決手段】本発明の光学式遠隔気流計測装置の有色ノイズ低減方法は、レーザ光を送信信号として大気中に放射して、受信信号との間の周波数のドップラーシフト量に基づき遠隔領域の気流の風速を計測する光学式遠隔気流計測装置において、最遠方以遠の領域では散乱光の信号強度がほとんどないとみなし、その最遠方以遠の計測領域においてある周波数間隔で分割されたドップラー周波数成分毎に信号強度の平均化処理を行ってノイズ分布を算出し、該ノイズ分布をある距離間隔で分割された計測領域の信号強度分布のすべてに対して該ドップラー周波数成分毎に減算処理を行うものとした。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
自動水栓
【課題】 使用者の用途に応じた吐水形態の切り替えを可能とする自動水栓を提供する。
【解決手段】 給水経路から給水された水を吐出する吐水口と、前記給水経路に接続された電磁弁と、前記電磁弁を駆動することで吐水と止水とを切り替える制御部と、前記吐水口近傍の異なる位置に設けられた少なくとも2つの検知センサと、を備え、前記検知センサの検知領域が検知センサ近傍において重なっていない自動水栓において、前記制御部は、いずれかの検知センサの検知レベルが所定の吐水検知レベル以上であると吐水を行うと共に、一方のセンサの検知レベルが吐水検知レベルより高く設定された近接検知レベル以上であると、他方のセンサの検知レベルに基づいて吐水と止水の切り替えを行う。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
画像形成装置
【課題】装置を使用する予定のない人を検知してしまう誤検知を抑制することをより簡易な構成で実現することができる技術を提供する。
【解決手段】記録材に画像を形成する画像形成部と、人が操作するユーザインタフェースと、画像形成部を収納する装置筐体におけるユーザインタフェースを操作する人が位置する側の外面を形成する支持部カバー500と、人を検知する第1の人検知部600と、を備え、第1の人検知部600は、ユーザインタフェースを操作する人が位置すると想定される領域に人が近づいてきたことを検知可能な向きに配置された焦電型センサ610を有し、支持部カバー500は、第1の人検知部600の手前側に配置されて焦電型センサ610の検知範囲の一部を覆うことで、第1の人検知部600の検知範囲A1を水平面に対して斜め下方の範囲に限定する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
1 - 20 / 184
[ Back to top ]