
Fターム[5L096AA09]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 3次元画像 (415)
Fターム[5L096AA09]に分類される特許
1 - 20 / 415
位置姿勢計測装置、その処理方法及びプログラム
通過車両検知装置
物体判別方法
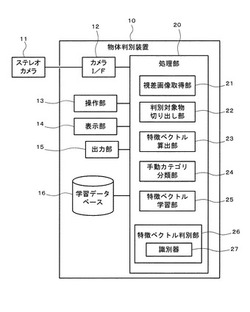
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
対象検知方法及び対象検知システム

【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
3次元データ映像の階段認識方法
【課題】3次元データ映像から階段の蹴上げ面及び踏み面を検出して、階段を認識する3次元データ映像の階段認識方法を提供する。
【解決手段】3次元データ映像の階段認識方法は、映像獲得部が、階段が位置する空間の3次元データ映像を獲得する段階と、映像処理部が、前記3次元データ映像から前記階段の連続する両踏み面の間の高さを計算し、前記計算された高さによって、前記連続する両踏み面の間に位置する各ポイントを判断し、前記連続する両踏み面の間に位置する各ポイントを通じて、前記連続する両踏み面の間に位置する蹴上げ面を検出する段階と、前記3次元データ映像から前記階段の連続する両蹴上げ面の間の幅を計算し、前記計算された幅によって、前記連続する両蹴上げ面の間に位置する各ポイントを判断し、前記連続する両蹴上げ面の間に位置する各ポイントを通じて、前記連続する両蹴上げ面の間に位置する踏み面を検出する段階とを含む。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、特徴箇所の減少を防ぐことができる画像マッチング装置を提供する。
【解決手段】入力したクエリ画像群と、予め保存されている検索対象画像とのそれぞれから特徴箇所を抽出し、抽出した特徴箇所毎に局所記述子を算出して特徴データとして出力する特徴表現手段と、クエリ画像群の特徴データを統合し、統合結果特徴データとして出力する特徴統合手段と、統合結果特徴データと、検索対象画像の特徴データとの間で各々の特徴箇所の局所記述子のベクトル間距離値に基づくスコア値を算出し、クエリ画像の特徴箇所に対応する検索対象画像のスコア値に基づきマッチング画像を出力する照合手段とを備えた。
(もっと読む)
物体座標系変換行列推定成否判定装置および物体座標系変換行列推定成否判定方法ならびにそのプログラム
【課題】物体座標系変換装置において算出された物体座標系変換行列の精度を定量化し、推定成否を判定する物体座標系変換行列推定成否判定装置を提供する。
【解決手段】物体座標系変換行列推定成否判定装置1は、入力した情報により、物体座標系変換行列の推定精度を定量化したスコアを用いて物体座標系変換行列推定の成否を判定し、成否信号を出力する。
(もっと読む)
自車移動推定方法および自車移動推定プログラム
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
目標物を検出するための映像処理方法及び装置
【課題】ステレオカメラなどから獲得した映像の深さ情報のみを用いて目標物領域である手領域を抽出する方法を提供する。
【解決手段】映像の深さ情報を獲得する映像獲得部、映像の深さ情報に対するヒストグラムを生成するヒストグラム生成部、上記映像から検出対象の領域を検出するための深さ情報のしきい値を設定するしきい値設定部、上記設定された深さ情報のしきい値を用いて検出対象の領域を抽出するイメージ処理部、上記抽出された検出対象の領域が目標物に対応するか否かを検証するデータ検証部、及び上記抽出された検出対象の領域を格納する格納部を含み、映像の深さ情報を用いて目標物を検出できるようにする。
(もっと読む)
映像処理方法及び装置
【課題】深さ情報のみを用いて被写体を検出するに当たって、演算処理速度を高める。
【解決手段】映像処理方法は、映像の深さ情報を獲得するステップと、前記映像から目標物が存在する領域に対する第1関心領域を分離するステップと、前記第1関心領域から目標物に対する候補領域を検出するステップと、前記検出された候補領域が目標物に対応するか否かを判断するステップと、前記候補領域が目標物に対応する場合、前記候補領域を用いて目標領域を検出するステップと、前記検出した目標領域を用いて目標物の姿勢を推定するステップと、前記目標物をモデリングするステップと、を含む。
(もっと読む)
顔印象判定チャート
【課題】被験者の顔形状を客観的かつ簡易に評価することを可能にする。
【解決手段】顔印象判定チャート10は、人の頭部形状に関する高次の基底ベクトルの少なくとも一つの重み係数が互いに異なる第一の頭部画像20および第二の頭部画像30が対比可能に配置されている。顔印象判定チャート10を参照して被験者の顔形状を目視観察することにより、被験者の顔に発現している基底ベクトルの次数とその発現度合いを定量的に把握することが可能である。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
立体画像表示装置
【課題】従来の方式では、最前面と最背面の視差の値の単純な差分や、その時間的な累積値のみで立体映像の安全性や快適性を判定しているため、現実的に快適に視聴できるにもかかわらず、快適でないという誤った評価結果が出力される場合があった。
【解決手段】本発明は、立体画像を構成する左眼用画像と右眼用画像とを取得し、立体画像の視差角分布を取得し、当該視差角分布に基づいて立体画像の見やすさを評価する構成を有するものである。当該構成を有することによって、立体画像の安全性や快適性に関してより適切な評価結果を出力することが可能になる。
(もっと読む)
被写体3次元領域推定方法およびプログラム
【課題】同期撮影された複数のカメラ映像を統合的に扱うことで、被写体3次元位置推定の精度を向上させる。
【解決手段】初期フレームにおける被写体の3次元世界座標と、複数のカメラで撮影された複数フレームのカメラ画像とから、前記初期フレームにおける被写体の3次元世界座標を特定平面上のXY座標に射影し、前記特定平面上の被写体のXY座標を時間軸情報に基づき推定し、前記特定平面上の被写体のXY座標をカメラ間情報に基づき評価することで、後続フレームにおける被写体の3次元世界座標を推定する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
1 - 20 / 415
[ Back to top ]