
Fターム[5J084BA39]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 受光系に関するもの (1,335) | 複数の受光素子を有するもの (515) | 1次元配列 (69)
Fターム[5J084BA39]に分類される特許
1 - 20 / 69
測距装置
【課題】送信波を反射した物標から到来する反射波を、より高精度に検出することが可能な測距装置を提供する。
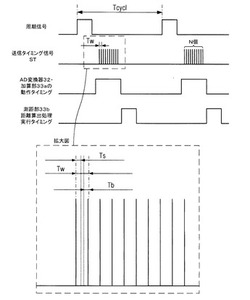
【解決手段】測距装置では、測定周期Tcyclを表す周期信号を発生させ、この周期信号に同期してN個のパルス信号からなる送信タイミング信号STを発生させることで、レーザ光を送信する。なお、各パルス信号は、当該装置の最大検知距離をレーザ光が往復するのに要する時間より充分に長い時間間隔Twで出力される。そして、AD変換器32が、N個のパルス信号のそれぞれについて所定のサンプリング間隔で信号をサンプリングし、加算部33aが、時間間隔Twのうち複数の計測期間Tsおよび送信前期間Tbの間、各送信波の送信タイミングを基準として同一時間にサンプリングされたサンプリング値同士を加算する。そして、測距部33が、複数の送信前期間Tbのサンプリング値の全てを参照してレーザ光の反射波の検出に必要な検出閾値を設定する。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法

【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
人体検知センサ及び自動水栓
【課題】検知性能と省エネルギー性能とを両立した人体検知センサを提供すること。
【解決手段】発光部25が投射した光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、発光部25による発光動作、及び撮像部26による受光動作を制御する撮像制御手段311と、反射光を受光したラインセンサ261の特定の画素の受光量の時間的な変化量が所定の閾値以上であるか否かを判定する第1の判定手段321と、第1の判定手段321が肯定的に判定したときに、ラインセンサ261に対する反射光の入射位置に応じて被検知対象の有無を判定する第2の判定手段322と、を備えている。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
指示位置検出装置
【課題】使用環境の制約が少なく、簡易な構成の指示位置検出装置により、安価に精度良く入力操作を検出する。
【解決手段】本発明は、入力面上での操作者による指示位置を、距離センサを用いた検出装置で検出する。指示位置は、光飛行型距離センサが算出した、検出装置から認識対象物までの距離値と、各距離値を得た素子位置とにより特定する。光飛行型距離センサには、電荷振分け型の撮像素子を用い、高周波成分のみ抽出し、距離値を算出する。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
距離測定装置
【課題】本発明は、複数ビームを使用した3角測量方式による距離測定装置において、複数ビームの山部のプロファイルの非対称性による測定精度のバラツキを軽減した距離測定装置を提供する。
【解決手段】レーザビームを偏向して、複数点を時分割で同じ時間、且つ、同じ間隔で測定物表面を照射する偏向ビーム生成部13とレーザビームの反射光を1つの走査信号として、レーザビームの偏向タイミングと同期して受光するCCDカメラ部11と、偏向ビーム生成部とCCDカメラ部とを固定する検出基盤部12とを備える検出部1と、CCDカメラ部の出力を一定に制御するAGC21と、当該出力のビームプロファイルの形状と位置の変化から、測定物10表面と検出部1との距離を求める演算部22とを備える。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
投光ビームの調整方法
【課題】シャインプルーフ光学系を用いた光学式変位センサにおいて、測定精度が安定した投光ビームの調整方法を提供する。
【解決手段】シャインプルーフ光学系を用いた光学式変位センサ10は、測定対象物に対して光を照射する投光モジュール9と、投光モジュール9からの光が測定対象物で反射して、反射光を受光面で受光する受光部13と、測定対象物と受光部13との間に位置して、反射光を受光面に結像する受光レンズ14とを備える。投光ビームの調整方法は、受光部13における像のサイズが、投光モジュール9を構成する投光レンズ12と測定対象物との距離によらず一定になるように光源11から照射される光の焦点位置を調整する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備えている。フォトゲート電極PGは、光入射面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から裏面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
光学式測距装置
【課題】簡単な構造にて、周囲温度の変化と自己発熱とによる測距精度の低下を防ぐことができる光学式測距装置を提供する。
【解決手段】測距対象物までの距離を測定しているときの温度センサ25によって検出された温度と、上記距離を測定していないときの温度センサ25によって検出された温度との変化量に基づいて検出値を補正した後に三角測距法により測距対象物までの距離を算出する受光素子12と、発光レンズ14及び受光レンズ15の間の距離を制御するレンズ間距離制御部18とを備えており、レンズ間距離制御部18は、測距装置10の周囲温度の変化によって生じる測距装置10の温度の変化に対する、発光レンズ14と受光レンズ15との間の距離の変動量と、測距装置10の自己発熱によって生じる測距装置10の温度の変化に対する当該距離の変動量とを近づけるように、当該距離を制御する。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】高耐熱性を有してリフローまたはフロー半田による実装を可能にする。
【解決手段】発光素子12と受光素子13および信号処理部14との夫々を透光性樹脂で封止して成る第1,第2樹脂形成体16,17を、高耐熱の遮光性熱可塑性樹脂で一体成形して第3樹脂形成体18を形成し、この第3樹脂形成体18上に、金属部25に熱硬化性樹脂で発光レンズ23および受光レンズ24が成形されたレンズ板21を載置する。そして、高耐熱の遮光性熱可塑性樹脂で一体成形して第4樹脂形成体26を形成し、レンズ板21を第4樹脂形成体26によって第3樹脂形成体18に固定する。このように、第1,第2樹脂形成体16,17を、高耐熱の遮光性熱可塑性樹脂でモールドすると共に、発光レンズ23および受光レンズ24を熱硬化性樹脂で成形することにより、光学式測距センサの実装時における耐熱性を高め、リフローまたはフロー半田による実装を可能にする。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
測距センサおよび電子機器
【課題】周辺光による誤測距または誤検知を回避することができる測距センサを提供する。
【解決手段】測距センサ1は、第1信号光Rf1を出射する第1発光素子11と、第2信号光Rf2を出射する第2発光素子12と、第1信号光Rf1または第2信号光Rf2を受光して受光信号を出力する受光素子部20とを備える。第1発光素子11および第2発光素子12は、受光素子部20の光軸20bと交差する平面上に配置され、第1発光素子11は、平面上で受光素子部20の光軸20bに対して第1方位に配置され、第2発光素子12は、平面上で受光素子部20の光軸20bに対して第1方位とは異なる第2方位に配置されている。これによって、周辺光による誤測距または誤検知を回避することができる。
(もっと読む)
光学式測距装置および電子機器および光学式測距装置の校正方法
【課題】パッシブ測距方式を用いずに、窓材からの反射による誤測距または誤検知を防止できる小型の光学式測距装置を提供する。
【解決手段】受光素子12は、発光素子から出射されて測距対象物16により反射された第1の光束17と発光素子11から出射されて窓材15により反射された第2の光束18とを受光レンズ14を介して受光して、第1,第2の光束17,18の受光素子12上における光強度分布を検出する。光強度分布抽出部により、受光素子12により検出された第1,第2の光束17,18が照射された受光素子12上における光強度分布から、第2の光束18の受光素子12上における光強度分布を減算して、第1の光束17の受光素子12上における光強度分布を抽出する。光強度分布抽出部により抽出された第1の光束17の受光素子12上における光強度分布に基づいて、測距対象物16までの距離を距離演算部により演算する。
(もっと読む)
光電スキャナ
【課題】空間領域の走査において従来より大きな角度領域を捕らえられるスキャナの提供。
【解決手段】光線16を出射するための発光器12、第1の部分期間には前方の監視領域26を、また第2の部分期間にはスキャナ10の後方領域を交互に塗りつぶすように第1の偏向方向に光線を周期的に偏向させるための第1の偏向ユニット18、20、監視領域から拡散反射又は直反射された光線32から受光信号を発生させるための受光器38、及び受光信号に基づいて監視領域内の物体30を認識するように構成された評価ユニット40を備える光電スキャナを提供する。このスキャナには、光線を第2の偏向ユニット44へ向けて方向転換させるために後方領域に方向転換ユニット42が設けられ第2の偏向ユニットが光線を第1の偏向方向に対して横方向に延伸する第2の偏向方向に周期的に偏向させるように構成されている。
(もっと読む)
過冷却浮遊水滴のための飛行中に働く複数視野の検出器
【課題】本装置は、浮遊水滴の存在を検出し、かつ、レーザビームが雲を貫通したとき、そのビームの横方向散乱を測定することによって、それら水滴の直径のプロファイルを反映した情報を提供する。
【解決手段】飛行中に働く複数視野の水滴センサは、照射部と検出部とを備える。照射部は、光ビームを出力するように構成された、第1の光学的ビームエミッタを備える。検出部は、後方散乱光の第1の部分を、サークルツウライン変換器の内側反射面に向けて導くように構成された万華鏡と、サークルツウライン変換器によって反射された光を受光するように構成された、少なくとも第1の検出器を有する複数視野のサブシステムと、後方散乱光の第2の部分を受光するように構成された単一視野のサブシステムとを備え、第2の部分は、サークルツウライン変換器によって反射されていない。単一視野のサブシステムは、単一視野中の情報に基づき、液体水滴と氷晶の間を区別するためのデュアルチャネル円偏光検出器を備えることができる。
(もっと読む)
1 - 20 / 69
[ Back to top ]