
Fターム[5J084CA77]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | その他の回路要素 (23)
Fターム[5J084CA77]に分類される特許
1 - 20 / 23
時間振幅変換装置
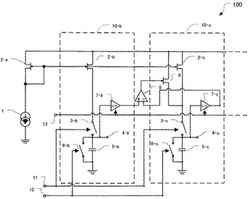
【課題】TAC方式の複数の時間振幅変換回路を用いた構成において、素子の電気的特性のばらつきの影響を小さくすることができる時間振幅変換装置を提供する。
【解決手段】差動増幅回路8は、非反転側の入力端子と反転側の入力端子との入力電圧の差分を検出し、その検出した差分に利得Aを乗算した電圧を出力する。調整用トランジスタ9のゲート端子には、差動増幅回路8の出力端子が接続されている。調整用トランジスタ9は、入力電圧にトランスコンダクタンスgmを乗算した電流を出力する。S/H回路7−b,7−c、差動増幅回路8及び調整用トランジスタ9は、校正部をなしている。制御信号入力端子11〜13には、時間振幅変換回路10の回路動作を制御するための制御部としての制御回路が接続されている。
(もっと読む)
距離測定装置

【課題】プリズム測定、ノンプリズム測定を簡便に行うことができる距離測定装置、更に測距光軸とプリズム光軸との間にずれを生じた場合でも、簡便な方法で誤差を生じない様にした距離測定装置の少なくとも一方を提供する。
【解決手段】測距光を発する発光部13と、測定対象物からの反射測距光と、前記発光部から発せられる測距光を内部参照光として受光する受光部14と、該受光部の受光感度を電気的に調整する感度調整部23と、該受光部からの前記反射測距光の受光信号と前記内部参照光の受光信号に基づき測距を演算する制御演算部22とを具備し、該制御演算部はプリズムモード測定と、ノンプリズムモード測定とを選択して距離測定可能であり、選択された測定モードに対応して前記感度調整部により前記受光部の受光感度を変更する様制御する。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
レーザ測距装置
【課題】パルスのレーザ光を送信して目標物で反射したレーザ光を受信し、送信から受信までの経過時間から目標物までの距離を算出するレーザ測距装置において、より効率的な測距処理を可能にしたレーザ測距装置を提供する。
【解決手段】パルス毎に受信信号の最大ピーク値と送信から最大ピーク値に達するまでの時間をサンプリング周期の周期数として測定し、複数回の受信信号の最大ピーク値をそれぞれカウントした周期数が同じ数同士で積分し、最大の積算値が存在する周期数を導出し、この導出した周期数に相当する時間から目標物までの距離を演算する。最大ピーク値及び周期数の測定には高速に応答可能なアナログ回路を用いる。
(もっと読む)
レーザレンジセンサのタイムスタンプ機能付加装置
【課題】本発明は、光を走査させ、その反射光を検出することにより、走査範囲にある測定対象物までの距離を測定するレーザレンジセンサにタイムスタンプ機能を付加するタイムスタンプ機能付加装置に関し、レーザレンジセンサに高精度のタイムスタンプ機能を容易に追加することができるレーザレンジセンサのタイムスタンプ機能付加装置を提供することを目的とする。
【解決手段】光を走査させ、その反射光を検出することにより、走査範囲にある測定対象物までの距離を測定するレーザレンジセンサで測定された測定データにタイムスタンプ情報を付加するタイムスタンプ情報機能装置であって、レーザレンジセンサに取り付けられ、レーザレンジセンサから出射される光を検出し、検出信号を出力する検出部と、レーザレンジセンサに取り付けられ、検出部から出力された検出信号に基づいてレーザレンジセンサにタイムスタンプ機能を追加するアタッチメント本体とを含む構成とされている。
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
光学的測離計
【課題】少ない較正工数の正確な測量を可能とする。
【解決手段】光学的距離計は、監視空間に測定光を送出する発光部、監視空間にある対象物により反射又は再発射された測定光を受光する受光部2、その出力信号から測定光の通過時間を決定しそれから対象物の距離を算出する評価ユニットを備えている。受光部2と評価回路との間には、これらと電気的に接続されているPINダイオード回路200,300が設けられており、PINダイオード回路200,300が受光部2の電流出力信号を減衰する。
(もっと読む)
光学式変位センサ
【課題】 センサヘッドと専用のデータ処理装置(アンプユニット)の接続が可能であるとともに、専用のデータ処理装置を切り離したセンサヘッド単体でも汎用のデータ処理装置に容易に接続可能な光学式変位センサを提供することを目的とする。
【解決手段】 センサヘッド3は汎用インターフェース5を介して専用のデータ処理装置(アンプユニット)7だけでなく汎用のデータ処理装置8にも接続可能であるように設けられているので、センサヘッド3と専用のデータ処理装置7の接続だけでなく、専用のデータ処理装置7と切り離したセンサヘッド3単体でも汎用インターフェース5を用いて汎用のデータ処理装置8に容易に接続でき、センサヘッド3単体から汎用のデータ処理装置8へ受光データまたは変位データを出力するという簡易な接続が可能となる。
(もっと読む)
距離計測装置
【課題】レーザ光の照射により対象物までの距離を測定する距離計測装置において、受信信号のレベルがピーク値となる時刻に最も近いサンプリングクロックの特定を目的とした回路を単純化し消費電流を削減する。
【解決手段】基準クロックに対してNとおりの遅延時間のサンプリングクロックを発生する。測距対象物からの受信信号をコンパレータにより参照電圧と比較しながらコード化して保持し、各サンプリングしたデータ間で順次大小比較を行う。比較結果の大小遷移状態切り替わり検出により、ピークレベルが保持されたレジスタを割り出し、そのときまでの比較回数が直近の基準クロックの立上りからピーク値受信時刻までの時間を示すとする。
(もっと読む)
侵入者検知システム
侵入者検知システムは、変調信号によって変調された被変調光信号で視野を照明する照明手段と、遅延反射信号を受信する光受信器と、変調信号と受信された遅延反射信号との間で相互相関関数を計算する相互相関器と、侵入者検知を行うため使用される相互相関関数の変化を検知する手段と、を備える。本システムは、侵入者検知信号が取得されるようにする光センシングおよび相互相関計算を使用する。これは、侵入者を検知するため固体、低コストかつ高信頼性のセンサを提供することを可能にさせる。 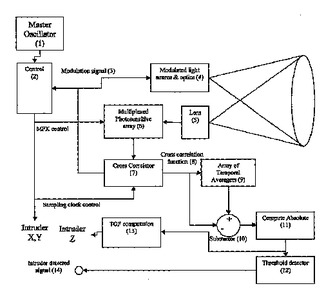 (もっと読む)
(もっと読む)
車両用レーダ装置
【課題】反射強度が低下した先行車両の検知可能距離の低下を抑制し、かつ、光学設計上の制約を少なくする。
【解決手段】距離検出を行うときには発光体140での発光を行わず、受光素子82に入射される光の強度に応じた受光信号が得られるようにし、距離検出を行わないときには発光体140での発光を行い、受光素子82における受光信号成分が一定値となるようにする。これにより、距離検出を行わないときの受光信号の波形から、一定値となる受光信号成分を差し引けば、ノイズ成分のみが残ることになる。そして、このときに得られるノイズ成分をバックグランドノイズ算出回路99で求めることにより、受光信号からノイズ成分を除去することが可能となる。これにより、レーダ装置の検知可能距離が低下することを防ぐことが可能となり、光学設計上の制約も少なくすることが可能となる。
(もっと読む)
受光素子の感度制御方法、強度変調光を用いた空間情報の検出装置
【課題】感光部とは別領域にスイッチ領域および記憶領域を設ける従来構成に比較して簡単な構造とし、従来構成よりも受光素子の開口率を大きくする。
【解決手段】不純物を添加した半導体層11の主表面に絶縁膜12を介して複数個の制御電極13が配置される。半導体層11に光が入射すると半導体層11に電荷が生成され、制御電極13に制御電圧を印加しておけば、制御電極13に対応して形成されるポテンシャル井戸14に電荷が集積される。制御電圧を変化させると、ポテンシャル井戸14が受光面に占める面積が変化する。ポテンシャル井戸14に集積された電荷は信号電荷として外部に取り出されるから、制御電圧を印加する制御電極13の個数を変化させることにより、受光素子1の感度を実質的に変化させたことになる。
(もっと読む)
光電センサ
【課題】 信号に含まれるノイズ成分を抑圧して、検出精度に優れる光電センサを提供することを目的とする。
【解決手段】 光電センサ10は投光部11、受光部20、差動増幅回路30、信号処理部40等を備える。信号処理部40は、差動増幅回路30から出力された差動信号Saを増幅し、同信号に含まれるノイズ成分を除去するものであるが、これをバンドパスフィルタ回路41、整流回路43、ローパスフィルタ回路45から構成している。バンドパスフィルタ回路では、主として外乱光に起因するノイズ成分が除去される。その後、バンドパスフィルタ回路41から出力された差動信号Sbは整流回路43で整流される。整流信号Seは、ローパスフィルタ回路45に入力される。このように、整流回路43で信号成分を直流成分に変えた後に、ローパスフィルタ回路45に入力させているから、信号成分それ自体を抑圧させることなく、ノイズ成分だけを抑圧出来る。
(もっと読む)
レーダ装置
【課題】 他者との混信を抑制し、低コスト化を図ることができるレーザ装置を提供すること。
【解決手段】 計測用信号を所定のPN符号に基づいた発信条件にて発信制御する発信制御手段1,2と、計測用信号を発信する出力手段1dと、を備えたレーダ装置であって、計測用信号の発信条件をランダムに設定する発信条件設定手段3を備えた。
(もっと読む)
ビーム照射装置
【課題】 簡単な構成にて円滑にスキャン位置の制御を行い得るビーム照射装置を提供する。
【解決手段】 レンズの上下左右方向に静電容量型の変位センサーを配する。上下方向駆動時に、静電容量が飽和容量Ca、Cbに達したタイミングの駆動電流Ia、Ibを検出する。そして、次式から、上下方向の中立位置に位置づけるための駆動電流Iymと、単位駆動電流あたりにおける上下方向のレンズシフト量Δydを求める。
Iym=(Ia+Ib)/2
Δyd=(Da+Db)/(Ia−Ib)
同様に左右方向の駆動電流Izmおよびレンズシフト量Δzdを求める。求めた駆動電流Iym、Izm、レンズシフト量Δyd、Δzdをもとに目標領域に対する各方向の駆動電流を設定する。これにより、レーザ光を目標領域に正確に照射できる。
(もっと読む)
検出装置
【課題】 走行方向変化時、高速走行時および障害物検出時に、障害物の検出とその状態の監視を適正かつ円滑に行う。
【解決手段】 スキャン制御ルーチン10aは、走行方向および走行速度に関する外部信号と、距離測定ルーチン10bからの障害物検出結果およびそれまでの距離に関する信号をもとに、レーザ光のスキャン軌跡を制御する。たとえば、右折時には、走行方向中心軸から右折方向に偏った部分のスキャン頻度が高められるスキャン軌跡を設定する。また、高速走行時には、走行方向中心部分のスキャン頻度が高められるスキャン軌跡を設定する。さらに、障害物が閾値距離よりも接近する位置に検出されたときには、障害物近傍のスキャン頻度が高められるスキャン軌跡を設定する。これにより、走行方向変化時、高速走行時および障害物検出時において、障害物の検出とその状態の監視が適正かつ円滑に行われる。
(もっと読む)
光伝送システムおよび光伝送方法
【課題】ターゲットに対して照射するレーザ光の照射精度を向上させると共に、光伝送システム全体の小型軽量化を図る。
【解決手段】光伝送システム10は、航空機等の飛翔体に設置される基台11と、この基台11上にアジマス方向に回動自在に支持されるシステム本体12とから構成される。 基台11は、アジマス方向回動軸受13と、光発生・送出装置14と、光軸補正データ生成手段15とを備える。 アジマス方向回動軸受13には、メインレーザ光mおよびガイドレーザ光gを導光する軸孔13aが設けられる。 光発生・送出装置14は、メインレーザmを生成する。 光軸補正データ生成手段15は、光検出器20と画像処理装置21と、光軸補正処理装置22とを備えている。
(もっと読む)
光電センサ
【課題】 測定対象物の検出距離の変化に対して感度調整ボリュームの回転角を線形に変化させて感度調整を容易化した光電センサを提供する。
【解決手段】 感度調整ボリューム15が所定角度で回転されたときの可変抵抗器14の電圧を検出し、この検出電圧に基づき、測定対象物Mの検出距離の変化に対する感度調整ボリューム15の回転角度の変化が線形となるように、検出電圧の変化に対する増幅率の変化を検出距離に応じて非線形化する演算を行ない、この演算結果に基づき増幅率の特性を変更する制御を行なうので、検出距離の変化に線形に変化できるボリューム調整が可能となり、感度調整を容易化できる。
(もっと読む)
光子検知子モジュールと像映装置。
【課題】
レンジ解像度を達成するのに必要な回路速度と密度、レーザーエコーにおけるピコ秒の飛走相違に基づいた小さなターゲット表面変動を明示するのに必要な感度とを具えたレーダー像映システムを提供する。
【解決手段】
ターゲットからの光子反射を発生する光子源と、光子反射に反応して検知子アレイ出力信号を生成する検知子アレイと、検知子アレイ出力信号を受信する積層処理モジュールとを有してなり、処理モジュールが少なくとも2個の積層を有し、各積層が受信検知子アレイ出力信号処理のための少なくとも1個の集積回路チップを有している。
(もっと読む)
光センサおよび測距方法
【課題】良好な精度と応答性を両立した光センサおよび測距方法を提供する。
【解決手段】測定の基準となる基準距離を予め設定し、物体までの距離がその基準距離よりも近いか遠いかを判定する。また、基準距離を段階的に切り替えながら上記判定処理を繰り返して、物体の存在領域を絞り込むことによって、物体までの距離を測定する。このような処理であれば、受光信号全体を詳細にサンプリングせずとも、十分な精度の判定結果を得ることができる。
(もっと読む)
1 - 20 / 23
[ Back to top ]