
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
1 - 20 / 1,053
物体検出装置、監視カメラ、及び物体検出方法
開閉眼検出装置
画像監視装置
情報処理方法、情報処理装置、および記憶媒体
移動方向識別装置
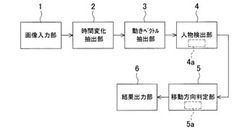
【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
物体検出装置

【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
顔画像認証装置
【課題】表情、顔の向きの変動等により本人認証をしにくい状況でも本人受理を確保することができる顔画像認証装置を提供する。
【解決手段】認証候補人物特定手段326は、類似度算出手段325によって算出された類似度に基づいて前記複数の登録人物から認証候補人物を特定する。検出率算出手段327は、顔追跡手段322によって追跡された直近の複数の顔領域画像に対する類似度が最高となったフレームの割合である登録人物検出率を、認証候補人物について計算する。認証閾値決定手段328は、顔領域画像に含まれる顔が認証候補人物として特定された登録人物の顔であるか否かを認証するための基準である認証閾値を、登録人物検出率に応じて決定する。認証判定手段329は、類似度が認証閾値を超えた認証候補人物を監視領域内の人物の顔であると判定する。
(もっと読む)
映像解析装置及びシステム
【課題】 多様な動的物体が現れるシーンを高速に解析する映像解析装置を提供する。
【解決手段】 入力された映像のフレーム画像102から、動的な物体が存在する領域を検出する動的物体領域検出部103と、この検出された動的物体領域検出部で検出された物体のカテゴリを判別する物体カテゴリ判別部104とを有し、この物体領域と物体カテゴリ判別部で判別されたカテゴリから、映像中の各座標において物体が現れる確率を表す「存在確率マップ」を生成し、それを時系列データで保存することで、一定のタイムスパンにおける各カテゴリの存在確率マップを生成する。
(もっと読む)
映像検出装置および映像検出方法並びに映像検出プログラム
【課題】所望の事象の進展を表す映像に類似した映像を高い精度で検出する映像検出装置および映像検出方法並びに映像検出プログラムを提供する。
【解決手段】所望の事象の進展を表す基準映像を保持する保持部と、前記基準映像に基づいて、当該基準映像における前記事象の進展の速度を含む複数の速度で前記事象の進展を表す複数の調整映像を生成する生成部と、蓄積装置に蓄積された各蓄積映像と、前記複数の調整映像のそれぞれとの類似度を評価する評価部と、前記評価部で得られた評価結果に基づいて、前記複数の調整映像のいずれかに類似する前記蓄積映像を、前記基準映像に類似する映像として取り出す検出部とを有する。
(もっと読む)
車両周辺監視装置
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
車両情報登録方法、車両情報登録装置、及び車両情報登録プログラム
【課題】車両のモデルチェンジに伴う照合情報の登録に係るシステム管理者等の負担を軽減する。
【解決手段】車両を撮像する撮像部から画像を取得し、前記画像から、車両名称を表すマークの形状に係る特徴量である車両名称特徴量と、車両の形状に係る特徴量である車両特徴量と、を抽出し、車両名称、車両名称特徴量、車両特徴量を含む標準車両情報を車両毎に記憶する記憶部から、前記画像から抽出された車両名称特徴量に対応する車両特徴量を前記記憶部から取得し、前記記憶部から取得された車両特徴量と前記画像から抽出された車両特徴量とを照合し、所定の条件を満たす場合に、前記記憶部から取得された車両名称と前記画像から抽出された車両特徴量とに基づいて、新規の標準車両情報を前記記憶部に記憶する、処理をコンピュータが実行する。
(もっと読む)
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム
【課題】 直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】 直線検出装置30は、撮像手段20で撮像された撮影画像22内のエッジ点23について、撮影画像に基づく球面画像40内の各エッジ点の対応点である対応エッジ点の球面勾配ベクトルを算出する勾配算出部34と、球面画像における直線投影面60の法線ベクトルnを表す極角θ及び方位角φで構成されるハフ空間70に、各対応エッジ点を含む直線投影面の法線ベクトルを投票する投票部35と、所定の閾値以上の投票数を有する法線ベクトルで規定される直線投影面を決定することで、撮影画像内の直線を特定する直線特定部36とを備える。投票部は、各対応委エッジ点の位置ベクトルと直交する法線ベクトルであって、法線ベクトルと対応エッジ点における球面勾配ベクトルとの内積が0より大きい法線ベクトルを投票する。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
対象物種別判定装置
【課題】対象物の種別判定に要する演算負荷の軽減及び種別判定時間の短縮を図ることができる対象物種別判定装置を提供する。
【解決手段】赤外線カメラ2Rにより撮像された撮像画像から対象物の対象物領域Rを抽出し、対象物領域R内の運動判断領域Pについての輝度プロファイルJnを作成する(STEP106)。現在よりΔT前に作成した輝度プロファイルJoをメモリから読出し、Jn,Joの特徴量の差異が所定値以上であるか否かを判定する。所定値以上の差異があれば、対象物は生体(例:歩行者)であると判定し(STEP110)、なければ、現在よりΔT/2前に作成した輝度プロファイルJhをメモリから読出し、Jn,Jhの特徴量の差異が所定値以上であるか否かを判定し、所定値以上の差異があれば、対象物は生体であると判定し、なければ、対象物は生体でないと判定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
危険検知装置及び危険検知方法
【課題】危険な状態を短時間で、かつ精度よく検知することが可能な危険検知装置を提供する。
【解決手段】位置情報取得手段101は、人物の身体上部の一点である計測点の位置情報を取得する。移動ベクトル算出手段102は、位置情報の変化を示す移動ベクトルを算出する。下降検出手段103は、移動ベクトルの垂直方向成分である垂直移動データに基づいて計測点の下降を検出する。反転検出手段104は、移動ベクトルの水平方向成分である水平移動データに基づいて計測点の反転を検出する。危険状態判定部105は、下降検出手段103が下降を検出し、かつ水平移動ベクトル反転検出手段104が反転を検出したとき、危険状態と判定する。出力部106は、危険状態判定部の判定結果に応じて危険情報を出力する。
(もっと読む)
迷子発見システム及び方法
【課題】多人数が来訪する場所等において、保護者などからの申告に依存することなく、迷子の発生を早期に検出し、その迷子に対応できるようにする。
【解決手段】各保護者について顔特徴情報を保持する保護者情報と、各子供についてその顔特徴情報と迷子度と保護者情報へのリンクとを有する子供情報と、を保持する保護者推定データベースを用いる。入場口での撮像データ内に写っている人物に関し、推定年齢に基づき子供とその保護者とに分類し、子供とその保護者とを対応付けて、保護者推定データベースに登録する。子供を含んでいる新たな撮像データに関し、保護者推定データベース内の子供情報を検索してその子供に対応する保護者の顔特徴情報を取得して撮像データとのマッチングを行うことにより、子供が保護者と一緒に写っているか否かを判別して子供の迷子度をアップまたはダウンし、迷子度がしきい値に達していればアラームを発生する。
(もっと読む)
1 - 20 / 1,053
[ Back to top ]