
Fターム[5L096AA13]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | その他の分析対象画像 (17)
Fターム[5L096AA13]に分類される特許
1 - 17 / 17
ジェスチャ認識装置
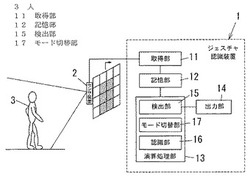
【課題】ジェスチャの認識開始の合図を必要とせず、ジェスチャの認識処理が行われる期間を制限することができるジェスチャ認識装置を提供する。
【解決手段】検出部15は、検知範囲内の人3の存否を検出する人検出モードと、人3の身体の特定部位の位置を検出するジェスチャ検出モードとの2つの動作モードを有している。モード切替部17は、検出部15が人検出モードで動作中に人3の存在を検出すると、検出部15の動作モードをジェスチャ検出モードに切り替え、その時点での取得画像を参照画像として比較データ用領域に記憶する。検出部15は、ジェスチャ検出モードで動作中には、取得部11にて定期的に取得される取得画像と、記憶部12の比較データ用領域に記憶されている参照画像との差を検出する背景差分法により、人3の身体の特定部位の位置を時系列的に検出する。
(もっと読む)
紙片識別システム、紙片識別装置

【課題】 紙片を高精度に識別する,紙片登録・識別装置および方法を提供する。
【解決手段】 紙片登録装置と紙片識別装置とからなる紙片識別システムにおいて、紙片登録装置は、紙片から特徴量を抽出する第1の特徴量抽処理出部と、第1の特徴量抽出処理部により抽出された特徴量に関する情報を紙片に印刷する印刷部とを有し、紙片識別装置は、紙片から特徴量を抽出する第2の特徴量抽処理出部と、紙片から前記印刷部により紙片に印刷された特徴量に関する情報を取得する特徴量取得部と、特徴量に関する情報から特徴量を抽出する特徴量復号化部と、特徴量復号化部により抽出された特徴量と第2の特徴量抽出部により抽出された特徴量との類似度を判定する類似度計算部とを有する。
(もっと読む)
IRイメージングシステムを介して得られるIR画像における総人数の決定方法
【課題】周囲背景から人を分離する。
【解決手段】IRイメージングシステムを用いて得られるIR画像内の人の数を決定するための新規システム及び方法は、特別に構成された輝度比セットを介して周囲背景から人を分離する。これらの比から導出される量及びしきい値は、IR画像内の1つのピクセルが人からのものか、人以外からのものかを選択的に分類するために使用される。人数は、IR画像内の様々なピクセルの分類を基礎として決定される。
(もっと読む)
画像認識装置
【課題】検知対象物を検知する性能が向上した画像認識装置の提供。
【解決手段】赤外線カメラ10によって生成される前方画像50から、前方領域に存在する歩行者を表す画像50aを検知する画像認識装置100である。赤外線カメラ10は、前方領域の明るさに応じてカメラゲインを変更することによりコントラストの調整された前方画像50を生成する。そのため、画像認識装置100は、複数群のサンプル画像61a〜63aのコントラストに応じて作成された複数の事前学習モデル31〜33を記憶するデータベース30と、当該カメラゲインに対応する事前学習モデル31〜33をデータベース30に記憶された複数の事前学習モデル31〜33から選択する最適モデル選択部27と、選択された事前学習モデル34に基づいて前方画像50から歩行者を表す画像50aを検知する歩行者認識部21と、を備える。
(もっと読む)
撮像装置
【課題】太陽光が直接照射される地表付近や海上付近において、遠距離被写体の撮像位置が短時間に不規則に変化することを補正する撮像装置を提供する。
【解決手段】水平走査に同期した水平走査より短い時間、LEDまたはLDを用いた光源から出力された所定の波長帯の光を目標物体に照射し、照射された所定の波長帯の光による目標物体からの反射光を、画面一斉の水平走査に同期した電子シャッタ露光で撮像し、撮像された映像について、前記近赤外光の画面の輪郭成分と可視光画面の輪郭成分との相関を検出し、画面各部の往復分と片道分の差から片道分の地表大気の揺らぎ成分の移動ベクトルを検出し、可視光映像の画面各部ごとに片道分の地表大気の揺らぎの移動ベクトルを補正する。
(もっと読む)
ハイパースペクトル画像を解析するための方法および装置
少なくとも2つの波長で一連の画像を作成することができる少なくとも1つのセンサ(1)と、2状態による分類関係に応じて画像の画素を分類することができる計算手段(2)であって、その画像はセンサ(1)から受け取られる、計算手段(2)と、計算手段(2)から受け取るデータを処理することに由来する少なくとも1つの画像を表示することができる表示手段(3)とを含む、ハイパースペクトル画像を解析するための装置。計算手段(2)は、センサ(1)からデータを受け取る、トレーニング画素を決定するための手段(4)と、ハイパースペクトル画像のスペクトルの自動細断を行うことができる射影追跡を計算するための手段(5)と、大きなマージンの分離を作り出すための手段(6)とを含む。計算手段(2)は、分類済み画素が識別可能なデータを作成することができる。 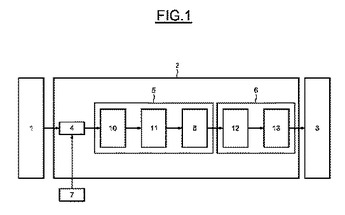 (もっと読む)
(もっと読む)
画像処理装置および方法、学習装置および方法、並びに、プログラム
【課題】より高い精度で画像のボケ具合を検出する。
【解決手段】エッジマップ作成部311は、所定の大きさのブロック単位で画像のエッジ強度を検出する。演算パラメータ調整部313は、エッジ強度の最大値と最小値の差であるダイナミックレンジに基づいて、画像のボケ具合の検出に用いる画素であるエッジポイントの抽出に用いるエッジ基準値を設定する。エッジポイント抽出部315は、エッジ強度がエッジ基準値以上、かつ、ブロック内の画素の画素値が所定の範囲内のブロックであるエッジブロックに含まれる画素をエッジポイントとして抽出する。本発明は、例えば、画像のボケ具合を検出する画像処理装置に適用できる。
(もっと読む)
画像計測装置、画像計測方法及びプログラム
【課題】計測対象物の画像データに基づいて当該計測対象物の測定を行うに当たり、自動的に最適なエッジ抽出法が適用される構成を提供することを目的とする。
【解決手段】画像データに、当該画像の撮像に係る所定の撮像条件データを添付しておき、当該画像データに基づいて前記計測対象物の計測を行うために計測対象物の輪郭に対応するエッジを抽出する際、当該画像データに添付された撮像条件データに基づいて当該画像データについて適用するエッジ抽出方法を決定するようにした。
(もっと読む)
地表変化判別装置及び地表変化判別プログラム
【課題】該当地域の地表の変化を高速に精度良く解析する。
【解決手段】特異地表情報検出手段103は新規に得た該当地域の特異領域を算出し、特異地表情報検出手段203は事前に得た該当地域の特異領域を算出し、位置補正手段105は算出された新規に得た該当地域の特異領域及び事前に得た該当地域の特異領域に基づき新規に得た該当地域の地表情報と事前に得た該当地域の地表情報との位置合わせを行い、地表情報差分検出手段107は位置合わせが行われた新規に得た該当地域の地表情報と事前に得た該当地域の地表情報との差分を検出し、地表情報変化評価手段109は検出された差分について実際に発生した地表情報の変化であるか否かを評価する。
(もっと読む)
映像監視装置及び方法
【課題】本発明は、監視カメラ1台の映像を用いて監視エリアに凹凸が存在する場合でも正確に動物体を判定することができる映像監視装置及び方法を提供することを目的とするものである。
【解決手段】装置本体1には、装置全体の制御に関する情報処理を行う制御部10、撮影された映像の画像処理を行う画像処理部11を備えており、距離データ算出部10aは、異なる2つの位置で撮影された2つの背景画像データを用い両者の視差を利用して公知の方法により背景画像の距離を算出し、距離テーブル14aとして記憶する。動物体サイズ算出部10bは、異物抽出部11aで抽出された異物及び距離テーブル14aの距離データに基づいて動物体のサイズを算出する。そして、判別部10cは、算出された動物体のサイズを基準データと比較して監視対象物体であるか否か判別する。
(もっと読む)
画像評価装置及び画像評価装置の校正方法
【課題】校正作業を簡易に行うことができる画像評価装置及び画像評価装置の校正方法を提供する。
【解決手段】照明装置22より記録用紙12に照射された光の透過光又は反射光の光量をNDフィルタ70により所定の割合だけ変化させ、当該変化させる前後において当該受光した光の光量に応じたレベルの信号に基づいて導出される画質を評価するための評価値の変化量がHDD52に予め記憶されている変化量となるようにCCDラインセンサ24より出力される信号のレベルを補正する。
(もっと読む)
データ処理装置
【課題】より少ない計算量でマッチング精度の向上を図る。
【解決手段】本ステレオ画像処理装置では、1フレームの基準画像において、処理対象とする4×4の相関元領域から左右に1画素分ずらした2つの参照領域につきそれぞれ相関演算が行われ、相関値Sn-1,Sn+1が算出され、これら相関値のうち相関のより弱いことを示すものが評価値とされる(ステップ2)。この評価値が所定のしきい値と比較されることによって、処理対象としている相関元領域について自己相関が強いか否かが判定される(ステップ3)。この判定の結果自己相関が強い場合に(ステップ3にてNo)、マッチングサイズを拡大させるよう設定される(ステップ5)。
(もっと読む)
粒子画像処理方法と装置およびそのプログラム
【課題】粒子画像から粒子の特徴情報を精度よく求めること。
【解決手段】粒子を撮像する工程と、撮像して得られた複数の画素からなる多階調画像に対して構成画素数を増やす補間処理を行う工程と、補間処理された補間画像に基づいて粒子の特徴を表す情報を求める工程とを有する粒子画像処理方法。
(もっと読む)
4次元ラベリング装置、N次元ラベリング装置、4次元空間フィルタ装置およびN次元空間フィルタ装置
【課題】時間的に変化する3次元画像からなる4次元画像またはN(≧4)種の独立なパラメータを基底とするN次元画像に対して、4次元連続領域またはN次元連続領域を検出する。また、4次元空間フィルタまたはN次元空間フィルタを重畳し、画質を変換する。
【解決手段】4次元画像を4次元走査する際またはN次元画像をN次元走査する際に、走査中の注目画素を中心に3次元空間または「N−1」次元空間での連続性を見ると同時に時間軸またはN次元軸での連続性を見て、連続している4次元領域またはN次元領域には同一のラベル番号を付ける。また、走査中の注目画素の値および近傍局所領域の値との関係で定まる処理に基づいて注目画素の値を変換する。
【効果】4次元ラベリングまたはN次元ラベリングが実現できる。また、所望の画質変換を実現できる。
(もっと読む)
距離画像を用いた人体検知方法および人体検知装置
【課題】距離画像を用いた人体検知方法および人体検知装置を提供する。
【解決手段】人体検知部20は、距離画像センサ10から得た距離画像を構成する複数の画素から、画素値が閾値以下となる画素領域を抽出する領域抽出処理を、閾値を画素値が最短の画素の画素値から段階的に伸ばして複数回行う。そして、人体検知部20は、領域抽出処理を行う毎に、新たに抽出された画素領域が、既に抽出された画素領域と部分的に重複する場合は、部分的に重複する複数の画素領域を同一の物体と判断して、複数の画素領域の全体に同一の識別子を割り当てる識別子割当処理を行い、同一の識別子を割り当てた複数の画素領域の画素数が人体の大きさに相当する画素数を超えるという判定条件が成立すると、領域抽出処理および識別子割当処理を終了し、同一の識別子が割り当てられた画素領域を人体として抽出する。
(もっと読む)
衛星データによる森林地域の植生分類方法
【課題】調査対象地域のバンドデータの季節変化を利用して、森林簿に沿って区分された調査対象樹種を抽出し、かつ、その分布領域を求めることにより広域的な植生図の作成をおこなうための衛星データによる森林地域の植生分類方法を提供する。
【解決手段】処理手順として、(1)調査対象樹種の解析適期を設定し、調査対象地域の一又は複数のバンドデータを取得する。(2)それぞれのバンドデータの輝度値に対し、樹種に応じた上下限値又は閾値を設定し、樹種数分の樹種対象抽出マップを作成する。
(3)調査対象地域の正規化植生指標を作成する。(4)上記(2)の樹種対象抽出マップについて、上記(3)の植生指標を用いてマスク処理を施すことにより、山林部又は樹種分布を特徴抽出する。(5)上記(2)又は上記(4)により作成した樹種対象抽出マップを段階的に組み合わせて比較又は合成することにより樹種ごとの純林分布を求める。
(もっと読む)
画像処理装置及び方法、並びに画像処理プログラムを供給するプログラム供給媒体
【課題】 ランレングス符号化されている画像を用いて演算処理を行うとき、メモリの無駄をなくし、処理時間を短縮する。
【解決手段】 繰り返し数を累積して行方向における各即値の座標値を求める行内座標累算手段22と、各即値が所定の条件を満足するか否かを判定する判定手段2と、判定手段2により所定の条件を満足すると判定された即値の座標値のうち即値の最小座標値を行毎に記憶する行内最小座標値記憶手段23と、所定の条件を満足すると判定された即値の座標値のうち行内座標累算手段22により求められた即値の最大座標値を行毎に記憶する行内最大座標値記憶手段24と、最小座標値及び最大座標値を用いて、有効と判定された即値からなる画像領域を包含する領域を示す領域情報を算出する画像領域算出手段2とを備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]