
Fターム[5L096EA27]の内容
Fターム[5L096EA27]に分類される特許
1 - 20 / 119
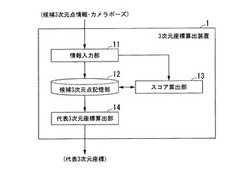
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
画像類似度判定装置、画像類似度判定方法及び画像類似度判定プログラム

【課題】局所的な特徴量を算出した複数の特徴点群の系列を用いて一括して画像間の幾何的な対応を求めて、より計算効率が良く、また、より精度良く画像同士を対応づけして類似度の判定を行う。
【解決手段】複数の画像の類似度を判定する画像類似度判定装置であって、複数の画像それぞれから特徴点群を検出する特徴点検出手段と、複数の画像のそれぞれから検出した特徴点群から、所定のサンプリングを行って、順序関係を持たせた特徴点の系列情報を複数の画像それぞれについて作成して出力する特徴点サンプリング手段と、複数の画像それぞれについて、順序関係を持たせた特徴点の系列情報を特徴ベクトル化して出力する特徴ベクトル生成手段と、複数の画像の特徴ベクトルそれぞれについて線形変換を施して出力する線形変換手段と、線形変換の結果を用いて複数の画像の類似度を判定する類似度判定手段とを備える。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
画像処理装置および方法、学習装置および方法、プログラム、並びに記録媒体
【課題】露光時間の異なる撮像素子を用いて撮像された画像の動きを、簡単に、かつ精度よく検出することができるようにする。
【解決手段】複数の露光時間を有する複数の画素を規則的に配置して構成された撮像素子を用いて画像を撮像する撮像部によって撮像された画像の中の注目画素の予測値を、前記注目画素と露光時間が異なる複数の他の画素の値、および、前記他の画素のそれぞれに対応する予測係数に基づいて算出する算出部と、前記算出された前記注目画素の予測値と前記注目画素の値に基づいて、前記注目画素の単位時間当たりの動き量を特定する動き量特定部とを備える。
(もっと読む)
ピーク座標推定装置及びピーク座標推定方法
【課題】ピーク座標推定の精度を高めることのできるピーク座標推定装置を得る。
【解決手段】暫定ピーク検出部1は、暫定ピーク判定領域で、中心座標の信号値が周辺の座標に位置する信号値に比較して突出した値であった場合、中心座標を暫定ピーク座標として検出する。対象範囲決定部2は、暫定ピーク座標と、暫定ピーク座標の周辺に位置すると共に、予め定めた閾値以上の値を有する信号値の座標の集合を対象範囲として生成する。重心座標算出部3は、対象範囲において、暫定ピーク座標の信号値を重みとして重心座標を求め、重心座標を推定されたピーク信号の座標値として算出する。
(もっと読む)
表情認識装置、方法、及びプログラム
【課題】表情カテゴリの変化が様々な速度で行われても、表情カテゴリを精度良く、かつ早期に認識することができるようにする。
【解決手段】表情学習部16によって、各表情カテゴリについて、無表情から当該表情カテゴリへ変化したときの参照用の時系列データに基づいて、当該表情カテゴリであるか否かを識別する早期識別器を学習する。入力部10によって、無表情からの変化を示す時系列データを取得する。第2動的時間伸縮部24によって、各表情カテゴリについて、取得された時系列データを、当該表情カテゴリへ変化するときの参照用の時系列データに対してデータの変化が一致するように時間方向に伸縮させた時間伸縮時系列データを各々生成する。早期認識部26によって、各表情カテゴリについて生成された時間伸縮時系列データと、各表情カテゴリに対する早期識別器とに基づいて、人物の顔の表情カテゴリを認識する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】頭部特徴である頭部上方のエッジをより高精度で検出できるようにする。
【解決手段】設定された頭部検出領域についてエッジ画素を検出する手段と、前記エッジ画素をハフ変換における楕円パラメータの空間の各楕円に累積する手段と、前記エッジ画素の数に基づいて候補楕円を選出する手段と、楕円性指標から構成された総合指標を用いて前記候補楕円から頭部楕円を選択する手段とを備えるようにして、頭部特徴である頭部上方のエッジをより高精度で検出できるようにする。
(もっと読む)
パターン位置検出方法
【課題】簡便な画像処理によって部品の位置検出時間を短縮する。
【解決手段】モデル画像取得工程と、取得したモデル画像を特定のパターンを含む複数の基準画像に分割する基準画像生成工程と、検出対象物の画像を取得する検出画像取得工程と、検出画像の上の複数の所定位置に各基準画像の各原点を合わせる原点あわせ工程と、各基準画像の各原点を検出画像の上の複数の所定位置からXY方向にずらしながら検出画像の中の各基準画像に対応する各領域にある各検出画像部分と各基準画像とを順次対比し、各相関値を順次取得する対比工程と、それぞれの対比位置における各相関値を統合XY面内で統合して統合相関値を生成する統合工程と、統合した統合相関値のピークの統合XY座標値を検出対象物の各所定位置からXY面内での各基準画像に含まれる各特定のパターンの位置のズレと認識する位置ズレ認識工程と、を含むことを特徴とする。
(もっと読む)
画像抽出方法
【課題】転がり軸受、ボールねじやリニアガイド等の直動装置、電動パワーステアリング装置等のステアリング装置等の機械部品や機械装置の精度、状態、特性を分析する際、各種の画像上のグラフデータを読み取り、画素に変換し、グラフ部分の画素を抽出し、グラフ座標と画素座標の対応関係を算出し、抽出した画素の位置情報をグラフ座標に変換してデータとして抽出し、周波数分析等の各種分析に使用する画像抽出方法を提供する。
【解決手段】本発明による画像抽出方法は、画素変換手段、画素抽出手段、グラフ座標と画素座標の対応関係算出手段、画素位置情報変換手段を含むことを特徴とする。
(もっと読む)
ジェスチャ入力装置
【課題】本発明は、撮像装置からの撮像画像に基づいてジェスチャが認識される場合において、ジェスチャの誤認識を低減することが可能なジェスチャ入力装置を提供することを目的とする。
【解決手段】ユーザの身体に装着される撮像部11と、撮像部11により撮像されるユーザの手指の撮像画像に基づいて、ユーザにより行われる手指のジェスチャを認識するジェスチャ認識部12と、ジェスチャ認識部12により認識されるジェスチャに対応する動作制御指示を出力する指示出力部14と、ユーザの手指の撮像画像に基づいて実空間におけるユーザの手指の位置を求め、実空間において予め設定されるジェスチャ認識領域内にユーザの手指が存在するときのみ、指示出力部14から動作制御指示が出力されることを許可する指示出力許可部13とを備えてジェスチャ入力装置10を構成する。
(もっと読む)
画像照合プログラム、画像照合方法、及び画像照合装置
【課題】画像検索に必要な処理時間を短縮できる画像照合プログラム、画像照合装置、画像照合方法、及び画像検索システムを提供することを目的とする。
【解決手段】入力画像を取得する入力画像取得部21と、入力画像を輝度値に応じた領域に分割する領域分割部23と、領域毎に領域内の一点を示す代表点座標を取得する代表点座標生成部25と、代表点座標における入力画像の輝度値を取得する第1輝度値テーブル作成部27と、蓄積画像を取得する蓄積画像取得部31と、代表点座標における蓄積画像の輝度値を取得する第2輝度値テーブル作成部35と、入力画像と蓄積画像の代表点座標における輝度値の差が所定範囲内か否かを、全ての前記代表点座標について判別することにより前記第1の画像と前記第2の画像とを照合する画像照合部13により画像照合装置を構成することにより、上記課題の解決を図る。
(もっと読む)
表面が変化する対象物を3次元デジタル化する方法
【課題】表面が変化する対象物を3次元デジタル化する方法を提供する。
【解決手段】対象物4の複数の部分的表面を示す複数のカメラ画像を撮影して統合して、対象物4の部分的表面の3次元座標を決定する。複数のカメラ画像は、それぞれの端部において互いに重なり合う。マッチング法により対象物4の部分的表面の3次元座標を照合して統合する。カメラ画像の各々をサブフレーム(1.1〜1.8,2.1〜2.9,3.1〜3.9)に分割する。複数のサブフレームは、それぞれの端部において互いに重なり合い、隣接するカメラ画像に含まれるサブフレームに重複する。サブフレーム(1.1〜3.9)に対して、カメラ画像からそのサブフレームに関連する3次元座標を割り当てる。マッチング法によりサブフレーム(1.1〜3.9)の3次元座標を照合して統合する。この方法を数回繰り返して実行する。
(もっと読む)
車両検出装置
【課題】カメラの設置自由度が高く、高い検出精度が得られる車両検出装置を提供することを目的とする。
【解決手段】実施形態によれば、線分抽出手段と、候補生成手段と、評価手段と、特定部位検出手段とを具備する。そして、線分抽出手段は、車両を撮影した画像から、車両の映像を構成する複数の線分成分を抽出する。候補生成手段は、複数の線分成分を用いて閉ループを生成する多角形近似を行い、車両の特定部位の領域の候補を複数生成する。評価手段は、複数の候補に対して、それぞれ複数の異なる評価を行う。そして特定部位検出手段は、評価手段の評価結果に基づいて、複数の候補のうち1つの候補を特定部位として検出する。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
電子機器、電子機器の方向提示方法、プログラムおよび電子機器の方向提示システム
【課題】 通話中に、例えば、目的の場所や人物、通話相手の方向を、触覚によってリアルタイムで提示することのできる電子機器、電子機器の方向提示方法、プログラムおよび電子機器の方向提示システムを提供する。
【解決手段】 位置情報取り込み手段、方位情報取り込み手段、および、ユーザの顔の少なくとも一部の画像情報を取り込む画像情報取り込み手段、ならびに、出力部が、制御部に接続されており、制御部が、目標位置特定手段と、目標方向特定手段と、目標方向と電子機器の基準方向との差分を検出する第1の差分検出手段と、相対姿勢特定手段と、ユーザの顔の向きを基準とした目標方向に座標を変換する座標変換手段と、座標変換後の目標方向と座標変換前の目標方向との差分を検出する第2の差分検出手段と、検出された差分情報に基づき、出力部を制御する出力部制御手段とを備え、出力部が、方向を提示する触覚提示手段を備えることを特徴とする。
(もっと読む)
顔特徴点検出装置および眠気検出装置
【課題】 実用化が容易であり、高い精度で表情を捉えることができる顔特徴点検出装置および眠気検出装置を提供する。
【解決手段】 眠気検出装置20は、まず、撮影装置10により運転者3の顔画像を撮影して、運転者3の顔上の特徴点を取得するときに用いる個人情報モデルにおける2D基準顔と2Dテンプレートを作成する(S1)。次に、覚醒状態における特徴点を取得し(S2)、眠気を検出するタイミングで特徴点を検出して眠気レベルを推定する(S3)。眠気レベルに応じて、居眠り防止のための装置を動作させる信号を出力する(S4)。特徴点の取得は、撮影装置10により運転者3の顔画像を撮影し、その画像を2D基準顔および2Dテンプレートを変形してフィッティングし、撮影画像から特徴点の2次元座標を取得する。次に、共通モデルである3D基準顔とフィッティングして3次元座標を求める。
(もっと読む)
情報処理装置
【課題】累積ヒストグラムによる分析結果が、直感的に理解し易い表示方法を提供する。
【解決手段】ヒストグラム情報を記憶する記憶部と、ヒストグラム情報を解析して累積ヒストグラムを演算する演算部と、累積ヒストグラムの情報を表示装置へ出力する出力部とを備える情報処理装置において、演算部は、累積ヒストグラムの階級をX軸、度数をY軸、その二つに相当する成分を有する累積ヒストグラムの数をZ軸として集計を行い、複数の累積ヒストグラムを三次元的に表示可能な情報として前記出力部へ出力し、出力部は、複数の累積ヒストグラムを三次元的に表示可能な情報を表示装置へ出力する。
(もっと読む)
物体認識装置、物体認識方法及びプログラム
【課題】画像認識に必要な計算を、CPUの1次キャッシュあるいは2次キャッシュに格納できるデータ量にて行うことが可能な画像認識装置を提供する。
【解決手段】本発明の物体認識装置は、認識対象物体の第2特徴点各々に登録画像の第1特徴点を対応させ、第1及び第2の特徴点の法線ベクトルの角度差θによるCOS、SIN値を、第1特徴点毎に求める評価値算出部と、回転された変位ベクトルと第2特徴点から、候補座標点を求める候補座標点演算部と、候補座標点を座標軸に各々投影し、投影された軸座標点に対応し、COS値をCOS積算値として積算するCOS値積算部と、候補座標点を複数の座標軸に各々投影し、投影された軸座標点に対応し、SIN値をSIN積算値として積算するSIN値積算部と、各軸座標点の組合せで、各軸座標点のCOS及びSIN積算値の総合値を求める積算値加算部と、総合値が閾値を超えると、認識対象物体との登録画像と一致を判定する認識対象物体判定部とを有する。
(もっと読む)
2次元図形マッチング方法
【課題】逐次性を有する高速な2次元図形マッチング方法を提供することを目的とする。
【解決手段】入力地図および参照地図に新たな点を挿入し(S102,S108)、入力地図および参照地図の局所特徴を抽出し(S104,S110)、抽出された参照地図の局所特徴を記憶し(S112)、抽出された入力地図内の局所特徴の一つをクエリとし、類似する参照地図内の局所特徴を検索し(S114)、検索結果から解候補としての仮説を含む仮説集合を生成し(S116)、仮説集合に含まれる各仮説の確からしさを評価する(S118)。この際、参照地図の局所特徴のLSH関数によるハッシュ値に対応するビンに記憶し(S112)、クエリに関する局所特徴のLSH関数によるハッシュ値に対応するビンを検索し(S114)、点と仮説との対である点仮説ペアを評価する順序を計画し(S118a)、最良の仮説を選出する(S118b)。
(もっと読む)
画像処理装置
【課題】画像データの情報量を有効に活用して、画像中の1つのグループとしてまとめるべき撮像対象を的確にグループ化することが可能な画像処理装置を提供する。
【解決手段】撮像手段2で撮像された画像Tを複数の領域rに分割する画像処理装置1において、画像T中の一の画素pi,jと隣接する画素pとの各画像データDの差分ΔDが第1閾値ΔDth未満である場合には一の画素pi,jを隣接する画素pとグループ化し、最終的に得られた各グループgをそれぞれの画像Tの各領域rとして画像Tを複数の領域rに分割する処理手段6と、一の画素pi,jを含むグループgにおける画像データDの平均値Daveを算出する平均値算出手段7とを備え、処理手段6は、一の画素pi,jの画像データDi,jと隣接する画素pが属するグループgの前記平均値Daveとの差分δDが第2閾値δDth以上である場合には一の画素pi,jと隣接する画素pとをグループ化しない。
(もっと読む)
1 - 20 / 119
[ Back to top ]