
Fターム[5J084CA69]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | スイッチング回路 (108)
Fターム[5J084CA69]に分類される特許
1 - 20 / 108
レーザレーダ装置
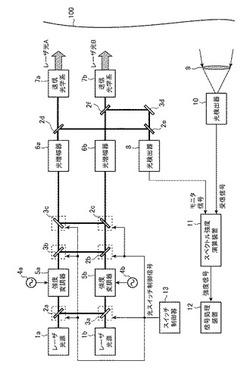
【課題】装置内における伝送効率を自動で校正することのできるレーザレーダ装置を得る。
【解決手段】光検出器8は、送信光学系7a、7bからの出射光のパワーに相当するモニタ信号を出力する。光検出器10は、測定媒質100を通過した光を受信し、その値に対応した受信信号を出力する。信号処理装置12は、送信光学系7a、7bからの出射光に対する光検出器10の結合効率を示す値に基づいて、吸収波長の大きい光の振幅または電力と吸収波長の小さい光の振幅または電力とを補正し、その差異から測定媒質100に対する光学的厚みを測定する。
(もっと読む)
レーザースキャンセンサ

【課題】警戒エリア設定後に自動車などが進入して駐車されたり新たに無害な障害物が設置されたりした場合であっても、本来検知すべき侵入者を的確に検知可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、設置状態情報と測定方向毎の検知エリア情報とを記憶するメモリ160と、取得された距離データから、前記検知エリア情報との比較によって判明する侵入または移動した物体のうちで人体に対応する可能性がある部分を抽出するとともに、そうして抽出された各抽出部分の時系列での移動状況に基づき、所定時間内の移動距離が所定距離内である前記抽出部分を除外した上で、残りの前記各抽出部分が人体であるか否かをそれぞれ判定する人体判定部140と、前記検知エリア情報を所定条件下で更新する検知エリア情報更新部140と、警告出力制御部150とを備える。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
車載レーザレーダ装置
【課題】検知すべき範囲内に存在する物標に関する物標情報を効率良く求めることが可能な車載レーザレーダ装置を提供する。
【解決手段】操舵角度センサによってステアリングの操舵角度が取得されると、レーザ光を一括して照射し該レーザ光の反射光を受光した受光信号に基づいて、測距部20が検知実行範囲に存在している検知対象物との距離を表す距離データを測距ユニット毎に求める。そして、制御部30は、測距部20にて求められた距離情報に従って検知対象物に関する情報を生成する。ここで、制御部30は、取得された操舵角度に基づいて距離情報の提供元となる測距IC21の一部を選択することで、検知実行範囲を設定する。
(もっと読む)
光波距離計
【課題】発光量調節に機械的駆動を用いず、かつ光量調節作業を繰り返すことなく受光光量が最適に調整される光波距離計を提供する。
【解決手段】所定の固定抵抗値を持つ抵抗器を抵抗値大から小にかけて複数設けて、演算処理部において、受光信号振幅を見ながらそのうちの一を光送出手段に選択的に負荷する構成とした。演算処理部において、信号変換手段に入力される受光信号振幅が、最大入力値以上と判定された場合には、最大入力値未満となるまで現段階の発光量より小さい発光量に下げるように信号選択を繰り返し、最大入力値以上と判定された場合には、最大入力値を超えない最大の発光量となるまで現発光量より大きい発光量に上げるように信号選択を繰り返すことで、断続的な複数パターンの発光量の中から最適な発光量が決定され、その信号選択回数は最大でも用意した抵抗器数と同じ回数で済み、光量調節作業が大幅に早くなる。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
光波距離計
【課題】電気部品等の温度位相ドリフトや受光部(電気回路)を異にすることで生じる原因不明な位相ドリフトによる測距値誤差を大幅に低減した光波距離計を提供する。
【解決手段】2つの発光素子6,8と、2つの受光素子40,60と受光素子40に接続された第1の受光部300と受光素子60に接続された第2の受光部400と発光素子6,8の発光を切り換える発光切換手段4と第2の受光部400を経た信号を帰還して安定状態で再出力するPLL制御回路100と、を備える。発光素子6,8を択一発光させ、発光素子6,8,受光素子40,60等の温度位相ドリフト及び受光部300,400(電気回路)が異なることによる位相ドリフトを含む信号を故意にPLL制御回路100の整調用信号として用い周波数変換器48,68に入力することで、測距信号と参照信号の位相差をとると、既知の固定位相ドリフトのみが残り、原因不明な位相ドリフトは除去される。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
ビーム照射装置
【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
時間振幅変換装置
【課題】TAC方式の複数の時間振幅変換回路を用いた構成において、素子の電気的特性のばらつきの影響を小さくすることができる時間振幅変換装置を提供する。
【解決手段】差動増幅回路8は、非反転側の入力端子と反転側の入力端子との入力電圧の差分を検出し、その検出した差分に利得Aを乗算した電圧を出力する。調整用トランジスタ9のゲート端子には、差動増幅回路8の出力端子が接続されている。調整用トランジスタ9は、入力電圧にトランスコンダクタンスgmを乗算した電流を出力する。S/H回路7−b,7−c、差動増幅回路8及び調整用トランジスタ9は、校正部をなしている。制御信号入力端子11〜13には、時間振幅変換回路10の回路動作を制御するための制御部としての制御回路が接続されている。
(もっと読む)
光走査装置、レーザレーダ装置及び光走査方法
【課題】複数の走査角および空間分解能を設定することができる光走査装置を、小型かつ簡便な構成で実現する。
【解決手段】光走査装置12は、複数の光源で構成される光源装置20と、光源数に対応した数の光偏向素子から構成される光偏向素子22と、各光偏向素子に個別に対応した、異なる拡大率を有する走査角およびビーム広がり角の複数の拡大レンズ系26とから構成されている。いずれかの拡大レンズ系と、これに対応した光偏向素子及び光源を選択することにより、複数の走査角および空間分解能を設定することができる。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
受信回路、及びレーザレーダ装置
【課題】加算処理によって生じるSN比の低下を防ぐことができ、より適切にSN比の改善を図ることができる受信回路、及びレーザレーダ装置を提供する。
【解決手段】比較器4A,4Bは、それぞれ増幅器2A,2Bから出力される信号振幅の変動状況を監視している。比較器4A,4Bは、閾値電圧と、増幅器2A,2Bから出力された信号の電圧とを比較する。比較器4A,4Bは、それぞれ増幅器2A,2Bから出力された信号の電圧が閾値電圧よりも高い場合には、HIGHレベルの信号をスイッチ3A,3Bへ出力し、増幅器2A,2Bと加算回路5とを電気的に繋ぐ。他方、比較器4A,4Bは、それぞれ増幅器2A,2Bから出力された信号の電圧が閾値電圧よりも低い場合には、LOWレベルの信号をスイッチ3A,3Bへ出力し、増幅器2A,2Bと加算回路5とを電気的に分離する。
(もっと読む)
1 - 20 / 108
[ Back to top ]