
Fターム[5J084CA72]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | フィードバック (78)
Fターム[5J084CA72]に分類される特許
1 - 20 / 78
光走査装置及びレーザレーダ装置
【課題】精度高く正確に走査光の走査量を測定することができるとともに、小型化が可能で、かつ安価な光走査装置、及びレーザレーダ装置を提供する。
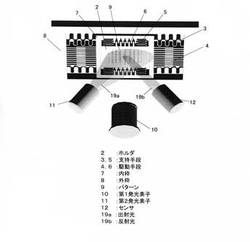
【解決手段】 光学素子1と、ホルダ2と、ホルダ2を移動可能に支持する支持手段3,5と、ホルダ2を光学素子1の光軸に垂直な方向に移動させる駆動手段4,6と、光学素子1を透過する第1の波長の光を発光する第1発光素子10、及び光学素子1を透過しない第2の波長の光を発光する第2発光素子11からなる発光素子を備え、
ホルダ2に、第2の波長の光を透過しない構造体からなるパターン9が形成され、
第2の発光波長を感知するセンサ12をさらに備え、
センサ12は、反射された光を受光可能な位置に配置され、かつ第1発光素子10と、第2発光素子11と、センサ12とが、相対的に固定された位置に配置されていることを特徴とする光走査装置、及びレーザレーダ装置。
(もっと読む)
光走査装置

【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
光波距離計
【課題】発光量調節に機械的駆動を用いず、かつ光量調節作業を繰り返すことなく受光光量が最適に調整される光波距離計を提供する。
【解決手段】所定の固定抵抗値を持つ抵抗器を抵抗値大から小にかけて複数設けて、演算処理部において、受光信号振幅を見ながらそのうちの一を光送出手段に選択的に負荷する構成とした。演算処理部において、信号変換手段に入力される受光信号振幅が、最大入力値以上と判定された場合には、最大入力値未満となるまで現段階の発光量より小さい発光量に下げるように信号選択を繰り返し、最大入力値以上と判定された場合には、最大入力値を超えない最大の発光量となるまで現発光量より大きい発光量に上げるように信号選択を繰り返すことで、断続的な複数パターンの発光量の中から最適な発光量が決定され、その信号選択回数は最大でも用意した抵抗器数と同じ回数で済み、光量調節作業が大幅に早くなる。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム
【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
レーザレーダ装置と出射調整方法
【課題】天候の急変にも即時に追随して人体に障害を与えることなく位置計測が可能なレーザレーダ装置を提供することが目的である。
【解決手段】天候の急変にも即時に追随して、対象物31での第一のレーザ光12Aおよび第二のレーザ光12Bの強度を所定の強度以下になるように、前記第一のレーザ光12Aおよび前記第二のレーザ光12Bの出射強度を調整するレーザレーダ装置1と出射調整方法を提供する。
(もっと読む)
距離計
【課題】対象物までの距離を非接触式的に測定するための測定装置において、測定の正確性を向上させ、その動的領域を広げる。
【解決手段】対象物までの距離を非接触式に測定するための携帯式距離計であって、ハウジング10と、光学測定光1を使用し走時測定に基づき、対象物までの距離を非接触的に測定可能である測定器とを備え、この測定器は、光源ユニットと、光学素子を有する光学ユニットとを備え、光学ユニットは、投光・受光用光学系、測定光を対象物へと投光するための投光路、および対象物から反射/散乱した測定光を受けるための受光路を有する。さらに、投光路に影響する光学素子が初期位置から可動であり、動作センサが、ハウジングの動作を測定中に把握するように構成されており、可動光学素子は、ハウジング震揺動作の補償下で投光路が空間的確定位置に固定されるように、初期位置から可変補償位置へと移動する。
(もっと読む)
ビーム照射装置
【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
ビーム照射装置
【課題】光検出器からの信号に基づいて検出されたサーボ光の受光位置と理想の受光位置との差分に、迷光や電気的ノイズ等による外乱成分が含まれる場合にも、適正に、レーザ光を目標領域において走査させ得るビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315からの検出信号に基づいて取得されたサーボ光の受光位置と、理想の受光位置との差分を示す差分信号に基づいて、レーザ光が目標領域上の目標軌道を追従するよう、ミラーアクチュエータ100を制御する。また、マイコン7は、差分信号に外乱成分が含まれるエラー期間を検出し、検出したエラー期間において、差分信号に応じて前記レーザ光を前記目標軌道に追従させる制御を停止させる。
(もっと読む)
測距装置、測距方法、及びそのプログラム
【課題】被写体の測距の高精度化を図ることができる測距装置、測距方法、及びそのプログラムを提供する。
【解決手段】測距装置は、光を発光する光源と、前記光源により発光されて、被写体で反射された反射光を撮像する撮像部と、前記撮像部が撮像することにより得られた画素の画素値を、被写体までの距離を示す距離情報に変換する距離情報変換部と、前記距離情報に基づいて第1の撮像条件を設定する撮像条件設定部と、前記光源及び前記撮像部を制御して、前記第1の撮像条件で前記被写体を撮像させる撮像制御部と、を備える。
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 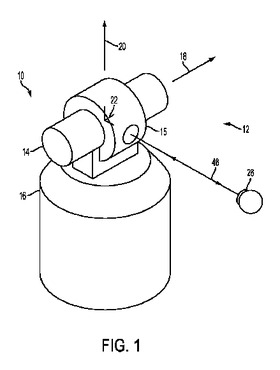 (もっと読む)
(もっと読む)
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
画像撮像装置
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
1 - 20 / 78
[ Back to top ]