
Fターム[5J084BB01]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825)
Fターム[5J084BB01]の下位に属するFターム
集光レンズ、集束レンズ (283)
ズームレンズ (24)
コリメータレンズ (170)
可動レンズ (75)
フレネルレンズ (21)
シリンドリカルレンズ (46)
屈折率分布型レンズ (2)
穴開きレンズ (7)
その他の組合せレンズ (34)
Fターム[5J084BB01]に分類される特許
1 - 20 / 163
信号処理装置
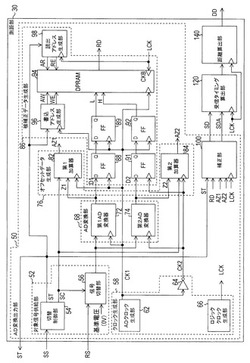
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
車両用制御装置

【課題】基準軸のずれが発生したことを精度よく検出することが可能な車両用制御装置を提供する。
【解決手段】運転者支援システムにおけるヘッド部では、車両に対する物標探査器7の姿勢変化量(傾斜量,加速度)を検知する姿勢検知器8が、物標探査器7とともに筐体30の内部に固定されており、制御部20が、姿勢検知器8にて検知した姿勢変化量が予め設定された閾値変化量(閾値傾斜量,第1の加速度)を上回る場合に、物標探査器7の基準軸のずれが発生したことを検出する。つまり、実際に物標探査器7が車両に対して所定量ずれている場合に、物標探査器7の基準軸のずれが発生しているものとみなすことにより、基準軸のずれが発生したことを精度よく検出することが可能となる。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
光学式測定装置
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
レーダ装置
【課題】走査反射部と偏光分離素子との間の位置関係の調整を不要にすることができるレーダ装置を提供
【解決手段】レーダ装置1は、レーダ波となるパルスレーザ光を照射する光源2と、レーザ光を検出する光検出器3と、光源2から照射されたレーザ光を走査する走査部5と、入射したレーザ光を光検出器3へ導く受光光学系6とを備える。また走査部5は、偏光分離光変角素子11と、再帰性反射素子12と、1/4波長板13とから構成される。そして偏光分離光変角素子11は、レーザ光を透過可能な材料で形成された板形状の基板21と、偏光分離機能を有する構造となるように基板21の面上に形成された偏光分離構造体22とから構成される。そして偏光分離光変角素子11は、基板21に設けられた回転軸23を中心にして振動し、光源2から照射されたレーザ光のうちTM成分を透過させるとともにTE成分を所定走査角度範囲で走査する。
(もっと読む)
距離測定方法および距離測定装置
【課題】簡易な構成で、物標までの距離の測定精度を向上可能な距離測定方法および距離測定装置を提供する。
【解決手段】発光トリガ信号をきっかけに発光部から照射されたレーザ光の物標からの反射光を受光する受光部は、発光部からレーザ光が照射されるタイミングで、出力する電気信号に変動が生じるように構成されている。制御部では、測定部からトリガ信号が出力されてから、測定部にて検出される電気信号に最初に生じる電気信号の変動を第1変動信号、二番目に生じる変動を第2変動信号、第1変動信号が生じるまでの期間を第1期間、第2変動信号が生じるまでの期間を第2期間として、第1期間および第2期間の差を第1の距離測定時間として測定する(S110−S175)。続いて、第1の距離測定時間と予め定められた距離係数とを乗算した値を物標までの距離として算出する(S180)。
(もっと読む)
レーザレーダ装置
【課題】 スキャン周期を必要に応じて制御可能なレーザレーダ装置を提供する。
【解決手段】 近距離ターゲットが有るか否かを判断し(S150)、近距離ターゲットがある場合(S150:YES)、測距時間要因を変更設定する(S160)。具体的には、通常時よりも、レーザ光の出射間隔である「発光間隔」を短くし、また、同一探査領域からの反射光の「受光回数」を減らすようにする。そして、設定された測距時間要因で測距を行い(S100)、ターゲットの位置を取得し(S110)、ターゲットの速度を算出して(S120)、データを更新する(S130)。つまり、非可動の配光器を用いて探査領域へ並行してレーザ光を照射するようにし、レーザ光の出射間隔及び反射光の受光回数を変更することで、探査に要する時間を変更する。
(もっと読む)
車載レーダ装置
【課題】道路環境に適した検知が可能な車載レーダ装置を提供する。
【解決手段】車両が左側通行であることに基づいて生じる左右非対称な道路環境や、ドライバの習性に基づいて生じる左右非対称な死角範囲を考慮して、右方向の検知に用いる右照射光SRは長い検知距離を、左方向の検知に用いる左照射光SLは、広い検知範囲を確保できるように設定(αL>αR,γL>γR,βL>βR)する。これにより、交差点に進入した時に交差道路の手前側車線を右方向から自車両に向かって接近してくる車両を、早期に検知することができると共に、ドライバの注意が右側に偏ることによって左側から前方にかけて広がる死角中の物標を、的確に検知することができる。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間で受光し、第2照射タイミングで照射された前記照射光の前記反射光を第2受光期間でそれぞれ受光するとともに、前記第1照射タイミング又は前記第2照射タイミングに対して予め決められた第3受光期間で受光し、前記演算部は、前記第1受光期間〜前記第3受光期間で得られた光電子数とを用いて前記測距対象までの距離を算出し、前記第1受光期間及び前記第2受光期間は前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含み、前記第3受光期間は前記固体撮像装置に到達する前記反射光の強度が一定となる時間である。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
パノラマ画像作成方法及び3次元レーザスキャナ
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
距離速度測定装置
【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
距離測定器及びその製造方法
【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
速度計測装置および方法
【課題】速度の計測範囲を広げる。
【解決手段】速度計測装置は、測定対象のウェブ11にレーザ光を放射する半導体レーザ1と、レーザ1の光出力を電気信号に変換するフォトダイオード2と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とが交互に存在するようにレーザ1を動作させるレーザドライバ4と、フォトダイオード2の出力電流を電圧に変換する電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力から搬送波を除去するフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の数を求める信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度を算出する演算部8を備える。レーザドライバ4は、第1の発振期間と第2の発振期間で時間に対する発振波長変化速度の絶対値が異なるようにレーザ1を動作させる。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
レーザレーダおよび受光装置
【課題】投射光学系と受光光学系が同一筺体内にあっても、目標領域からの反射光を適正に受光することができるレーザレーダおよび受光装置を提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、レーザ光を目標領域において走査させるミラーアクチュエータ24と、目標領域からのレーザ光の反射光の角度成分と異なる角度成分の光を除去する視野コントロールフィルム32と、視野コントロールフィルム32を透過した反射光を受光する光検出器35と、反射光を光検出器35に集光させる受光レンズ34と、を備える。筐体10内で反射または回折した後受光レンズ34に向かう光は、視野コントロールフィルム32によって除去される。
(もっと読む)
移動体の距離測定装置
【課題】距離測定中に、距離測定装置を搭載した移動体と、その移動体周囲の物体(被測定物)との距離が時々刻々変化する事態が発生しても、周囲物体までの距離をより安定的に測定可能とする。
【解決手段】車両MMの外方に向けて、上下方向に幅を有して横方向に延在した発光領域を有するパルス光を時間変調させて投光すると共に、予め設定した撮像領域内に位置する上記投光したパルス光を撮像し、撮像した画像から同期検波により上記パルス光を抽出する。そして、抽出したパルス光上端のエッジ部を検出して、その検出したエッジ部と車両MMとの距離を算出する。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
1 - 20 / 163
[ Back to top ]