
Fターム[5J084CA22]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491)
Fターム[5J084CA22]の下位に属するFターム
Fターム[5J084CA22]に分類される特許
1 - 20 / 110
レーザレーダシステム、レーザ測距装置および制御装置
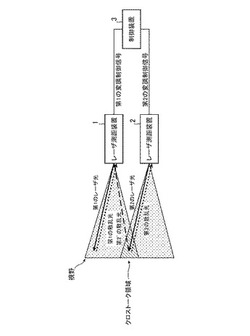
【課題】広視野な受信系においてクロストークによる誤りを回避する。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
(もっと読む)
光ビームスキャナ及びレーザレーダユニット

【課題】水平方向の広い角度を走査した場合においても垂直方向において変動の少ない光ビームスキャナを提供する。
【解決手段】光源と、前記光源からの光を走査する光スキャナと、前記光源より出射された光ビームを前記光スキャナに入射させるための入力光学系と、を有し、前記光スキャナは、回転軸を中心に回転する回転ミラーであって、前記光源より入射した光ビームを反射するミラーを有しており、前記回転ミラーが前記回転軸を中心に回転することにより、前記光ビームは、前記ミラーのミラー面において異なる位置に照射されるものであって、前記ミラーにおけるミラー面は、前記回転軸に垂直な面に平行な方向において、前記ミラーの一方の側から他方の側に向かって、前記回転軸に平行な方向に対するミラー面傾き角が徐々に増加していることを特徴とする光ビームスキャナを提供することにより上記課題を解決する。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
光学装置
【課題】光路上に配置した複数のミラーのうち角度ズレを生じたミラーを容易に特定できる光学装置を提供することを課題とする。
【解決手段】実施形態に係る光学装置は、光路上に配置した複数のミラーと、各ミラーを保持した複数のミラーホルダーと、各ミラーホルダーに設けられた反射面と、を有する。各反射面は、光路と直交する面に沿って各ミラーホルダーに取り付けられている。
(もっと読む)
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
走査形レーザ距離センサ装置
【課題】対象物の反射率が低い場合でも、確実にはみ出しを検知する走査形レーザ距離センサ装置を提供する。
【解決手段】パレットまでの距離をあらかじめRAM11に記憶する。車両を入庫し、入庫ボタン36を押すことにより、制御回路10は走査形レーザ装置を起動して反射物体までの距離を測定する。車両があるときの測定結果と、RAM11の記憶した距離とを比較し、異なる場合、検知信号を出力する。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
環境認識装置および環境認識方法
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
対象物識別装置及びプログラム
【課題】解像度が低下する遠方に存在する物体であっても、精度良く対象物か否かを識別する。
【解決手段】評価点群抽出部22で、レーザレーダ12により観測された観測データを取得して、観測データに基づいて、車両周辺の物体上の複数の点の各々を3次元空間に投影し、投影された点を点間距離に基づいてグループ化し、対象物の大きさに相当する大きさのグループに含まれる点群を評価点群として抽出する。特徴量算出部24で、抽出された評価点群の水平面内の分布の高さ方向の変化を示すスライス特徴量を算出し、識別情報記憶部26に記憶された識別情報と比較して、抽出された評価点群が示す物体が対象物か否かを識別する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
動体判別機能付き電子機器
【課題】測定対象物が動体であるか否かを正確に判別することができるコンパクトな動体判別機能付き電子機器を提供する。
【解決手段】動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
1 - 20 / 110
[ Back to top ]