
Fターム[5J084CA65]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 画像データ (253)
Fターム[5J084CA65]に分類される特許
1 - 20 / 253
無人走行体を用いた環境情報の取得システム
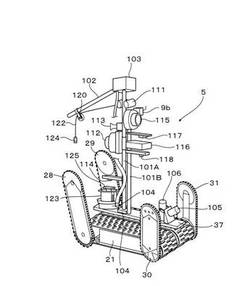
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
車両ドア開閉の検知装置および検知方法

【課題】駅ホーム側だけで入線・停車した電車の車両ドアの開閉状態を検知することができ、外乱光や車両汚れの影響を受けず、高い検知精度で車両ドアの開閉状態に係る情報を取得でき、さらに、旅客の乗降状態および混雑状態を考慮して高い精度で車両ドアの開閉状態を検知できる車両ドア開閉の検知装置および検知方法を提供する。
【解決手段】この車両ドア開閉検知装置13は、駅ホーム11に停車した電車14の車両ドア15の開閉状態を検知する装置であり、乗降口41付近の車両床面42を含む範囲を測距対象範囲18と設定して駅ホーム側に設置された距離画像センサ21と、距離画像センサが取得した三次元距離画像44,45に基づいて車両ドアの開閉状態を判断する車両ドア開閉判断手段32とを備えている。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
移動物体検出装置、移動物体検出プログラム、移動物体検出方法および飛行物体
【課題】人工衛星や航空機などから撮像して得られる光学画像を用いて移動物体の速度ベクトルを算出できるようにすることを目的とする。
【解決手段】検出装置記憶部290は、移動物体が存在する第一領域と第二領域とを撮像した第一領域画像と第二領域画像とを記憶する。検出装置記憶部290は、第一領域と第二領域との所定のずれ量に相当する画素数をずれ量固定値292として予め記憶する。ずれ量算出部220は、第一領域画像と第二領域画像とに対して相関演算を行って画像のずれ量をずれ量算出値221として算出する。ずれ量訂正部230は、ずれ量算出値221からずれ量固定値292を差し引いてずれ量訂正値231を算出する。速度ベクトル情報生成部240は、ずれ量訂正値231に基づいて移動物体の速度ベクトルを表す速度ベクトル情報241を生成する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
光学装置
【課題】光路上に配置した複数のミラーのうち角度ズレを生じたミラーを容易に特定できる光学装置を提供することを課題とする。
【解決手段】実施形態に係る光学装置は、光路上に配置した複数のミラーと、各ミラーを保持した複数のミラーホルダーと、各ミラーホルダーに設けられた反射面と、を有する。各反射面は、光路と直交する面に沿って各ミラーホルダーに取り付けられている。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
侵入検出装置及びロボットシステム
【課題】撮像部によって上方から撮像して侵入物を検出する場合、検出範囲の形が円錐形となり、検出範囲がそれだけ狭くなってしまう問題が生じる。
【解決手段】作業が行われる領域を含む作業面1と、作業面1に設けられた識別領域3と、識別領域3に対向する位置に設けられた反射鏡4と、反射鏡4を介して識別領域3を撮像する撮像部5と、撮像された識別領域3の画像に基づいて、識別領域3に侵入した侵入物を検出する侵入物検出部と、を有する。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
障害物検出方法及び障害物検出装置
【課題】レーザ光の照射効率を向上させるとともに、垂直方向の分解能を向上させることができる障害物検出方法及び障害物検出装置を提供する。
【解決手段】レーザ光を投受光するレーザレーダ1を設置する設置工程(SP101)と、監視範囲Aに向かってレーザ光を照射して監視範囲Aの位置を特定する監視範囲位置特定工程(SP102)と、レーザレーダ1の俯角φ0を調整する俯角調整工程(SP103)と、監視範囲Aにおける垂直走査角度の最小値φminを算出する最小値算出工程(SP104)と、監視範囲Aにおける垂直走査角度の最大値φmaxを算出する最大値算出工程(SP105)と、垂直走査角度の最小値φmin及び最大値φmaxに基づいてレーザレーダ1の垂直画角Δφを設定する垂直画角設定工程(SP106)と、を有し、垂直画角Δφの範囲内でレーザ光を垂直方向に走査させて障害物Tを検出する。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
目標検出装置、目標検出方法、目標検出プログラム
【課題】処理に負担がかからず、目標を確実に検出できるようにした目標検出装置を提供する。
【解決手段】LADARセンサ101は、画素毎に距離情報を取得する。LADARセンサ101から取得された隣接画素の距離差を演算し、隣接画素間の距離が急激に変化している部分を検出して物体を判定する。この判定された物体と、目標形状テンプレートとを比較して、目標物体の検出を行う。目標形状テンプレートは実寸の情報であり、LADARセンサ101からの距離情報を基に、目標形状テンプレートの実寸の情報を画素数の情報に換算し、判定された物体の画素数と、換算された目標形状テンプレートの画素数とを比較して目標物体の検出を行う。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
1 - 20 / 253
[ Back to top ]