
Fターム[5L096CA05]の内容
Fターム[5L096CA05]に分類される特許
1 - 20 / 526
通過車両検知装置
人検出装置、人検出方法及び人検出プログラム
物体判別方法
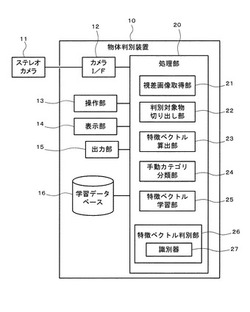
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
車外環境認識装置および車外環境認識方法

【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
画像処理装置、方法、及び画像表示装置
【課題】対象物の三次元位置を高精度で算出する。
【解決手段】実施形態の画像処理装置は、実施形態の画像処理装置は、第1取得部、第2取得部、第1設定部、第2設定部、第1算出部、及び第2算出部を備える。第1取得部は、対象物が複数の位置から撮像された複数の撮像画像を取得する。第2取得部は、前記対象物の仮三次元位置と、前記対象物の仮サイズを取得する。第1設定部は、実空間における前記仮三次元位置の近傍に少なくとも1つの探索候補点を設定する。第2設定部は、前記探索候補点を前記撮像画像に射影した射影位置毎に、前記対象物を探索するための探索窓であって、前記探索候補点の位置と前記仮サイズとに基づくサイズの前記探索窓を設定する。第1算出部は、前記探索窓内において、前記対象物が含まれるかどうかを示す評価値を算出する。第2算出部は、前記評価値に基づいて前記対象物の三次元位置を算出する。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
電子的に会話を評価するための方法およびシステム
【課題】会話の解析を自動的に支援する方法および機器を提供する。
【解決手段】本発明は、少なくとも2人の人の間の会話を電子的に評価するための方法に関し、ビデオデータを受けるステップと、会話中に2人の間で視覚的な相互作用が生じたか否かを決定するためにビデオデータを解析するステップと、眼の運動方向が同じモードであるか否かを決定するために2人の眼の運動を解析するステップとを備える。
(もっと読む)
自車移動推定方法および自車移動推定プログラム
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
目標物を検出するための映像処理方法及び装置
【課題】ステレオカメラなどから獲得した映像の深さ情報のみを用いて目標物領域である手領域を抽出する方法を提供する。
【解決手段】映像の深さ情報を獲得する映像獲得部、映像の深さ情報に対するヒストグラムを生成するヒストグラム生成部、上記映像から検出対象の領域を検出するための深さ情報のしきい値を設定するしきい値設定部、上記設定された深さ情報のしきい値を用いて検出対象の領域を抽出するイメージ処理部、上記抽出された検出対象の領域が目標物に対応するか否かを検証するデータ検証部、及び上記抽出された検出対象の領域を格納する格納部を含み、映像の深さ情報を用いて目標物を検出できるようにする。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
自動認識処理システム、情報処理端末、自動認識処理方法、及びプログラム
【課題】コストをかけずに、数多くの種類の対象物を精度よく自動認識することが可能な自動認識処理システム等を提供する。
【解決手段】撮影部25であるカメラを起動すると、情報処理端末3は発光体11の明滅周期をサーバ5から受信、設定し、対象物9の動画撮影を開始する。情報処理端末3は、前後の撮影画像31から差分画像32を生成してシンボル認識処理を行い、差分画像32内にシンボル候補が4点あるか判定する。シンボル認識処理の認識結果が成功すると、情報処理端末3は差分画像32から認識領域33を抽出し、サーバ5に送信する。サーバ5は、情報処理端末3から受信した認識領域33のデータベース照会処理を行う。情報処理端末3は、サーバ5からデータベース照会の結果を受信し、データの表示等を行う。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
迷子発見システム及び方法
【課題】多人数が来訪する場所等において、保護者などからの申告に依存することなく、迷子の発生を早期に検出し、その迷子に対応できるようにする。
【解決手段】各保護者について顔特徴情報を保持する保護者情報と、各子供についてその顔特徴情報と迷子度と保護者情報へのリンクとを有する子供情報と、を保持する保護者推定データベースを用いる。入場口での撮像データ内に写っている人物に関し、推定年齢に基づき子供とその保護者とに分類し、子供とその保護者とを対応付けて、保護者推定データベースに登録する。子供を含んでいる新たな撮像データに関し、保護者推定データベース内の子供情報を検索してその子供に対応する保護者の顔特徴情報を取得して撮像データとのマッチングを行うことにより、子供が保護者と一緒に写っているか否かを判別して子供の迷子度をアップまたはダウンし、迷子度がしきい値に達していればアラームを発生する。
(もっと読む)
モバイルモーションキャプチャカメラ
【課題】複数の俳優を収容することのできるボリューム内で身体動作と顔動作を共に同時に取り込むことを可能にするモーションキャプチャシステムを提供する。
【解決手段】動作を取り込むシステム(10)は、少なくとも1つの移動物体上の複数の地点を定義するマーカを有する少なくとも1つの移動物体を含むように構成されたモーションキャプチャボリューム(30)と、モーションキャプチャボリューム(30)内で可動となるように構成された少なくとも1つのモバイルキャプチャカメラ(16)と、少なくとも1つのモバイルモーションキャプチャカメラ(16)と結合され、少なくとも1つの移動物体の運動のデジタル表現を生成するモーションキャプチャプロセッサ(12)とを備える。
(もっと読む)
1 - 20 / 526
[ Back to top ]