
Fターム[5K048BA48]の内容
選択的呼出装置(遠隔制御・遠隔測定用) (47,350) | 用途 (7,681) | 移動体 (526) | 無人車のもの (27)
Fターム[5K048BA48]に分類される特許
1 - 20 / 27
遠隔操縦車両システム
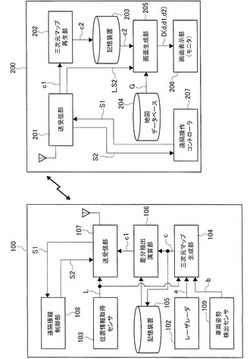
【課題】通信データ量を軽減して、遠隔操作部での表示遅れを防止する。
【解決手段】遠隔操縦車両100では、点群高さデータaと位置情報Lを基に、三次元マップ生成部104が三次元マップデータcを順次生成して出力する。差分抽出演算部106は、最新の三次元マップデータcと、一つ前の三次元マップデータcとの差分演算をして差分三次元マップデータc1を出力する。差分三次元マップデータc1と位置情報Lは、送受信部107から無線送信され、遠隔操作部200の送受信部201で受信される。差分三次元マップデータc1は、三次元マップ再生部202で順次加算されて再生三次元マップデータc2となる。画面生成部205では、記憶装置203に記憶された再生三次元マップデータc2と、地図データベース204から取り出した地図画面データGとを合成して表示画像データdを生成する。モニタ206には表示画像データdが表示される。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】簡単かつ安価な構成で、無人走行体の活動範囲を延長可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】LANケーブル1を介して接続された第1及び第2の操作卓2,3と、第1操作卓2から出力される制御信号により遠隔操縦される有線無人走行体4と、第2操作卓3から出力される制御信号により遠隔操縦される無線無人走行体5と、第2操作卓3と有線無人走行体4とを接続する通信ケーブル6,7と、通信ケーブル6と通信ケーブル7との間に配置された無線中継装置8と、有線無人走行体4と無線無人走行体5とを接続する無線通信装置9と、通信ケーブル6を巻回したケーブルリール10とをもって、無人走行体の遠隔操縦システムを構成する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても鮮明な環境情報を取得可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、前方監視用の光学カメラ(メインカメラ)113を搭載する。また、安全な場所には、遠隔操縦装置305を備えた制御装置本体301を設置する。制御装置本体301は、遠隔操縦装置305の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データを1走査毎に、制御装置本体301に接続されたUSBメモリ306に記憶する。また、光学カメラ113の撮影映像もUSBメモリ306に記憶する。
(もっと読む)
遠隔操作装置及び方法
【課題】無線品質の悪化に対処可能な遠隔操作装置を提供すること。
【解決手段】本発明の一特徴は、コントローラにより無線制御される自走可能な遠隔操作装置であって、前記コントローラとの無線通信の無線品質を測定する無線品質測定部と、当該遠隔操作装置の位置を測定する位置測定部と、前記測定された無線品質と当該遠隔操作装置の位置とを関連付け、各位置における測定された無線品質を示す無線品質マップを生成する無線品質マップ生成部と、前記コントローラとの無線通信の無線品質の良否を示す所定の条件を判定することによって、前記無線通信の無線品質が悪化したことを検出する無線品質悪化検出部と、前記無線品質が悪化したことが検出されると、前記無線品質マップを参照して所定の無線品質以上の移動先を特定し、前記移動先に当該遠隔操作装置を移動させるよう制御する走行制御部とを有する遠隔操作装置に関する。
(もっと読む)
遠隔操作装置
【課題】人の片方の掌で把持された状態で、当該掌で操作して所望の指令信号を入力できる遠隔操作装置を提供する。
【解決手段】移動体を遠隔操作するための遠隔操作装置10であって、移動体の移動方向、移動速度、および加減速度の少なくともいずれかについての指令を入力可能なジョイスティック3と、入力された前記指令を移動体へ送信する送信部5と、ジョイスティックおよび前記送信部が設けられた本体7と、を備える。本体7の形状および寸法は、該本体が人の片方の掌で把持された状態で、該掌の親指でジョイスティック3が操作可能となるように設定されている。
(もっと読む)
農作業機の無線操作システム
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
リモコン集材機製造方法
【課題】リモコン集材機制御装置を提供する。連結システム構造の伝導駆動機を決定とした一連が維持でき、作業を迅速に行うことが可能なことから作業性・能率性・効率性・生産性の向上を提供する。
【解決手段】トラブルによる作動停止や危険極まりない作業条件を安心・安全しかも、一人の集中操作で省力化を図り、リモコン操縦作業性・能率性・効率性・生産性の向上が得られる。
(もっと読む)
作業機械デモセンタのディスプレイ表示システム
【課題】作業機械の動作と映写される画像とを容易に一致させることができる等の効果が得られるシステムを提供しようとする。
【解決手段】複数の作業機械1〜4に搭載される撮像手段1a,2a,3a,4aと、前記撮像手段1a,2a,3a,4aで撮像した画像を画像信号として送信させる画像送信手段1b,2b,3b,4bと、作業機械1〜4を観覧する場所に掲示されるディスプレイ5と、前記画像送信手段1b,2b,3b,4bから送信された画像信号を受信しディスプレイ5に出力する画像受信手段6と、任意の作業機械の撮像手段1a,2a,3a,4aからの画像信号を、前記ディスプレイ5に表示するものとして選択指令出力をすることのできる選択手段7と、該選択手段7により、任意の画像信号を選択する出力がされた場合、その出力の対象となった画像送信手段に、その画像信号の送信を指令すると同時に、選択されない他の画像送信手段に、それらの画像信号の送信を遮断する指令をそれぞれ出力する制御手段8とからなる。
(もっと読む)
遠隔操縦システム
【課題】移動体と遠隔操縦装置を備えた遠隔操縦システムにおいて、移動体の遠隔操縦性を高める。
【解決手段】オンボードカメラ14を搭載した無人車両Bと、画像を表示する表示部33、及び遠隔操縦するための操作部36を備えた遠隔操縦装置Cを有する遠隔操縦システムにおいて、遠隔操縦装置Cが、受信処理手段31aとデータ処理手段31cとの間に、受信処理手段31aからのデータを蓄積し且つデータ処理手段31cへ出力するデータを所定時間遅延させるFIFOバッファメモリ31bを備えた構成としたことにより、無人車両Bからのデータの受信遅れ時間に変化が生じた場合でも、表示部33の画像が急激に変化するような事態を防いで、無人車両Bの遠隔操縦性の向上を実現した。
(もっと読む)
位置別受信感度のデータの収集及び処理装置及び方法
【課題】夜間走行などに活用される無人ロボットの経路計画時に通信可能性或いは自己位置追跡可能性に基づいて無人ロボットの位置別受信感度のデータを収集して処理する装置及び方法を提供する。
【解決手段】位置別受信感度のデータの収集/処理装置は、位置別受信感度のデータの収集及び処理装置であって、無人ロボットと、前記無人ロボットの位置別にGPSデータを無線通信より受信し、前記GPSデータの受信感度のデータを計算する無線基地局と、前記位置別GPSデータ及び無線通信受信の感度のデータを用いて前記無人ロボットの経路計画又はチャネルコーディングを行う遠隔制御部とを含む。本発明によれば、GPS受信座標に該当する無人ロボットの位置別に無線通信の受信感度のデータを格納し、これを用いて夜間走行などに活用される無人ロボットの経路計画を行うことができるので、無人ロボットの自律走行又はロボットの監視モニタリングが可能なようにすることができる。
(もっと読む)
接点信号伝送システム
【課題】通信異常の発生をユーザが早期に発見できるようにした接点信号伝送システムを提供する。
【解決手段】伝送子機2は、搬送台車6を制御する個別制御用PLC4の入出力接点端子に接続され、個別制御用PCL4との間で接点信号の授受を行う。伝送親機1は、全体制御用PLC3との間で通信を行う第1通信部11と、伝送子機2との間で通信を行う第2通信部12と、第1通信部11が受信したデータを第2通信部12から対応する伝送子機2に送信させるとともに、第2通信部12が受信したデータを第1通信部11から全体制御用PLC3に送信させる制御部14とを備える。制御部14は、第2通信部12と伝送子機2との間の通信での異常の有無を監視し、通信異常を検出すると通信異常を報知するための報知信号を第1通信部11から外部装置(全体制御用PLC3)に出力させている。
(もっと読む)
管理装置および災害情報取得システム
【課題】災害が発生し、災害地での情報収集が決められた際、無人機を迅速に出動させられるようにする。
【解決手段】災害検出装置120は災害を検知したとき管理装置140に災害検出信号101を出力する。管理装置140は無人飛行機110に発信前処理の命令信号を出力する。保管状態の無人飛行機110はカタパルト130上に配置されカタパルト端子131と接続している。無人飛行機110はカタパルト端子131から管理装置140の命令信号を受けて発進前処理を実行する。発進前処理において、無人飛行機110はバッテリーを充電し、自律飛行用の測位センサを初期化する。システム運用者が無人飛行機110を災害地に発進させる必要があると判断したとき、既に発進前処理が行われているため、無人飛行機110は直ちに災害地に向けて発進し、災害地の情報を収集することができる。
(もっと読む)
遠隔操作装置及び遠隔操作方法
【課題】移動装置を遠隔操作する遠隔操作装置において、移動装置に取付けたカメラにより撮像した映像データの良好な圧縮処理を可能とし、操作者が注視していない範囲に障害物があった場合にも検知を容易とし、構造及び制御の複雑化を防止し、移動装置が旋回や高速走行を行う場合にも対応できるようにする。
【解決手段】移動装置101に取付けたカメラ2より出力された映像データを圧縮して送出する圧縮処理部3と、圧縮処理部3から送られた映像データを受信し操作部1のモニタ5に表示する映像データ処理部4とを備え、圧縮処理部3は、カメラ2により撮像された映像をメッシュ状に複数の領域に分解し、移動装置101の移動状態に応じた所定の領域を算出し、この領域の映像データを所定の圧縮率により圧縮する、または優先的に映像データ処理部へ送出し、この領域以外の映像データをより高い圧縮率によって圧縮する、またはフレームレートを下げる。
(もっと読む)
周辺状況捕捉システムの信号中継伝送方法及び中継器ユニット
【課題】手間とコストをできるだけ抑制し、その上で、実情や法規制に即した柔軟な運用が可能となるようにすること。
【解決手段】有人操作地点1から監視地点5,7の無人走行車9,11を遠隔操作するための制御信号と、無人走行車9,11上の監視カメラ9cで撮影された監視地点5,7の周辺の画像を有人操作地点1に通知するための監視画像信号とを、有人操作地点1と監視地点5,7との間に設定される中継地点13,15,17において中継して、有人操作地点1と監視地点5,7の無人走行車9,11との間で無線を用いて伝送する際、有人操作地点1から監視地点5,7に向けて、中継地点13,15,17をもれなく経由して無人走行車9,11を移動させ、経由した中継地点13,15,17において無人走行車9,11から中継器ユニット19,21,23を降ろして設置させる。
(もっと読む)
遠隔監視システム
【課題】 監視員が把握していない異常記録を容易に確認できる遠隔監視システムの提供。
【解決手段】監視センタは、移動ロボットに自動的に復旧処理を実行させる自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに受信した異常信号の情報と、その他の動作モードであるときに受信した異常信号の情報とを区別可能にセンタ記憶部に記憶する記憶制御手段と、モード設定手段にて動作モードが自動復旧モードからその他のモードへ設定されると、自動復旧モードであるときに記憶された異常信号の情報からなる異常履歴又は該異常履歴を表示するためのダイアログを表示部に表示する履歴表示手段とを有する。
(もっと読む)
遠隔操縦作業機の画像処理システム
【課題】無線により遠隔操縦が可能な遠隔操縦作業機において、簡素な構成で、対象地形と作業機との位置関係を容易かつ正確に把握することができるようにした、遠隔操縦作業機の画像処理システムを提供する。
【解決手段】無線信号で遠隔操縦される作業機の画像処理システムにおいて、該作業機の絶対位置を計測する第1GPS受信手段1aと、該作業機の姿勢を計測する第1姿勢計測手段2aと、該作業機とは別設され周囲の対象地形の形状を計測する地形計測装置3と、地形計測装置3の絶対位置を計測する第2GPS受信手段1bと、地形計測装置3の姿勢を計測する第2姿勢計測手段2bと、該作業機の絶対位置及び姿勢に基づいて該作業機の三次元形状を演算する作業機演算手段4と、地形計測装置3の絶対位置及び姿勢に基づいて該対象地形の三次元形状を演算する地形演算手段5と、該対象地形及び該作業機の三次元形状を重畳表示する表示手段6とを備える。
(もっと読む)
遠隔操作移動体
【課題】操作端末によって遠隔操作される遠隔操作移動体において、無線通信切断時に、通信復旧を行うことが可能な遠隔操作移動体を提供する。
【解決手段】移動機構120を具備し、操作端末によって遠隔操作される遠隔操作移動体1であって、移動機構120を制御する移動制御部102と、遠隔操作移動体1の移動の履歴を示す移動履歴情報を記憶する移動履歴記憶部151と、操作端末と無線通信を行うとともに、無線通信の切断を検出する通信制御部103とを備え、移動制御部102は、無線通信の切断が検出された場合、無線通信を復旧するため、移動履歴情報に基づき、遠隔操作移動体1の走行経路を逆に辿るよう移動機構120を制御する。
(もっと読む)
リモート操作端末、車両
【課題】リモート操作中に停止操作が必要な状況下で、速やかに車両の走行又は動作を停止させることができるリモート操作端末及び車両を提供すること。
【解決手段】上記課題を解決するため、本発明は、ボタン2Aの操作により車両3をリモート操作するリモート操作端末2において、車両3を停止するための停止ボタン2Bを有し、停止ボタン2B以外のボタン2Aの操作に基づき、車両3へ停止信号を送信する停止信号送信出手段14、15を有することを特徴とする。
(もっと読む)
作業車輌の遠隔操作システム
【課題】携帯電話機の局番に対応させて設定した作業車輌しか遠隔操作できないものとして、混信による作業車輌の暴走を防いで安全性を向上させると共に、作業車輌の盗難を防ぐ。
【解決手段】携帯電話機40と作業車輌A側の制御装置とを電話回線または電話回線とインターネットとを介して接続可能に構成すると共に、該携帯電話40の操作に基づいて作業車輌A側の制御装置から走行変速装置又は操向制御装置又はエンジン制御部又は作業装置昇降制御部へ出力するように構成する。
(もっと読む)
1 - 20 / 27
[ Back to top ]