
Fターム[5L096DA01]の内容
Fターム[5L096DA01]に分類される特許
1 - 20 / 214
画像調整方法、画像調整装置及び画像調整プログラム
【課題】プレゼンテーション時の表示画像の視認性を向上させるのに有利な画像調整方法を提供する。
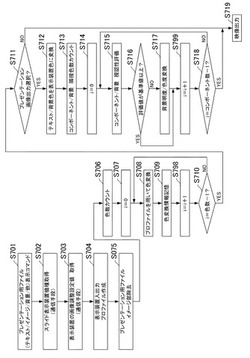
【解決手段】画像調整方法は、情報処理装置から画像データと、表示装置が表示する画像用の表示設定とを取得する取得工程(S702,S703)と、該表示設定を用いてプロファイルを作成し、作成したプロファイルを用いて表示装置から出力する画像の画像データに変換する変換工程(S704,S712)と、該画像データに含まれる第1コンポーネントと第2コンポーネントとの間の明度及び色度の差に関する視認性の評価値を演算する演算工程(S715)と、取得した視認性の評価値と、予め設定された基準値とを比較する比較工程(S716)と、比較工程で得られた比較結果が基準値を下回る場合に視認性が低いと判断し、明度または前記色度を変更することにより視認性を高める変更工程(S717)とを含む。
(もっと読む)
領域成長法によるラベリングの高速化

【課題】領域成長法を用いたラベリング処理を高速化する。
【解決手段】入力画像メモリと、近傍画素から処理対象画素と同一のラベルが付与される条件を満たす画素を探索する同一ラベル画素探索部と、前記同一ラベル画素探索部から出力される連結対象画素の位置情報を記録する連結画素情報保持部と、処理対象画像の全画素について「ラベル付与済み画素フラグ」を保持するラベリング済みフラグ更新部と、「ラベル付与済み画素フラグ」からプライオリティエンコーダにより次にラベルを付与する画素候補の位置情報を1つ選択して出力するラベル付与画素候補選択部と、前記連結画素情報保持部で保持される連結画素の情報と前記ラベル付与画素候補選択部の出力情報から次にラベルを付与する処理対象の画素と次のラベル番号とを決定するラベル付与制御部と、画素位置とラベル番号を基に各々の画素のラベル番号を書き込む出力ラベルメモリとを有する。
(もっと読む)
車線境界線認識装置
【課題】車線境界線の検出精度の改善。
【解決手段】車両の進行方向の路面の画像を所定時間の経過毎に取得し(ステップ210)、その画像に基いて輝度の変化点をエッジ点として抽出する(ステップ220)。更に、抽出されたエッジ点を通る白線候補線を抽出し(ステップ230)、その抽出された白線候補線の中から所定の条件を満足する白線候補線を車線境界線として選択する(ステップ250)。この車線境界線認識装置は、前記抽出されたエッジ点のうちの前記白線候補線が通過するエッジ点の個数をシグナル量Sと見做すとともに、前記抽出されたエッジ点のうちの前記白線候補線が通過しないエッジ点の個数をノイズ量Nと見做し、前記ノイズ量に対する前記シグナル量の割合に応じた値(S/N比)に基づいて算出される画像評価値(ステップ240を参照。)が閾値よりも小さい場合には前記画像に基く前記車線境界線の選択結果を破棄する(ステップ260)。
(もっと読む)
画像処理装置、直線検出方法及びコンピュータプログラム
【課題】読み取った画像から原稿の境界を精度よく検出することが可能な画像処理装置、直線検出方法、コンピュータプログラムを提供する。
【解決手段】情報処理装置20は、入力画像からエッジ画素を抽出するエッジ画素抽出部210と、抽出したエッジ画素からハフ変換を用いて直線候補を抽出する直線候補検出部221と、直線候補から所定距離内にあるエッジ画素に対して最小二乗法を用いて直線を検出する直線検出部222と、を有する。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】高速かつ自動的に画像から物体を切り出すことができる画像処理装置、方法及びプログラムを提供する。
【解決手段】画像処理装置は、画像について画素単位にクラスタリングを行うことにより複数のクラスタを生成し、生成されたクラスタの中から、クラスタに属する画素の位置に基づいて、前景の判定基準となる基準クラスタと、背景の判定基準となる基準クラスタとを選択し、生成されたクラスタを、基準クラスタとの類似度に基づいて前景又は背景に分類し、各クラスタの画素を、クラスタの分類結果に基づいて画素単位で前景又は背景に分類する。
(もっと読む)
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム
【課題】 直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】 直線検出装置30は、撮像手段20で撮像された撮影画像22内のエッジ点23について、撮影画像に基づく球面画像40内の各エッジ点の対応点である対応エッジ点の球面勾配ベクトルを算出する勾配算出部34と、球面画像における直線投影面60の法線ベクトルnを表す極角θ及び方位角φで構成されるハフ空間70に、各対応エッジ点を含む直線投影面の法線ベクトルを投票する投票部35と、所定の閾値以上の投票数を有する法線ベクトルで規定される直線投影面を決定することで、撮影画像内の直線を特定する直線特定部36とを備える。投票部は、各対応委エッジ点の位置ベクトルと直交する法線ベクトルであって、法線ベクトルと対応エッジ点における球面勾配ベクトルとの内積が0より大きい法線ベクトルを投票する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】入力画像の画像劣化を客観的な指標で検出して、検出結果に基づいて復元画像または画像分類を実行する。
【解決手段】入力画像の特徴量の平面分布を算出する特徴量算出部と、特徴量の平面分布に基づいて入力画像の画像劣化方向を得る特徴量解析部と、を備える画像処理装置を提供する。特徴量算出部は、入力画像を周波数変換して、特徴量の平面分布を算出してよい。また、特徴量算出部は、入力画像の縦方向および横方向の画素値の差分をそれぞれ算出して、特徴量の平面分布を得てもよい。
(もっと読む)
画像処理方法およびシステム
【課題】2D被写体の検出と分離、カメラ姿勢推定、3D形状位置合わせおよび3D画像認識を含む画像処理における被写体の姿勢を推定する方法を提供する。
【解決手段】画像データを分析するための装置はプロセッサを含む。該プロセッサは、被写体の姿勢の複数の予測を得るために前記画像データを分析するよう構成され、前記予測は前記被写体の予測姿勢のインジケーションを含んでおり、前記予測姿勢は共通の座標系の位置、方向、スケールに関して表現され、2つの被写体姿勢間の距離を計算することで前記予測姿勢を比較することにより前記予測をグループ化するように構成され、前記距離は距離関数を用いて計算される。
(もっと読む)
画像処理装置および画像処理方法
【課題】画像と文字とが混在するコンテンツの画像データに対する画像処理を良好に行って画質向上を図る。
【解決手段】入力画像データに基づいて、画面が複数個のブロックに分割されて得られる各ブロックの帯域情報を得る。各ブロックの帯域情報に基づいて画面を複数種類の領域、例えば、画像領域、文字領域、画像と文字の混在領域に分離する。分離された画面領域毎に処理強度を求める。入力画像データに対して、分離された画面領域毎に、求められた処理強度で所定の画像処理、例えばシャープネス処理などを行う。画像領域と文字領域とで同一の処理強度で画像処理が行われることによる画質の低下を回避できる。
(もっと読む)
動き画像領域判定装置またはその方法
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置
【課題】動き補償誤差を適切に減少させ、回路規模や計算量を大きく増加させることなく揺れを少なくしつつノイズを除去した動画像を得る。
【解決手段】基準画像と少なくとも一枚以上の参照画像とを加重加算する画像処理装置は、前記基準画像中の対象画素のコントラスト値を算出するコントラスト算出部(102)と、前記基準画像と前記参照画像との間の動きベクトルを算出する動きベクトル算出部(120)であって、前記コントラスト値を使用して前記動きベクトルの算出方法を変更する動きベクトル算出部と、前記動きベクトル算出部により算出された動きベクトルに基づいて、前記参照画像を前記基準画像に対して動き補償する動き補償部(106)と、前記基準画像と前記動き補償された参照画像とを前記対象画素ごとに加重加算する加重加算部(108)と、を備える。
(もっと読む)
エッジ点抽出装置、車線検出装置、およびプログラム
【課題】 低い処理負荷で車線を良好に検出できるエッジ点抽出装置、車線検出装置およびプログラムを提供する。
【解決手段】 画像処理ECU32は、カメラ30から取得した路面画像から画素グループを選択する(S2)。次に、画素グループの各画素の色成分ごとに平均輝度値を算出する(S3)。平均輝度値が第1閾値以上の色成分があれば、その中で最大のものを除いて残りの色成分に基づき輝度値変換し(S4,S5)、平均輝度値が第2閾値以下の色成分があれば、その中で最小のものを除いて残りの色成分に基づき輝度値変換し(S6,S7),または全ての色成分を用いて輝度値変換する(S8)。S5,S7,S8で変換した輝度値パラメータからエッジ点を抽出し(S9)、エッジ点に基づきエッジ線の抽出を行い(S11)、エッジ線から車線位置を算出する(S12)。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】連続階調領域と平坦領域が複合した領域に対しても、連続階調領域、平坦領域のいずれかであると判定してしまうことを防止するようにした画像処理装置を提供する。
【解決手段】画像処理装置の受付手段は画像を受け付け、分離手段は画像内の第1の領域を分離し、抽出手段は、前記分離手段によって分離された第1の領域内の予め定められた関係を有する色の第2の領域を抽出し、取得手段は、前記抽出手段によって抽出された第2の領域の形状に関する特徴を取得し、第1の判定手段は、前記取得手段によって取得された特徴に基づいて、前記第2の領域は平坦であるか否かを判定し、第2の判定手段は、前記分離手段によって分離された第1の領域における前記第1の判定手段によって平坦であると判定された第2の領域の割合に基づいて、該第1の領域の属性として、連続階調領域、平坦領域、連続階調領域と平坦領域が複合した領域のいずれかであることを判定する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法及びプログラム
【課題】人体の部位を撮像した画像の不要部分を消去した、より美しい画像を容易に取得することのできる画像処理装置等を提供する。
【解決手段】画像取得部141で取得された人物画像に対し、手領域検出部111が、画像の中から人の手が表示された領域を検出する。検出した手領域の、画像の全領域に対する割合が、予め定めた閾値以上であった場合に補正処理を行う。器官範囲特定部112が、手領域の中から肌が占める肌範囲と爪が占める爪範囲を特定し、画像補正部113が、特定された肌範囲及び爪範囲の画像に対して、各器官に対してユーザ等が予め設定した処理設定情報に基づいて、スムージング処理、色調補正、コントラスト補正等を行う。
(もっと読む)
文書画像データベースの登録方法および検索方法
【課題】文書画像データベースの大規模化に伴って顕在化するLocally Likely Arrangement Hashing (LLAH) のメモリ効率の問題、および、特徴量の識別性の問題を解決する改善手法を提供する。LLAH は高いロバスト性を実現するために、必要メモリ量が多く、また、大規模化に対処するには、特徴量の識別性・安定性が十分でないという側面がある。
【解決手段】以下の3 点の改良を施す。第1は、ハッシュに保存する特徴点をサンプリングすることによる必要メモリ量の削減である。第2は、特徴量の次元数を増加させることによる識別性向上である。第3は、特徴量のうち冗長性のある次元を削除することによる安定性向上である。
(もっと読む)
車両用白線認識装置
【課題】遠方で左右の白線候補点が入り交じった状態においても各候補点を左右に正しく分離することができ、遠方まで白線を精度よく認識することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、左右の白線検出領域A毎に、互いに隣接する白線候補点Pdの連続性を順次判定し、予め設定された連続性を有して所定数以上連続する白線候補点の点群を第1のグループとしてグループ化し、グループ化された白線候補点のみを用いて仮白線近似線Ltを演算する。そして、左右の仮白線近似線Ltを基準とする候補点選定領域Asをそれぞれ設定し、左右の白線検出領域Aで検出した全ての白線候補点Pdの中から各候補点選定呂域As内に存在する白線候補点Pdを最終的な白線候補点Pとしてそれぞれ選定する。
(もっと読む)
画像処理プログラム及び画像処理装置
【課題】対象画像内の対象物の数や形状が不定であっても、対象画像の中から指定された分類情報に係る対象物を含む画像領域を抽出する。
【解決手段】画像処理装置10は、分類情報が定められた複数の画像領域の画像特徴情報に基づいて、分類情報ごとの画像特徴情報の確率分布を算出し、対象画像を取得し、指定された分類情報に係る対象画像に含まれる画素ごとの評価値を、当該画素を含む画像領域の画像特徴情報と、指定された分類情報について算出された画像特徴情報の確率分布とに基づいて算出し、対象画像に含まれる画素ごとに算出された評価値に基づいて、対象画像の中から指定された分類情報に係る画像領域を抽出する。
(もっと読む)
画像出力装置、画像出力方法及びプログラム
【課題】鑑賞者までの距離を考慮した効果的な画像処理が施された画像を出力する。
【解決手段】撮像装置100であって、所定の表示部9から鑑賞者までの距離を特定する距離特定部5と、特定された距離に基づいて、複数の画像処理の中で所定の処理内容の画像処理を指定し、指定された所定の処理内容の画像処理を処理対象である画像に対して施す処理手段(アート変換処理部7c)と、画像処理が施された画像を所定の表示部に出力する出力制御部8とを備えている。
(もっと読む)
画像処理プログラム、記憶媒体、画像処理装置及び電子カメラ
【課題】撮像した画像に写り込んだ異物の影を除去する画像処理を行う場合の条件を適切に設定させることができる画像処理プログラム、記憶媒体、画像処理装置及び電子カメラを提供する。
【解決手段】画像処理を実行可能な画像処理装置が備える制御部により実行される画像処理プログラムであって、制御部に、オリジナル画像に写り込んだゴミNSを検出する際の検出レベルを設定する設定ステップと、検出レベルに応じてゴミNSを検出する検出ステップと、検出ステップで検出されたゴミNSの位置がオリジナル画像上に示された検出結果画像79をモニタに表示させる表示ステップと、オリジナル画像に対してゴミNSを除去するための画像処理を施す画像処理ステップと、を実行させる。
(もっと読む)
オブジェクト判別装置、方法、及びプログラム
【課題】オブジェクト判別装置において、重複する差分計算を回避する。
【解決手段】判別器13は、それぞれが、入力画像における少なくとも1組の2点間の差分を求め、求めた差分に基づいて検出対象物の存在に関するスコアを求める複数の弱判別器を含む。判別器13では、複数の弱判別器がカスケード接続されている。差分画像生成手段15は、弱判別器で差分を求めるべき画像の2点間の位置関係に応じたずれ量を設定し、入力画像と入力画像を設定したずれ量だけずらした画像との差分画像を生成する。複数の弱判別器のうちの少なくとも一部は、差分画像を参照して差分を取得し、スコアを求める。
(もっと読む)
1 - 20 / 214
[ Back to top ]