
Fターム[5J084CA44]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 積分器 (105)
Fターム[5J084CA44]に分類される特許
1 - 20 / 105
撮像装置、撮像方法、及びプログラム
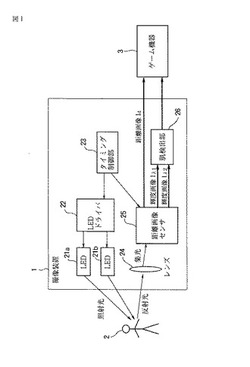
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
レーダ装置

【課題】一発測距方式及び積分測距方式で測距を行うレーダ装置において、測距方式の切り替えを状況に応じて的確に実施できるようにする。
【解決手段】一発測距方式による測距と積分測距方式による測距とを並行して実施し、一発測距方式による第1測距値D1、積分測距方式による第2測距値D2と共に、受信信号のパルス幅を表す強度パラメータPを取得し(S110)、強度パラメータPが判定閾値Pthより大きければ(S120−YES)、第1測距値D1を距離情報として選択し(S130)、強度パラメータPが判定閾値Pth以下であれば(S120−NO)、第2測距値D2を距離情報として選択する(S140)。このように受信信号の信号強度ではなく、反射光の強度と相関を有する強度パラメータP(受信信号Rのパルス幅)を用いているため、受信信号Rが飽和している場合でも、反射光の強度を正しく把握することができ、その結果、その時々の状況に応じた測距値の選択を的確に行うことができる。
(もっと読む)
測距装置
【課題】送信波を反射した物標から到来する反射波を、より高精度に検出することが可能な測距装置を提供する。
【解決手段】測距装置では、測定周期Tcyclを表す周期信号を発生させ、この周期信号に同期してN個のパルス信号からなる送信タイミング信号STを発生させることで、レーザ光を送信する。なお、各パルス信号は、当該装置の最大検知距離をレーザ光が往復するのに要する時間より充分に長い時間間隔Twで出力される。そして、AD変換器32が、N個のパルス信号のそれぞれについて所定のサンプリング間隔で信号をサンプリングし、加算部33aが、時間間隔Twのうち複数の計測期間Tsおよび送信前期間Tbの間、各送信波の送信タイミングを基準として同一時間にサンプリングされたサンプリング値同士を加算する。そして、測距部33が、複数の送信前期間Tbのサンプリング値の全てを参照してレーザ光の反射波の検出に必要な検出閾値を設定する。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
人体検知センサ及び自動水栓
【課題】検知性能と省エネルギー性能とを両立した人体検知センサを提供すること。
【解決手段】発光部25が投射した光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、発光部25による発光動作、及び撮像部26による受光動作を制御する撮像制御手段311と、反射光を受光したラインセンサ261の特定の画素の受光量の時間的な変化量が所定の閾値以上であるか否かを判定する第1の判定手段321と、第1の判定手段321が肯定的に判定したときに、ラインセンサ261に対する反射光の入射位置に応じて被検知対象の有無を判定する第2の判定手段322と、を備えている。
(もっと読む)
レーザレーダ装置
【課題】 スキャン周期を必要に応じて制御可能なレーザレーダ装置を提供する。
【解決手段】 近距離ターゲットが有るか否かを判断し(S150)、近距離ターゲットがある場合(S150:YES)、測距時間要因を変更設定する(S160)。具体的には、通常時よりも、レーザ光の出射間隔である「発光間隔」を短くし、また、同一探査領域からの反射光の「受光回数」を減らすようにする。そして、設定された測距時間要因で測距を行い(S100)、ターゲットの位置を取得し(S110)、ターゲットの速度を算出して(S120)、データを更新する(S130)。つまり、非可動の配光器を用いて探査領域へ並行してレーザ光を照射するようにし、レーザ光の出射間隔及び反射光の受光回数を変更することで、探査に要する時間を変更する。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
歩行者検出装置
【課題】検出点群から歩行者を高精度に検出する歩行者検出装置を提供することを課題とする。
【解決手段】検出手段によって検出された検出点を複数の検出点群としてグループ化し、それらの検出点群D4から歩行者を検出する歩行者検出装置であって、検出点群D4毎に検出点群D4の移動方向(速度ベクトルD5の方向に相当)を検出する移動方向算出手段S5と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7を算出する分布情報算出手段S7と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7の時間変化に周期性があるか否かを判定し、周期性がある検出点群を歩行者と判定する判定手段S9とを備えることを特徴とする。
(もっと読む)
移動体方向検知装置
【課題】移動体の方向を更に正確に2次元的に検知する移動体方向検知装置を提供する。
【解決手段】所定時間間隔をおいて周波数の異なる複数のパルスレーザ光を移動体に向けて照射し、移動体及びその背景からの反射光を受光する直線状のスリットに対して垂直方向に往復駆動されるマスクと、このマスクを通過した光を分光し、2次元に配列された複数の光センサ素子から成り、分光された光を受ける2次元センサと、スリットの行方向の各波長の光の強度累計値を求め、背景からの光から識別できるパルスレーザ光の反射光を検知し、マスクの往復駆動の方向と直角な方向の2次元センサにおける光センサ素子の列の受光強度の累積値によりパルスレーザ光の波長の強度の最大な列を求め、求められた強度最大列及び検知された反射光の最も強度の大きい累積値が得られるマスクの往復の位置及びこの往復の方向に対して垂直な2次元センサの位置により移動体の方向を検知する。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
マルチライダーシステム
【課題】本発明の目的課題は、従来のライダーシステムよりも広範囲の計測を可能とし、更には乱気流の突入時に使用する機体の動揺低減用気流情報を短い周期で計測する方法並びにその機能を備えた装置を提供することにある。
【解決手段】本発明のマルチライダーシステムは、レーザ光を利用したドップラーライダー方式の光学式遠隔気流計測装置を相対位置固定の関係で二組以上装備し、各装置から同波長のレーザを放射させると共に散乱光を各装置で受信する機能を備え、不具合に対する冗長性を向上させるとともに、各々の計測信号の積分量を増加させることにより信号対雑音比を向上させるものとした。
(もっと読む)
レーザレーダ装置
【課題】高速処理が可能なレーザレーダ装置を提供できる。
【解決手段】前方に出射したレーザ光に対して反射光の光量が所定値より小さい領域においては光走査速度を標準値より下げて検出を行い、反射光の光量が所定値より大きい領域においては光走査速度を標準値より上げて検出を行う。領域においては光走査速度が標準値より遅くなっているため、ある同じ角度範囲幅においての反射光の積算回数を、角度分解能を下げることなく基準回数より増加させることができる。これにより、歩行者など反射光量の小さい物体を感度よく検出することができる。一方、反射光の光量が大きい領域においては、光走査速度が標準値より速くし、ある同じ角度範囲幅においてのパルスの積算回数は基準回数より少なくするが、元々十分な反射光量が得られているため問題なく正確な距離・方向の検出は可能である。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
時間計測装置および距離計測装置
【課題】簡易な構成で高精度の時間計測を行うことができる時間計測装置を提供する。
【解決手段】時間計測装置10は、定電流源11,制御部12,演算部13,容量素子C1〜C3,抵抗器R,スイッチSW0〜SW3,SW11〜SW13を備える。制御部12は、発光タイミング信号および受光タイミング信号を入力し、tacoff信号,tac1信号,tac2信号,tac3信号,reset1信号,reset2信号,reset3信号を生成して各スイッチへ与え、スイッチの開閉動作を制御する。演算部13は、スイッチSW1と容量素子C1との接続点の電位Vout1、スイッチSW2と容量素子C2との接続点の電位Vout2、および、スイッチSW3と容量素子C3との接続点の電位Vout3を入力して、電位Vout1〜Vout3に基づいて演算を行う。
(もっと読む)
センサー系及びその動作方法
【課題】受光面積、受光量、感度、光電荷の伝送効率、正確度を向上し、チップ上の占有面積を低減できるセンサー系を提供する。
【解決手段】本センサー系は、半導体基板上に形成され、それぞれが、第1フォトゲートと第2フォトゲートとを含む複数のフォトゲート対と、半導体基板内に形成された第1共有フローティングディフュージョン領域と、半導体基板上に形成された複数の第1伝送トランジスタと、を含む。複数の第1伝送トランジスタのそれぞれは、第1制御信号に応答して、複数のフォトゲート対のそれぞれの第1フォトゲート下に形成された複数の電荷を第1共有フローティングディフュージョン領域に伝送する。
(もっと読む)
1 - 20 / 105
[ Back to top ]