
Fターム[5L096FA05]の内容
Fターム[5L096FA05]に分類される特許
1 - 20 / 95
情報端末装置
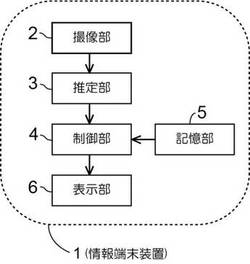
【課題】簡素且つ高精度に撮像対象の大きさを推定して、その大きさに応じて表示情報の制御を行うことのできる情報端末装置を提供する。
【解決手段】撮像部2と、撮像対象の大きさを推定する推定部3と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5と、推定された大きさに関連する情報を記憶部5から読み出して制御する制御部4とを備え、推定部3が、撮像対象の一面上に設けられた大きさ及び形状が既知のタグを検出するタグ検出部と、タグの周囲に形成される撮像対象の領域を抽出する領域抽出部と、検出タグの配置とタグの所定配置との比較に基づいて、検出タグの撮像部2に対する姿勢を推定する姿勢推定部と、推定姿勢に基づいて抽出された撮像対象の一面の大きさと、その一面を除外した奥行き部分の大きさとを推定するサイズ推定部とを含むよう情報端末装置1を提供する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム

【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
画像処理装置、直線検出方法及びコンピュータプログラム
【課題】読み取った画像から原稿の境界を精度よく検出することが可能な画像処理装置、直線検出方法、コンピュータプログラムを提供する。
【解決手段】情報処理装置20は、入力画像からエッジ画素を抽出するエッジ画素抽出部210と、抽出したエッジ画素からハフ変換を用いて直線候補を抽出する直線候補検出部221と、直線候補から所定距離内にあるエッジ画素に対して最小二乗法を用いて直線を検出する直線検出部222と、を有する。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
個体識別装置、個体識別対象物、個体識別方法、及びプログラム
【課題】 微細物質を対象物にランダムに付与し、個体識別に利用する個体識別システムにおいて、精度を損なわずに高速に対象物の検証を行うことが可能な個体識別装置等を提供する。
【解決手段】 異なる種類の微細物質20A、20Bを異なる数量で対象物2に付与する。個体識別装置4は少数付与された微細物質20Aの配置パターンに基づく特徴量データをインデックス認証用データ6Aとしてデータベース5に登録するとともに、多数付与された微細物質20Bの配置パターンに基づく特徴量データを本認証用データ6Bとして登録する。認証処理では、対象物2から、まず微細物質20Aの配置パターンに基づき算出された特徴量データと、データベース5のインデックス認証用データ6Aを照合し、認証成功すると、微細物質20Bの配置パターンに基づき算出された特徴量データと、データベース5の本認証用データ6Bを照合する。
(もっと読む)
情報処理装置、物体追跡方法および情報処理プログラム
【課題】誤った追跡対象の早期削除と、正しい追跡対象が一時的に隠れている状況での追跡維持とを両立させ、追跡対象数が変化する場合にも正しく物体追跡を行なうこと。
【解決手段】画像中の物体を検出する物体検出手段と、追跡対象とすべき追跡対象物体の情報を記憶する記憶手段と、物体検出手段が検出した検出物体と追跡対象物体との対応度を決定する対応度決定手段と、対応度を用いることにより、検出物体が追跡対象物体であるのか、追跡対象物体が画像中において一時的に隠れているのか、または、追跡対象物体の情報を記憶手段から削除すべきなのかを判定する判定手段と、を備えた情報処理装置。
(もっと読む)
画像検索方法、システム、及びプログラム
【課題】大規模画像データベースから特定の平面オブジェクト検索をする。
【解決手段】クエリ画像からの特徴をセグメントまたはポリゴンとしてグループ化する(700)。後続の変換においては少なくとも2つの特徴を利用する。セグメントまたはポリゴンの変換を実行してクエリ画像に対するインライア特徴を判定する(701)。変換は、ハフ変換であってもよい。クエリ画像のインライア特徴を、対応する登録画像のインライア特徴と比較する(702)。比較は、パラメータ空間またはハフ空間で行なってもよい。
(もっと読む)
テキスト強調方法及び装置、並びにテキスト抽出方法及び装置
【課題】コンピュータが画像におけるテキストを強調する方法を提供する。
【解決手段】コンピュータが、少なくとも一行のテキストを含む原画像を取得する現画像取得ステップ、前記原画像における任意な原画素点からその近傍集合における各近傍画素点までの直接差異度及び間接差異度に基づいて、前記各原画素点の原輝度値又は/及び原色値に対して筆画二次元フィルタリングを行い、前記原画像のフィルタリング後の更新輝度値又は/及び更新色値を取得する更新値取得ステップ、及び、前記原画像のフィルタリング後の前記更新輝度値又は/及び更新色値により、対応する前記原輝度値又は及び原色値をそれぞれ置換し、前記原画像に対応するテキスト強調画像を生成する強調画像生成ステップを実行する。前記近傍集合の範囲は、前記原画素点を中心とし、且つ辺長がwである正方形となり、wは前記原画像の高さより小さい。
(もっと読む)
画像解析プログラム、画像解析装置および撮像装置
【課題】画像上で前景と背景とを簡単に素早く区分する。
【解決手段】画像解析プログラムは、時系列的に撮像された複数の画像を入力する画像入力ステップと、複数の画像の中の第1の画像上で指定された前景または背景の位置を入力する位置入力ステップと、第1の画像上の前景以外の部分または背景の部分に、複数の画像上での背景の動きを検出するための目標領域を設定する領域設定ステップと、複数の画像の中の第2の画像上で目標領域の位置を探索する領域探索ステップと、第1の画像から第2の画像までの目標領域の位置の変化に基づいて背景の動きを検出する動き検出ステップと、動き検出ステップで検出した背景の動きに基づいて、複数の画像上で前景部分と背景部分とを区分する区分ステップとをコンピューターに実行させる。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】対象画像を分割して得られるブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】予め設定されたカテゴリごとに予め学習済みの分離平面を用いて対象画像を分割して得られるブロック画像をカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、対象画像を複数のブロックに分割して複数のブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、特徴量空間におけるブロック画像の特徴量の大きさに対応する座標位置及び分離平面を用いて、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13と、を備え、特徴量演算部12は、ブロック画像の特徴量として、当該ブロック画像の画像情報から算出される局所的特徴量及び対象画像全体の画像情報から算出される全体特徴量を用いる。
(もっと読む)
入力画像における歪を検出する方法、入力画像における歪を検出する装置およびコンピューター読み取り可能な媒体
【課題】書物などのスキャン画像は背に近い所に歪みを有する。歪みを検出し、補正する方法を提供する。
【解決手段】特徴画像を用いてスキャンされた本の画像を分割化しページ領域に対応するピクセルをマップしページオブジェクトを作成してページの縁を検出する。ページオブジェクトの2つの間にある無地の背景領域を見つけ、ページ縁を分析してその形状を検出し、形状を分析して本の背の終端点を検出することにより本の背領域が検出される。ページ縁を用いて特徴画像を調べ、ピクセル値の上から下および下から上の下降勾配を検出し元のスキャンされた画像における影歪みの角を判定する。締め付けおよび湾曲歪みも検出される。ベジェ曲線を用いてページ上で検出された3つの歪みの各々をモデル化する。検出された歪みはまず台形の補正領域を定義することにより補正される。強度、締め付け、および湾曲補正が次に台形の補正領域内の線に沿って適用される。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】ホワイトボードや紙資料等の撮影対象の矩形を撮影する作業を効率化させる。
【解決手段】画像処理装置3は、撮影装置2から画像データを入力し、当該画像データから線分を検出する。そして、画像処理装置3は、ホワイトボード1の領域に係る情報に基づいて、画像データに含まれるホワイトボード1を囲む四角枠を、検出した線分から決定する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段と、次元毎に算出される上記領域特徴量の差分値が所定値より小さいことを示す値を含む複数の値のうちの一つに当該差分値を、上記画像識別子の各次元の値として量子化する量子化手段とを備え、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
特徴領域抽出装置、特徴領域抽出方法、及びプログラム
【課題】車両の検知に特有の誤検知を防止する。
【解決手段】領域抽出部102は、画像から二輪車の特徴部分に類似する領域と四輪車の特徴部分に類似する領域とを抽出する。組抽出部103は、領域抽出部102が抽出した領域の中から中心位置同士の距離が所定の閾値以下となる領域の組を抽出する。除外部105は、組抽出部103が抽出した組を構成する領域のそれぞれに異なる車両の特徴部分が含まれる可能性が低い場合に、当該組の構成する領域の一方を抽出結果から除外する。
(もっと読む)
食事画像解析方法、食事画像解析プログラムおよび食事画像解析装置
【課題】食事のバランスを容易にユーザに把握させることを課題とする。
【解決手段】食事画像解析装置10の取得部13aは、食事画像を取得する。そして、抽出部13bは、食事画像から器の位置を検出し、食事部分のみを抽出する。続いて、作成部13cは、食材画像の画素値を色ごとに分類し、食材画像の色頻度分布を作成する。そして、色算出部13dは、色種類数および色割合を算出する。続いて、スコア算出部13eは、色種類数および色割合に基づいて、スコアを算出する。その後、出力部12は、算出されたスコアを出力する。
(もっと読む)
画像処理装置、画像符号化システム及び画像復号システム
【課題】ユーザの指定なしに、画像データの特徴部分を表す画像データを生成する。
【解決手段】画像処理装置10は、特徴量検出部14と、最適領域生成部162と、出力データ生成部18と、を備える。特徴量検出部14と、入力画像データの特徴部分を検出し、検出した特徴部分を含む特徴領域の位置を示す特徴領域情報を生成する。最適領域生成部162は、特徴領域情報に基づいて、前記特徴領域のサイズに応じた最適領域の位置を示す最適領域情報を生成する。出力データ生成部18は、最適領域情報に基づいて、入力画像データのうち最適領域の画素を抽出し、抽出した画素に基づいて出力画像データを生成する。
(もっと読む)
画像識別子抽出装置
【課題】画像識別子を照合する画像識別子照合装置を提供すること。
【解決手段】画像を識別する情報である画像識別子を照合する照合部を備える。上記画像識別子は、当該画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量が当該次元毎に算出され、次元毎に算出された前記領域特徴量の差分値の絶対値に基づいて、当該差分値が前記画像識別子の各次元の値として量子化されている情報であり、かつ、当該差分値が所定の値より小さい場合には特定の値に量子化されている。照合部は、照合する2つの画像識別子を構成するある次元のそれぞれの値がいずれも上記特定の値の場合に、各次元の値の少なくとも一方が上記特定の値でない場合とは異なる処理を用いて当該2つの画像識別子を照合する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】精度良く線分を抽出することができる画像処理装置を提供する。
【解決手段】画像に含まれる線分を抽出する画像処理装置であって、画像の所定数の画素からなる処理単位ごとに、濃度が変化する方向である濃度変化方向を決定する濃度変化方向決定部と、濃度変化方向が反対向きの一対の処理単位を処理単位対とし、濃度変化方向と垂直な方向に連続して配置されている複数の処理単位対を含む処理単位群を線分として抽出する線分抽出部とを備える。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
1 - 20 / 95
[ Back to top ]