
Fターム[5L096EA15]の内容
イメージ分析 (61,341) | 前処理 (3,379) | 正規化 (765) | 位置の正規化(位置合わせ) (432) | 平行移動するもの (60)
Fターム[5L096EA15]に分類される特許
1 - 20 / 60
姿勢検出装置および姿勢検出方法
画像照合装置または画像照合方法
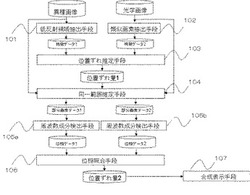
【課題】 二つの画像がSAR画像と光学画像とで異種である場合に、特徴点やエッジが明確に検出できない場合であっても画像の照合をおこなうことを目的とする。
【解決手段】 本発明によれば、異種画像と光学画像について各々フーリエ変換を行う周波数成分検出手段105a、105bと、異種画像と光学画像の各々の区間の画素列を周波数変換後の周波数成分を照合することによって異種画像と光学画像との位置あわせをおこなう位相照合手段106を備えた。
(もっと読む)
画像処理装置、位置合わせ方法及びプログラム

【課題】変形する対象の画像を抽出し、抽出結果を基に対象の位置を補正することを可能とすることを目的とする。
【解決手段】画像を取得する画像取得手段と、画像取得手段で取得された画像から特徴量を抽出する特徴抽出手段と、対象のモデルと特徴抽出手段で抽出された画像の特徴量とを基に対象の尤度を算出する尤度算出手段と、尤度算出手段で算出された尤度を基に画像内にある対象の検出領域を検出する検出手段と、モデルと検出手段で検出された検出領域とに基づいて、対象が変動している部分と変動していない部分とを識別する識別手段と、識別手段で識別された対象が変動していない部分を基にモデルと検出領域との位置合わせを行う位置合わせ手段と、を有することによって課題を解決する。
(もっと読む)
物体認識装置、物体認識方法、学習装置、学習方法、プログラム、および情報処理システム
【課題】対象物体の姿勢に対応した信頼度の高い領域組からの投票を重視することで、対象物体を精度よく認識する。
【解決手段】対象物体を検出する検出器の学習方法は、対象物体の既知の三次元モデルから複数の特定領域を選択する選択工程と、選択工程で選択された特定領域を検出する検出器の学習を行う学習工程と、学習工程で学習された検出器により複数の特定領域のうち所定の領域の位置および姿勢の認識処理を行う評価工程と、評価工程における認識処理の結果の認識精度に従って、検出器の出力に対する投票重みを設定する正規化工程とを有する。
(もっと読む)
オブジェクト判別装置、方法、及びプログラム
【課題】オブジェクト判別装置において、重複する差分計算を回避する。
【解決手段】判別器13は、それぞれが、入力画像における少なくとも1組の2点間の差分を求め、求めた差分に基づいて検出対象物の存在に関するスコアを求める複数の弱判別器を含む。判別器13では、複数の弱判別器がカスケード接続されている。差分画像生成手段15は、弱判別器で差分を求めるべき画像の2点間の位置関係に応じたずれ量を設定し、入力画像と入力画像を設定したずれ量だけずらした画像との差分画像を生成する。複数の弱判別器のうちの少なくとも一部は、差分画像を参照して差分を取得し、スコアを求める。
(もっと読む)
パターン照合システム、パターン照合方法およびパターン照合用プログラム
【課題】パターンを高い精度で照合すること。
【解決手段】特徴抽出部は、入力パターンの特徴を抽出する。照合部は、入力パターンの特徴の中で経時変化しない第一の特徴を、テンプレートパターンと照合する第一の照合と、第一の照合とは異なる照合であって、入力パターンの特徴の中で経時変化する第二の特徴を、テンプレートパターンと照合する第二の照合とを行う。経時変化特徴補正手段は、その第二の特徴から、その第一の特徴とその第二の特徴とに共通に表われる影響を取り除くための補正データを、その第一の照合による照合結果に基づいて生成し、その共通に表われる影響として、入力パターンの回転による影響、入力パターンの平行移動による影響、入力パターンの変形による影響、輝度の相違による影響、又は、濃度の相違による影響のうち、少なくとも一つの影響を取り除くための補正データを生成する。
(もっと読む)
画像処理装置、及びコンピュータプログラム
【課題】本発明は、設計データと輪郭線、或いは輪郭線間のマッチングを行うに当たり、両者の対応点を正確に特定する画像処理装置、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、第1の線分によって形成される第1のパターンと、第2の線分によって形成される第2のパターン間の位置合わせを行うときに、第1の線分と第2の線分上にそれぞれ第1の対応点と、第2の対応点を設定し、第1の対応点と第2の対応点間の距離に基づいて、第1のパターンと第2のパターンの位置合わせを行うためのアライメント量を算出すると共に、第1の線分と第2の線分の形状差に応じて、第1の対応点、及び/又は第2の対応点の位置を変化させる。
(もっと読む)
画質評価方法、画質評価装置、及びプログラム
【課題】超解像度画像に対して主観評価により近い客観的画質評価を行う。
【解決手段】高解像度画像入力部101は、基準画像となる高解像度画像IMG10を入力する。低解像度画像生成部102は、低解像度画像を生成するためにランダムに生成したパラメータに従って、高解像度画像IMG10からn個の低解像度画像IMG20を生成する。超解像度画像生成部103は、n個の低解像度画像IMG20から1枚の超解像度画像IMG30を生成する。超解像度画像画質評価部104は、超解像度画像を生成する際に発生する画素の位置のずれを考慮し、画像の輝度値を評価する評価基準と、画像特徴点からの画質を評価する評価基準と、画像領域分割からの画質を評価する評価基準とのうち、いずれか1つ、あるいはそれらを組み合わせて超解像度画像画質を評価する。
(もっと読む)
印影イメージの中点算出装置、方法、及びプログラム
【課題】印鑑照合処理をコンピュータで実現するための技術に関し、照合/回転/半折り等の精度を向上させるために、印影イメージの正確な中心点を求める。
【解決手段】ラベリング処理部104は、印影イメージに対し、印を構成する各文字をラベリングして切出矩形領域を抽出する。ラベリング内中心点算出処理部106は、各切出矩形領域内の中心点を算出する。外周線算出処理部108は、切出矩形領域内の中心点を結ぶ外周線を算出し、各外周線の各辺の中点を算出する。線分算出処理部110は、各辺の中点毎に、切出矩形領域内の中心点の数が偶数の場合は、中点とその中点に対向する中点とを結ぶ線分を算出し、奇数の場合は、中点とその中点に対向する切出矩形領域内の中心点とを結ぶ線分を算出する。交点決定処理部112は、各辺の中点毎に抽出された線分同士が所定の誤差範囲内で交わる交点を、印影イメージの中心点として算出して決定する。
(もっと読む)
被写体領域抽出装置およびその制御方法、被写体追跡装置、並びにプログラム
【課題】画像中の任意の被写体が指定された場合に、指定された領域から目的とする被写体領域を判定し抽出する。
【解決手段】画像中から所定の被写体領域を抽出する被写体領域抽出装置であって、前記画像中から前記所定の被写体を含む領域を指定する指定手段と、前記指定手段により指定された領域から前記所定の被写体が持つ特徴量を抽出する抽出手段と、前記指定された領域に含まれる前記所定の被写体が持つ特徴量と一致する特徴画素の分布状況に基づいて当該指定された領域における前記所定の被写体の位置の偏りを検出する検出手段と、前記指定された領域における前記所定の被写体の位置の偏りが小さくなるように当該指定された領域の位置を補正する補正手段と、を備え、前記抽出手段は、前記指定された領域内の各画素の色相成分および明度成分の少なくともいずれかを用いて前記特徴量を抽出すると共に、被写体から得られる色情報に応じて前記色相成分と明度成分の重み付けを変えて前記特徴量を抽出する。
(もっと読む)
動画像被写体運動表示装置および動画像被写体運動表示用プログラム
【課題】映像中において回転等を含む人体や物体の動きを表現する矢印形状の付加情報を生成し,映像に合成して表示することにより,人体や物体の動きをわかりやすくする。
【解決手段】動物体領域抽出部20は,映像中で動く動物体(被写体)の領域を抽出する。動物体運動抽出部30は,領域の形状変化の有無および領域内の特徴点の軌跡により,動物体の重心の並進運動と,動物体の回転運動の有無および回転の軸を推定する。矢印形状決定部50は,運動の移動量または変化量に対応する形状/大きさを持つ矢印形状の付加情報を生成し,それをもとに,矢印形状合成部60は,被写体の像に重畳して,並進や回転の動きを示す矢印の表示データを生成する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】2つの画像の相似性の判断を、従来と比してより短時間でより少ないメモリ使用量で実現可能とする。
【解決手段】変動補正パラメータ推定部25は、処理対象の各画像から生成された投影波形の局所ピークとなる位置座標と当該位置の投影波高値との組により表される各画像の特徴量から、一方の画像のピーク位置それぞれを、他方の画像の各ピーク位置と重ね合わせるための拡縮率k及び移動量sで表されるs−k平面座標上の直線式を生成し、予め決められた範囲を複数のセルに分割し、セル毎に直線式の投票を行う。そして、同じピーク位置に基づく直線式が重複して通過するセルが存在する場合、そのセルを同じピーク位置に基づく直線式が重複して存在しなくなるまで再分割し、その後最大投票値となるセル内の直線式に基づき拡縮率k及び移動量sを変動補正パラメータとして推定する。
(もっと読む)
画像検索装置およびその方法
【課題】幾何的に対称な部分が存在する画像の検索に関して、類似する特徴点の組み合わせを適切にし、無為に対応点候補個数を増やすことなく検索することを可能にする。
【解決手段】画像検索装置は、クエリ画像より互いに対応する特徴点の対を取得し、取得された特徴点の対に基づいて対称性を有する部分画像を抽出し、部分画像をその対称軸で分割して得られる2つの部分領域のそれぞれを、当該部分画像における画像特徴の傾向に基づいて第1領域と第2領域に決定する。クエリ画像と比較先画像の類似性の判定においては、両画像の第1領域に決定されている部分領域から抽出された特徴点の対に基づいて座標変換処理のための座標変換係数が設定され、当該両画像の第1領域以外の領域を含む領域から抽出された特徴点の対に対して上記座標変換係数を用いた座標変換処理を適用して、座標変換処理後の特徴点の対の座標が比較される。
(もっと読む)
画像認識装置、撮像装置及び画像認識方法
【課題】画像に含まれる人物の表情や個人を高精度に識別できるようにする。
【解決手段】パラメータ設定部1300は、顔検出部1100による顔検出結果に基づいて、画素値の勾配方向及び勾配強度を示す勾配ヒストグラムを生成するためのパラメータを設定する。さらに、勾配ヒストグラム特徴ベクトル生成部1400は、検出された顔の領域から、勾配ヒストグラムを生成する対象となる領域(1セル)を設定し、その領域毎に勾配ヒストグラムを生成して特徴ベクトルを生成する。そして、表情識別部1500において、検出された顔の表情を、SVMを用いて識別する。
(もっと読む)
画像検索装置およびその方法
【課題】処理負荷を多くする事無くクエリからの特徴点の選択の反復回数を大きい数にすることを可能にする。
【解決手段】入力されたクエリ画像と登録されている比較先画像との類似を判定して、該クエリ画像に類似する画像を検索する画像検索装置は、クエリ画像から選択された特徴点と比較先画像の特徴点とをそれら特徴点の特徴量に基づいて対応付けることにより、2つの画像において対応する複数対の特徴点を抽出する。そして、複数対の特徴点から、少なくとも2対の特徴点を取得し、それらの各対に関して、2つの画像のうちの一方の画像の特徴点の座標が他方の画像の特徴点の座標と一致するように座標変換処理するための座標変換係数を決定する。そして、上記座標変換係数を用いた座標変換処理による座標の変換量があらかじめ指定された制約条件を満足する場合にのみ、2つの画像の類似判定のために、上記複数対の特徴点に関して上記座標変換係数を用いた座標変換処理を施し、一方の画像の変換後の特徴点の座標と他方の画像の対応する特徴点の座標とを比較する。
(もっと読む)
画像処理装置、それを備えたデジタルカメラ及び画像処理プログラム
【課題】 動画等の時系列的に前後する画像間の位置ずれ量の検出を高精度に行える画像処理装置、それを備えたデジタルカメラ及び画像処理プログラムを提供する。
【解決手段】 画像処理装置(16,20)は、時系列的に前後する画像1と画像2との間の変化量を検出する為、手段A(20)が、入力の位置ずれ量をパラメータにして画像1での画素群αに幾何変換を実施し、変換後の画像1における画素群αの画素と、該画素群αの画素と同一座標にある画像2中の画素との輝度差に基づきゲインを算出する。また手段B(20)が、入力のゲインを画像2に乗算し、画像1から画素群βを抽出し、画像1とゲイン乗算後の画像2との間における画素群βの位置の変化量を推定して位置ずれ量を算出する。そして検出手段(20)が、手段Aに手段B算出の位置ずれ量を入力し、手段Bに手段A算出のゲインを入力して、手段Aと手段Bとを少なくとも1回以上実行する。
(もっと読む)
画像処理プログラム、画像処理装置、および撮像装置
【課題】 複数のディジタル画像の位置合わせにおいて、局所解に陥る可能性を低減しつつ、高精度な位置合わせを実現すること。
【解決手段】 2つの画像の位置合わせをコンピュータで実現するための画像処理プログラムであって、2つの画像を取得する取得ステップと、複数のパラメータを用いて、位置合わせに関する評価値を、2つの画像に基づいて算出する算出ステップと、複数のパラメータのそれぞれの重みを設定する設定ステップと、設定ステップにおいて設定された異なるパラメータを用いて算出ステップにおいて算出された複数の評価値を比較して、2つの画像の相対的な位置を検出する検出ステップとを備える。
(もっと読む)
未知の顔の入力画像を既知の顔の基準画像と比較する方法
【課題】方法は、既知の顔の基準画像を使用して入力画像内の未知の顔を識別する。
【解決手段】各画像からHaar−like特徴ベクトルを抽出する。このベクトルを圧縮する。入力画像の圧縮特徴ベクトルと、基準画像のセットからの各圧縮特徴ベクトルとの間のL1ノルムを求めて、最も類似している基準画像を求める。最も類似している基準画像に関連付けられる顔のアイデンティティが、入力画像内の未知の顔のアイデンティティとして指定される。
(もっと読む)
画像処理装置および画像処理方法
【課題】動画像内で動きを有する対象物に対する加工処理は困難である。
【解決手段】画像処理装置70は、パーティクルフィルタを用いて動画像内の対象物の輪郭線を取得する追跡装置14、ユーザが画像処理装置70に対し、処理の開始、終了の指示、加工処理の内容の選択を行う入力部72、跡装置14から追跡結果である対象物の輪郭線を表す曲線のデータを取得し、爪や指など対象部位の位置を特定する部位特定部74、部位特定部74が特定した対象部位に対し、部位が爪であればネイルアートの画像を合成するなど所定の加工処理を施し、対象物の動きに応じて加工処理の態様を変化させる加工処理部76、加工処理の結果、得られる画像を表示したり動画データとして記憶する出力部78を含む。
(もっと読む)
画像処理装置および画像処理方法
【課題】視覚追跡において形状変化を伴う対象物の追跡処理は困難である。
【解決手段】まず撮像した動画像データをフレームごとに読み出し、追跡対象の有無により追跡開始の判定を行う(S20、S22)。追跡開始が判定されたら当該画像フレームのエッジ画像を生成する(S24)。一方、追跡対象の形状を表すBスプライン曲線の制御点列を、あらかじめ準備した複数の基準形状を表すBスプライン曲線の制御点列の線形和で表現する際に各制御点列にかかる係数のセットの空間にパーティクルを分布させる(S26)。さらに形状空間ベクトルの空間においてもパーティクルを分布させ(S28)、各パーティクルの尤度観測、確率密度分布を取得する(S30)。確率密度分布によって各パラメータに重み付け平均して得られる曲線を追跡結果として生成する(S32)。
(もっと読む)
1 - 20 / 60
[ Back to top ]