
Fターム[5L096EA06]の内容
Fターム[5L096EA06]に分類される特許
1 - 20 / 122
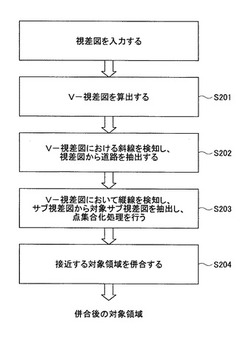
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
物体形状推定装置

【課題】多様な形状をとり得る物体の輪郭形状を少ない処理負荷で推定でき、背景や対象物細部の影響による輪郭形状の誤推定が減じられた物体形状推定装置を実現する。
【解決手段】画像中の所定物体の形状を推定する物体形状推定装置3であって、推定用記憶部30は、様々な形状の所定物体をかたどった物体領域と背景領域とに異なる画素値が設定された複数の形状画像と、複数の形状画像を非線形次元圧縮処理して得られた低次元の形状特徴空間における形状画像それぞれの座標値とを格納した形状画像データベース301と、所定物体が撮像された物体画像を形状特徴空間に写像する回帰モデル300とを予め記憶し、入力画像写像部321は入力画像を回帰モデル300により写像して写像値を算出し、形状推定部322は形状画像の中から座標値が写像値と類似する形状画像を検出し、検出した形状画像の物体領域から推定対象の形状を求める。
(もっと読む)
文字の読みやすさ評価方法
【課題】文字の読みやすさを定量化して評価することができる評価方法を提供する。
【解決手段】文字の読みやすさ評価方法は、文字図形を含む2値画像の文字線に対応する第1画素値を有する所定数以上のピクセルが連結している第1領域の数と、第1画素値を有するピクセルで囲まれた第2画素値を有する1つ以上のピクセルを含む第2領域の数とを検出するステップと、2値画像を平滑化処理して濃淡画像に変換するステップと、濃淡画像の階調に基づく2値化閾値を所定値ずつ変化させて、各2値化閾値で2値化された際の2値化された濃淡画像に含まれる第1領域の数と、第2領域の数とを、2値化閾値毎に検出するステップと、2値化された濃淡画像で検出される第1領域の数、第2領域の数が、2値画像で検出される第1領域の数、第2領域の数と同じ値で連続する2値化閾値の範囲を識別して範囲の下限値又は/及び上限値を算出するステップと、を含む。
(もっと読む)
画像処理方法、画像処理装置および画像処理プログラム
【課題】高速な顔検出を実現できる画像処理装置を提供する。
【解決手段】取得した画像から平滑化画像を生成するステップと、処理対象画像を含む処理対象画像以前の複数フレームの画像をもとに、各画素の平均値を算出し、算出した各画素の平均値とそれぞれのフレームの該当画素値から分散値を算出するステップと、処理対象画像の平滑化画像の輝度値に対して更なる平滑化処理を行い、正規化用画像を生成し、生成した分散値画像の各画素値に対して、生成した正規化用画像の各画素の値を用いて分散値画像の正規化を行い正規化分散値画像を生成するステップと、正規化した正規化分散値画像に対して膨張処理を実施して補正分散値画像を生成するステップと、補正分散値画像の各画素値に対して任意の閾値処理を行い二値画像を生成して人物領域を検出するステップと、分散値が一定値より大きいと判定された画素に対して顔検出処理を実施するステップとを有する。
(もっと読む)
入力画像における歪を検出する方法、入力画像における歪を検出する装置およびコンピューター読み取り可能な媒体
【課題】書物などのスキャン画像は背に近い所に歪みを有する。歪みを検出し、補正する方法を提供する。
【解決手段】特徴画像を用いてスキャンされた本の画像を分割化しページ領域に対応するピクセルをマップしページオブジェクトを作成してページの縁を検出する。ページオブジェクトの2つの間にある無地の背景領域を見つけ、ページ縁を分析してその形状を検出し、形状を分析して本の背の終端点を検出することにより本の背領域が検出される。ページ縁を用いて特徴画像を調べ、ピクセル値の上から下および下から上の下降勾配を検出し元のスキャンされた画像における影歪みの角を判定する。締め付けおよび湾曲歪みも検出される。ベジェ曲線を用いてページ上で検出された3つの歪みの各々をモデル化する。検出された歪みはまず台形の補正領域を定義することにより補正される。強度、締め付け、および湾曲補正が次に台形の補正領域内の線に沿って適用される。
(もっと読む)
画像処理装置と画像処理方法およびプログラム
【課題】簡単な構成で高速に特徴点を空間的に均一に間引くことができるようにする。
【解決手段】特徴点検出部211は、画像から特徴点を検出する。信頼度算出部212は、検出した特徴点の信頼度を算出する。間引き処理部22は、画像を複数領域に分割して、分割領域毎に特徴点が予め設定した特徴点制限数以内となるように、検出した特徴点の間引きを信頼度に基づいて行う。例えば特徴点が特徴点制限数以内となるように信頼度の低い順から間引きする。特徴点の数は、分割領域毎に特徴点制限数以内の数となるので、特徴点を空間的に均一に間引くことができる。
(もっと読む)
シーンにおけるオブジェクトを分類する方法
【課題】オブジェクト分類は、3D距離データ用の正確な分類方法が必要であり、オブジェクトを分類する方法を提供する。
【解決手段】移動するオブジェクトが、1組の1つ又は複数の1次元レーザーラインスキャナーを備えたスキャナーによって取得された距離データの最大マージン分類及び識別確率的逐次モデリングに基づいて分類される。2次元画像の形態での距離データは、前処理され、その後分類される。分類器は、外観分類器と、種々の推論技法を用いる系列分類器と、オブジェクトの構造の状態機械実施とから構成される。
(もっと読む)
画像検出装置
【課題】円柱曲面上の対象画像を効率的に検出する画像検出装置を提供する。
【解決手段】所定の特徴領域を含む所定の平面状対象物が変形して所定の円柱状立体物の曲面上に巻き付くことにより、曲面上特徴領域を含む曲面上対象物として存在している、該曲面上対象物の情報を入力画像より検出する画像検出装置1を、入力画像より直線を検出し、該直線の2本同士で挟まれる領域として円柱状立体物を含む円柱領域候補を検出する円柱領域検出部10と、変形する前の特徴領域の外接矩形の所定の縦の長さ及び横の長さと、円柱状立体物の所定の半径と、特徴領域の所定の色情報とに基づいて、円柱領域候補の内部より曲面上特徴領域を検出する特徴領域検出部20と、抽出された曲面上特徴領域に基づいて曲面上対象物の位置情報を検出する対象物検出部30とを備えて提供する。
(もっと読む)
物体認識処理装置及び物体認識処理方法
【課題】バーコードラベルや無線タグが付されていない商品を画像認識処理により短時間で精度良く認識できるようにする。
【解決手段】撮像部10より撮像された認識対象物のカラー画像信号について、認識処理部20において、第1の認識処理部22により、上記カラー画像信号からHSV色空間に変換して、H(色相)情報とS(彩度)情報のカラーヒストグラムを作成し、上記認識対象物の第1の特徴情報として、予め作成されている基準のカラーヒストグラムと比較することにより上記認識対象物を認識し、また、第2の認識処理部23により、上記カラー画像信号に含まれる認識対象物の輝度情報からSIFT特徴量を抽出し、K−means法によるクラスタリングに対応したクラスを横軸としたヒストグラムを作成し、上記認識対象物の第2の特徴情報として、予め作成されている基準のヒストグラムと比較することにより上記認識対象物を認識する。
(もっと読む)
爪領域検出装置およびネイルアートシミュレータ
【課題】照明による影やハレーションに対する耐性が高く、指領域と爪領域を正確に分離できる爪領域検出方法および装置ならびにネイルアートシミュレータを提供する。
【解決手段】指領域分離部201は、手指の画像を指領域とその背景領域とに分離する。指軸検出部202は、指領域の対称軸を指軸として検出する。軸対称平滑化部203は、前記指軸を中心に軸対称の位置関係にある画素ペアの画素値を平滑化する。爪領域抽出部204は、軸対称で画素値を平滑化された指領域を、その輝度を代表できる画素値に基づいて爪領域と肌領域とに分離して爪領域を抽出する。ネイル画像重畳部205は、抽出された爪領域にネイルアート画像を重畳表示することでネイルアートをシミュレートする。
(もっと読む)
画像処理装置、撮像装置、および画像処理プログラム
【課題】主要被写体画像と背景画像とを抽出し、好興趣に富む新たな画像を生成する。
【解決手段】処理の対象となる対象画像を複数のブロックに分割する領域分割部、外周部に存在するブロックの画像に基づいてテンプレートを設定する設定部、前記複数のブロックの各々について代表値を算出する算出部、マッチング対象のブロックの代表値と前記テンプレートにおける代表値とを比較するマッチング部、マッチングの結果に基づいて対象画像における被写体の分布を示すマップを作成する作成部、対象画像ごとのマップに基づいて複数の対象画像のそれぞれから主要被写体画像を抽出する第1抽出部、マップに基づいて複数の対象画像のうち任意の1枚の対象画像から背景画像を抽出する第2抽出部、第1抽出部により抽出した少なくとも1枚の主要被写体画像と第2抽出部により抽出した背景画像との少なくとも一方に基づく新たな画像を生成する生成部とを備える。
(もっと読む)
オブジェクト判別装置、方法、及びプログラム
【課題】オブジェクト判別装置において、重複する差分計算を回避する。
【解決手段】判別器13は、それぞれが、入力画像における少なくとも1組の2点間の差分を求め、求めた差分に基づいて検出対象物の存在に関するスコアを求める複数の弱判別器を含む。判別器13では、複数の弱判別器がカスケード接続されている。差分画像生成手段15は、弱判別器で差分を求めるべき画像の2点間の位置関係に応じたずれ量を設定し、入力画像と入力画像を設定したずれ量だけずらした画像との差分画像を生成する。複数の弱判別器のうちの少なくとも一部は、差分画像を参照して差分を取得し、スコアを求める。
(もっと読む)
侵入監視装置及び侵入監視方法
【課題】カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害検知が可能な侵入監視装置を提供する。
【解決手段】動物体検知部22の検知結果を基に小領域ごとに単位時間当たりの検知数を測定して人通りの多少を推定する動物体存在領域推定部23と、基準画像生成部21で生成された基準画像を基に明るさ変動に頑健な特徴点が多く存在する領域を選定する特徴量有効領域選定部24とを備え、撮像部1への妨害検知判定領域を動的に選定するようにした。これにより、カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害を検知することができる。
(もっと読む)
オブジェクト判別装置、方法、及びプログラム
【課題】オブジェクト判別装置において、弱判別器における処理を効率的に実行し、処理を高速化する。
【解決手段】判別器13では、それぞれが、差分計算に関する複数の基本特徴タイプの何れかで差分計算を行い、入力画像から検出対象物の存在に関するスコアを求める複数の弱判別器を含む。複数の弱判別器は、カスケード接続されている。判別器13では、基本特徴タイプが同じ弱判別器が連続して並べられている。
(もっと読む)
ジェスチャー認識装置、方法、プログラム、および該プログラムを格納したコンピュータ可読媒体
【課題】自由空間を移動する物体の軌跡によって表わされるジェスチャーを認識するためのジェスチャー認識装置を提供する。
【解決手段】本発明のジェスチャー認識装置(1000)は、前記物体を撮像した動画像を構成するフレーム画像における前記物体の位置する画素座標を求め、撮像時刻に基づく時系列の画素座標データを生成する物体追跡手段(20)と、前記求めた画素座標における前記物体の移動方向を求め、時系列の移動方向データを生成する移動方向特定部(40)と、予め用意した移動方向の組み合わせからなる複数のジェスチャーパターンの中から前記移動方向データと一致するジェスチャーパターンを検索し、一致したジェスチャーパターンを前記物体のジェスチャーと判断するパターンマッチング手段(60)とを備える。また、前記移動方向特定部は、前記物体の移動方向を9種類(静止状態を含む)の何れかに近似して求める。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
動画オブジェクト検出装置、方法、及びプログラム
【課題】オブジェクトの誤検出と検出漏れとの双方を抑制する。
【解決手段】オブジェクト検出手段12は、動画像のフレーム画像からオブジェクトを検出し、検出したオブジェクトの位置をオブジェクトリスト記憶部14に記憶する。オブジェクト追跡処理手段13は、オブジェクトリスト記憶部14に記憶されたオブジェクトの位置を、そのオブジェクトが検出された時刻以後、複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。また、オブジェクト追跡処理手段13は、オブジェクト検出手段12でオブジェクトが新たに検出されたとき、その新たに検出されたオブジェクトの位置を、オブジェクトが検出されたフレーム画像の時刻よりも前の時刻に遡って複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。
(もっと読む)
物体形状認識装置及び特徴点検出方法
【課題】境界上での特徴点検出処理を適正に行なうことにより、形状データから物体の形状を確実に認識できる物体形状認識装置が求められる。
【解決手段】本実施形態によれば、物体形状認識装置は、入力ユニットと、仮想面配置処理ユニットと、特徴点検出処理ユニットとを備えた構成である。入力ユニットは、物体の形状を表す形状データを入力する。仮想面配置処理ユニットは、前記形状データのデータ欠損部に仮想面を設定する。特徴点検出処理ユニットは、前記形状データ及び前記仮想面を使用して、前記物体の形状を構成するための特徴点を検出する。
(もっと読む)
ターゲット検出方法及び装置
【課題】
画像又は映像内のターゲットを検出する方法及び装置を提供する。
【解決手段】
ターゲット検出方法において、入力画像内の第1方向のエッジが検出されて、第1方向の複数のエッジを有するエッジ画像が取得される。第1方向の前記複数のエッジに従って1つ以上の候補ターゲットが生成される。入力画像内の第1方向の前記複数のエッジのうちの如何なる2つについても、その間の領域が候補ターゲットのうちの1つに対応する。
(もっと読む)
特徴量算出装置、画像接続装置、画像検索装置、特徴量算出方法、および特徴量算出プログラム
【課題】画像の回転に強い特徴量を、コントラストによらずに算出することができる特徴量算出装置、画像接続装置、画像検索装置、特徴量算出方法、および特徴量算出プログラムを提供する。
【解決手段】特徴量算出装置として、コーナー量を算出するコーナー量算出部と、特徴点を検出する特徴点検出部と、支配的配向を算出する支配的配向算出部と、特徴点を中心とするp個の円の円周上の画素データを検出する同心円検出部と、各画素データにおける画素値の勾配の角度と支配的勾配との差分値に円の半径の平方根を乗じた重み付き差分値をそれぞれ算出する重み付き差分値算出部と、重み付き差分値についてのq個の階級を有する度数分布を作成する度数分布作成部と、各円についての各度数を成分とするq次元のベクトルから、p×q次元の記述子ベクトルを算出する記述子ベクトル算出部とを設ける。
(もっと読む)
1 - 20 / 122
[ Back to top ]