
Fターム[5L096FA08]の内容
Fターム[5L096FA08]に分類される特許
1 - 20 / 39
物体判別方法
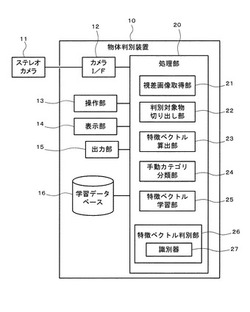
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
警告表示方法および警告表示プログラム

【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
真贋判定支援装置、真贋判定装置、及びプログラム
【課題】真贋の高精度な判定に寄与する真贋判定支援装置、真贋判定装置、及びプログラムを提供する。
【解決手段】ランダムパターンを有する固有の特徴を表面に備えた用紙Pの表面の予め定められた領域20に対して交差するように配置されてランダムパターンを含む予め定められた領域20に対応する鏡像を生成する鏡面体18と、予め定められた領域20及び鏡面体18で生成された鏡像を特定の撮影面に撮影するカメラ16と、を有する。
(もっと読む)
画像認識装置、画像認識方法及び画像認識用コンピュータプログラム
【課題】画像に写っている被写体に関する情報が無くても、画像上の所定の領域の窪みを検出可能な画像認識装置を提供する。
【解決手段】画像認識装置は、画像上の所定の領域の輪郭線上に位置する複数の輪郭点を検出する輪郭抽出部(61)と、複数の輪郭点のうち、輪郭線の一部を、所定の領域の外を通って短絡する短絡経路の両端となる第1及び第2の輪郭点を検出する短絡経路検出部(64)と、第1の輪郭点と第2の輪郭点間の輪郭線に沿った経路と短絡経路とで囲まれた所定の領域に含まれない部分を、短絡経路の長さまたは輪郭線に沿った経路の長さに基づいて窪み部分か否か判定する窪み判定部(65)とを有する。
(もっと読む)
情報端末装置
【課題】特別なセンサ等を用いることなく、撮像部に対する被写体の空間的な動作によって表示部の情報を制御できる情報端末装置を提供する。
【解決手段】撮影画像より色特徴に基づいて被写体領域を抽出する領域形成部21、被写体領域を包含する第一の外接多角形を形成する第一多角形形成部221、第一の外接多角形の内部より被写体領域を排除した内部背景領域を抽出する内部背景抽出部222、内部背景領域を包含する第二の外接多角形を形成する第二多角形形成部223、第一の外接多角形、内部背景領域及び第二の外接多角形に基づいて、被写体の撮影部1に対する位置及び姿勢を推定する姿勢推定部23及び、推定された位置及び姿勢に基づいて表示部3を制御する制御部4を備えて情報端末装置10を提供する。
(もっと読む)
画像処理装置、電子内視鏡用プロセッサ装置、画像処理方法
【課題】内視鏡画像の色以外の情報に基づいて、内視鏡画像の各部における病変部である可能性を評価する。
【解決手段】ステップS100において、各画素のRGB信号から画素値Gと画素値Rの比G/Rを求め、血液の吸収帯に関わる色情報から対象画素が病変部である可能性を評価する。これに並行して、ステップS102において、画像の輝度信号から、所定空間周波数領域の輝度信号を抽出する。ステップS104において、脳回転状の模様など、腸管等における表面構造に関わる情報を抽出された輝度信号に基づき判定し、対象画素が病変部である可能性を評価する。ステップS100、ステップS104の評価に基づき、ステップS106において総合的に対象画素が病変部である可能性について評価し、該評価に基づき各部分の危険度を示す画像を生成する。
(もっと読む)
移動物体検出装置
【課題】オクルージョンが生じている状況下においても、複数の移動物体の存在を検出することができる移動物体検出装置を提供する。
【解決手段】
監視領域を撮影する撮像部と、撮像部の視軸と異なる光軸で監視領域に光を照射するように設置される照明部と、撮像部にて撮影した画像から移動物体を検出する画像処理部と、出力部とを少なくとも備えた移動物体検出装置であって、画像処理部は、照明部から光を照射した監視領域を撮像部にて撮影した入力画像と基準画像とを比較して基準画像から変化した変化領域を抽出する変化領域抽出手段と、変化領域の特徴を用いて変化領域を移動物体画像と影画像に分割する分割手段と、影画像の特徴を用いて複数の移動物体により生じた影であるか否かを判定して出力部に判定結果を出力する判定手段と、を有することを特徴とした。
(もっと読む)
形状認識装置
【課題】2次元構造の断面データが表す形状曲線を近似するための処理を簡単に行うことが可能な形状認識装置を提供する。
【解決手段】形状認識装置Cは、3次元データが表わす外面形状の曲率が第1所定値を超える領域を抽出する曲率除外領域抽出手段14と、曲率の変化量が第2所定値を超える領域を抽出する変化量除外領域抽出手段15と、曲率除外領域抽出手段14により抽出された領域と変化量除外領域抽出手段15により抽出された領域とを除外領域として設定する除外領域設定手段16と、3次元データにおける設定領域の形状を詳細に反映した詳細形状データと粗く反映したベース形状データとを取得すると共に、夫々の形状データから除外領域に含まれるデータを除外して夫々の修正形状データを生成し、夫々の修正形状データの曲率に基づいて外面形状の歪値を抽出する形状評価手段20と、を備える。
(もっと読む)
凹凸検査装置、凹凸検査方法
【課題】対象物に照射される光の強さの変動やむらの影響を受けることなく、対象物の凹凸に関するテクスチャを検出することを可能にする。
【解決手段】距離センサ1は対象物10の表面の3次元計測を非接触で行う。距離画像生成部2は、距離センサ1により計測された対象物までの距離を画素値とする距離画像を生成する。距離画像はテクスチャ評価部3に入力され、テクスチャ評価部3は、距離画像の画素値を用いて同時生起行列を生成し、同時生起行列から対象物10の凹凸に関するテクスチャを表す特徴量を算出する。テクスチャ評価部3で算出した特徴量は表示装置6に出力される。また、テクスチャ評価部3は、距離画像からテクスチャを求める凹凸ではない距離変化の情報をノイズとして除去した修正距離画像を生成し、修正距離画像の画素値から対象物の凹凸に関するテクスチャを表す特徴量を算出する機能を有する。
(もっと読む)
マスク着用判定装置
【課題】ひとがマスクを着用しているか否かを精度良く判定する。
【解決手段】マスク着用判定装置10は、乗員カメラ11から出力された顔画像において水平エッジを抽出する水平エッジ抽出部21と、水平エッジの抽出結果のうちから、輝度値判定部22により水平エッジの輝度値が第1輝度値以上であると判定され、かつ、水平エッジの水平方向長さが所定値以上または水平エッジの鉛直方向高さと水平方向幅との比が所定比以下である水平エッジを選択する水平エッジ選択部23と、選択された水平エッジよりも上下方向下方の所定領域の輝度値が第2輝度値以上である場合に、ひとがマスクを着用していると判定するマスク着用判定部24とを備える。
(もっと読む)
画像パターン検出補正装置および画像パターン検出補正方法
【課題】
2値化された画像データから一定パターンサイズ以下となる任意のパターンの検出および補正に必要なマッチングデータ格納データ容量およびパターンの検出の演算量を大幅に削減する。
【解決手段】
内部ブロックに隣接するすべての外部ブロックに第1のデータを設定され、内部ブロックの特定の頂点にあたるブロックに第2のデータを設定されたマッチングデータを記憶するマッチングデータ記憶手段と、0または1に2値化された複数のブロックから構成される画像データとマッチングデータを比較し、画像データとマッチングデータの対応する位置のデータが適合する場合に適合と判定するパターンマッチング手段と、パターンマッチング手段が適合と判定した場合に、マッチングデータの内部ブロックと比較される位置のブロックのうち1に設定されたブロックのデータを0に補正するデータ補正手段とを備える。
(もっと読む)
配列方向検出装置、配列方向検出方法および配列方向検出プログラム
【課題】点群に含まれる点列における複数の点の配列方向を容易かつ高精度に検出する。
【解決手段】配列方向検出装置では、検出対象である配列方向におよそ平行であることが判明している暫定配列方向に長く、かつ、その長さが配列方向に隣接する2つの点811の間の距離の最大値である点間最大距離の3倍以上である略矩形状の領域内に存在する点群8が撮像され、点群8の画像から凸包82が生成される。そして、凸包82の(−X)側の部分凸包821aおよび(+X)側の部分凸包821bにそれぞれ含まれる複数の線分のうち最長の線分を方向指示線分825a,825bとして特定し、方向指示線分825a,825bから、暫定配列方向を基準とする方向の平均値を配列方向として取得することにより、点群8に含まれる点列81における複数の点811の配列方向を容易かつ高精度に検出することができる。
(もっと読む)
物体端の位置決め方法及びシステム
【課題】特殊な機器又は衣服を装着することなく物体(人体)の2本のリム(脚)の下端を位置決めする。
【解決手段】原画像に前景処理を施して前景画像を取得し、この前景画像に係る多数の変向点を取得する。これら変向点の接続は折線を形成する。各変向点を隣接する2つの変向点に接続する両線分の挟角に基づいて、各変向点を凸点又は凹点のいずれかに分類し、選定された多数の凸点(a1〜a4)及び選定された多数の凹点(b1、b2)を選択する。この選定された凸点(a1〜a4)のうちの2つ(a1,a2)をそれぞれ仮端部として選択する。これら2つの仮端部と両仮端部間に位置する選定された凹点(b1)の接続は三角形を形成する。前記2つの仮端部に基づいて、物体の2本のリムの下端を位置決めするための2つの位置決め端部を決定する。
(もっと読む)
目の形態分類マップ
【課題】目の形態特徴分析法と、メーキャップによる形態操作法とを統合する美容ツールを提供する。
【解決手段】上下まぶたによって形成される眼裂の輪郭形状であって眼裂の上下径と左右径の比率で特定される目のフレーム形態と、瞼溝と上下まぶたの隆起の凹凸形状で特定される目のフォルム形態と、目頭を通る水平線と目頭と目尻を結ぶ対角線のなす角度で特定される目の角度形態の3つの目の形態において、被分類対象者の目の形態を標準バランスの目の形態と対比し、前記3つの形態における両者のそれぞれの乖離を求め、標準バランスの目と被分類対象者の目とのフレーム形態における乖離の程度に基づいて被分類対象者の目のフレーム形態を配置するフレーム軸と、標準バランスの目と被対象者の目とのフォルム形態との対比に基づいて被分類対象者の目のフォルム形態を配置するフォルム軸とからなり、両軸を互いに直交して設けた図表からなることを特徴とする。
(もっと読む)
2値画像を領域分割するための凹点検出方法
【課題】2値画像に含まれる領域を複数の部分領域に分割するために、当該領域の輪郭線上の凹点を検出する方法を提供する。
【解決手段】領域から生成される凸包の内部に領域外の画素が存在しない、という条件で凸領域を定義する。この下に領域の輪郭線を、当該領域が局所的に凸領域となる複数の区間に分けて、区間同士が接続する部分を凹点とする。これにより、経験的なパラメタ決定を必要としない凹点検出を可能とする。
(もっと読む)
有糸分裂像検出装置および計数システム、および有糸分裂像を検出して計数する方法
少なくとも1つの染料で染色された生検標本の画像内の有糸分裂像を検出して計数する方法およびシステムは、画像をコンピュータ処理で色濾過し、該画像内の有糸分裂像を示す有色の画素を特定すること、画像内の互いに連結された有糸分裂の画素をコンピュータ処理で抽出し、それによって有糸分裂の画素の塊を生成すること、有糸分裂の画素の塊をコンピュータ処理で形状濾過および群化して、有糸分裂像の候補を生成すること、塊の位置で生検標本画像をトリミングすることによって、有糸分裂像のサブ画像を抽出すること、有糸分裂像の候補から2つの特徴群を2つの個別のコンピュータ処理で抽出すること、抽出された2つの特徴群に基づいて、有糸分裂像の候補のどれが有糸分裂像かをコンピュータ分類処理で決定すること、生検標本組織の平方単位当たりの有糸分裂像の数を計数すること、を含む。 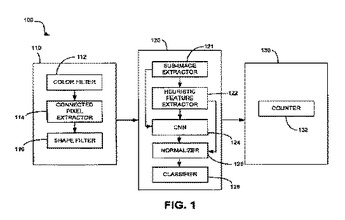 (もっと読む)
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラム、撮像装置
【課題】顔画像の目などの局所的に暗い構造を、エッジとして的確に検出することができる方法を提供すること。
【解決手段】画像処理方法において、複数の画素からなる画像を取得し、取得した画像に基づき局所的に周辺より画素値がへこんでいる凹構造のエッジを検出し、検出した凹構造のエッジに基づきエッジ画像を生成する。
(もっと読む)
輪郭抽出装置、輪郭抽出方法および輪郭抽出プログラム
【課題】ノイズ成分の影響を受けにくく、かつ画素データがなだらかに変化する箇所の輪郭を抽出できる輪郭抽出装置を提供する。
【解決手段】本輪郭抽出装置の制御部100は、対象画像から1行分の画素データを順に抽出し(S21)、得られた画素データ群により表されるデータ折れ線の凹部を検出するための2つの検出折れ線を表す2つの検出データ群を算出し(S22)、得られた検出データ群のそれぞれと、画素データ群との差分値がともに閾値を超えないx座標を求めることにより、データ折れ線の凹部に対応する画素からなる輪郭位置を判定し(S23)、以上の処理を全行に渡って繰り返す(S24)。よって画素データを累積的に加算する場合のようにノイズ成分の影響を受けることがなく、かつ上記検出折れ線により画素データがなだらかに変化する箇所の輪郭を正確に抽出できる。
(もっと読む)
曲線物体輪郭線の特徴評価方法及び装置
【課題】画像から曲線物体の輪郭線を抽出し、その特徴を的確に評価する。
【解決手段】画像から曲線物体の輪郭線を抽出し、その特徴を評価する際に、特徴を含む設定区間を、特徴に向けて順次せばめて行った際に、特徴が再び検出された時のくり返し検出数である多重度を求め、該多重度に応じた評価値を用いる。ここで、前記多重度を用いて、輪郭線の山の特徴を評価することができる。更に、輪郭線上にランダムに発生させた不定点に応じた評価値を加えることができる。又、不定点の評価値の最大値が、山の評価値の最小値よりも小さくなるようにすることができる。
(もっと読む)
1 - 20 / 39
[ Back to top ]