
Fターム[5L096FA24]の内容
Fターム[5L096FA24]に分類される特許
1 - 20 / 235
人検出装置、人検出方法及び人検出プログラム
被写体検出装置、被写体検出方法及びプログラム
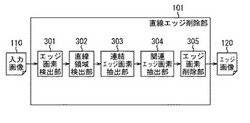
【課題】背景を含む画像から被写体の頭部領域を高精度に検出できるようにする。
【解決手段】検出したエッジ画素に基づいて、ハフ変換を用いて直線を表すパラメータρ、θを検出し、直線パラメータρ、θに基づいて、検出された複数のエッジ画素を含むように所定の幅wの直線領域を検出する。次に、全ての直線領域以外におけるエッジ画素の中から、直線領域と連結する連結エッジ画素を抽出し、注目する直線領域と連結する連結エッジ画素との交点の間の注目する直線領域内のエッジ画素を関連エッジ画素とする。そして、関連エッジ画素以外の直線領域上のエッジ画素を削除する。
(もっと読む)
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム

【課題】直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】入力画像I中のエッジ点piの勾配を算出する勾配方向算出部12Cと、エッジ点をハフ変換して直線を検出する直線検出部12Dと、ハフ変換での投票用の第1のハフ空間部H1と、ハフ変換での投票用の第2のハフ空間部H2とを備える。直線検出部は、ハフ変換する際、第1及び第2の軸によって構成される2次元座標系で、エッジ点の勾配方向と第1の軸方向とのなす角度αiと、2次元座標系の原点に対するエッジ点の方向と第1の軸(x軸)方向とのなす角度βiとの角度差が90度以上であるエッジ点を通る直線群を第1のハフ空間部に投票し、上記角度差が90度未満の場合であるエッジ点を通る直線群を第2のハフ空間部に投票し、第1及び第2のハフ空間部のそれぞれの投票結果に基づいて、入力画像中の直線を検出する。
(もっと読む)
車線境界線認識装置
【課題】車線境界線の検出精度の改善。
【解決手段】車両の進行方向の路面の画像を所定時間の経過毎に取得し(ステップ210)、その画像に基いて輝度の変化点をエッジ点として抽出する(ステップ220)。更に、抽出されたエッジ点を通る白線候補線を抽出し(ステップ230)、その抽出された白線候補線の中から所定の条件を満足する白線候補線を車線境界線として選択する(ステップ250)。この車線境界線認識装置は、前記抽出されたエッジ点のうちの前記白線候補線が通過するエッジ点の個数をシグナル量Sと見做すとともに、前記抽出されたエッジ点のうちの前記白線候補線が通過しないエッジ点の個数をノイズ量Nと見做し、前記ノイズ量に対する前記シグナル量の割合に応じた値(S/N比)に基づいて算出される画像評価値(ステップ240を参照。)が閾値よりも小さい場合には前記画像に基く前記車線境界線の選択結果を破棄する(ステップ260)。
(もっと読む)
画像処理装置、直線検出方法及びコンピュータプログラム
【課題】読み取った画像から原稿の境界を精度よく検出することが可能な画像処理装置、直線検出方法、コンピュータプログラムを提供する。
【解決手段】情報処理装置20は、入力画像からエッジ画素を抽出するエッジ画素抽出部210と、抽出したエッジ画素からハフ変換を用いて直線候補を抽出する直線候補検出部221と、直線候補から所定距離内にあるエッジ画素に対して最小二乗法を用いて直線を検出する直線検出部222と、を有する。
(もっと読む)
車両運転支援システム
【課題】無駄のない効率的なハフ投票を行い、走行車線検出の処理速度を上げることができる。
【解決手段】撮像部10によって撮像された画像から、テールランプ検出部32によって自車両の直前前方を走行している前方車両のテールランプを分光フィルタを介して検出する。そして、検出したテールランプの画像に基づいて前方車両の位置を検出する。白線検出部33によって、前方車両の位置に基づいて路面の走行車線の候補エッジを抽出し、抽出した候補エッジにハフ変換処理を施して走行車線を決定する。
(もっと読む)
車線判別装置
【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
直線検出装置、直線検出方法、直線検出プログラム及び撮影システム
【課題】 直線をより確実に検出可能な直線検出装置、直線検出方法、直線検出プログラム及び撮影システムを提供する。
【解決手段】 直線検出装置30は、撮像手段20で撮像された撮影画像22内のエッジ点23について、撮影画像に基づく球面画像40内の各エッジ点の対応点である対応エッジ点の球面勾配ベクトルを算出する勾配算出部34と、球面画像における直線投影面60の法線ベクトルnを表す極角θ及び方位角φで構成されるハフ空間70に、各対応エッジ点を含む直線投影面の法線ベクトルを投票する投票部35と、所定の閾値以上の投票数を有する法線ベクトルで規定される直線投影面を決定することで、撮影画像内の直線を特定する直線特定部36とを備える。投票部は、各対応委エッジ点の位置ベクトルと直交する法線ベクトルであって、法線ベクトルと対応エッジ点における球面勾配ベクトルとの内積が0より大きい法線ベクトルを投票する。
(もっと読む)
線分および円弧検出装置
【課題】ハフ変換を利用して精度よく線分あるいは円弧を検出することを課題とする。
【解決手段】ハフ変換部14は、第1〜第3成分データ102A〜102Cに対して輪郭抽出処理を実行し、第1〜第3輪郭データ103A〜103Cを生成する。第1〜第3輪郭データ103A〜103Cの各画素は0〜255の画素値を有する。ハフ変換部14は、第1〜第3輪郭データ103A〜103Cの各点に対してハフ変換を実行する。ハフテーブル15には、第1〜第3輪郭データ103A〜103Cの各点の画素値、すなわち輪郭強度の値が加算値として集計される。検出部16は、各成分の集計値を総合評価し、線分あるいは円弧を検出する。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
線分および円弧検出装置
【課題】ノイズの影響を抑制し、高い精度で線分あるいは円弧の検出を行うことを課題とする。
【解決手段】ハフ変換部14は、輝度画像データ102に対して輪郭抽出処理を実行し、輪郭画像データ103を生成する。輪郭画像データ103の各画素は0〜255の画素値を有する。ハフ変換部14は、輪郭画像データ103の各点に対してハフ変換を実行する。ハフテーブル15には、輪郭画像データ103の各点の画素値、すなわち輪郭強度の値が加算値として集計される。検出部16は、集計値に基づき、線分あるいは円弧を検出する。
(もっと読む)
被写体位置判定方法およびシステム
【解決手段】一実施形態によれば、被写体位置判定方法は、各被写体が複数の特徴を有する複数の被写体を含むデータを分析し、前記データから前記特徴を抽出する工程と、前記データから抽出された各特徴は少なくとも一つの予測に一票を投じるものであり、データベースに保存された特徴と前記データから抽出された特徴をマッチングし、被写体の予測を得る工程と、nを少なくとも一つの整数とし、分析すべき前記被写体がn個のパラメータで記述され、各パラメータがハフ空間の次元を定義する、ハフ空間において分析すべき予測を表す工程と、他の特徴からの投票に合致しない投票よりも、他の特徴からの投票と合致する投票に高く重み付けする制約を与える工程と、前記重み付けされた投票を用いて前記ハフ空間における極大値を得る工程と、前記データ内における前記被写体を位置判定するため、前記極大値と関連付けられた前記予測を識別する工程とを備える。 (もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
画像処理方法およびシステム
【課題】2D被写体の検出と分離、カメラ姿勢推定、3D形状位置合わせおよび3D画像認識を含む画像処理における被写体の姿勢を推定する方法を提供する。
【解決手段】画像データを分析するための装置はプロセッサを含む。該プロセッサは、被写体の姿勢の複数の予測を得るために前記画像データを分析するよう構成され、前記予測は前記被写体の予測姿勢のインジケーションを含んでおり、前記予測姿勢は共通の座標系の位置、方向、スケールに関して表現され、2つの被写体姿勢間の距離を計算することで前記予測姿勢を比較することにより前記予測をグループ化するように構成され、前記距離は距離関数を用いて計算される。
(もっと読む)
直線検出装置および直線検出方法
【課題】点の数だけなく、直線に関する他の特性も考慮した上で、ハフ変換を利用した直線検出を行うことを課題とする。
【解決手段】ハフ変換部14は、輪郭強調された2値画像データ104に対してハフ変換を実行する。ハフテーブル15には、ハフ変換後の集計値が格納される。直線算出部161は、集計値を補正する。たとえば、直線の原点からの距離に応じた重みづけにより集計値が補正される。あるいは、直線の傾きに応じた重みづけにより集計値が補正される。直線検出部16は、補正された集計値に基づき、直線を検出する。
(もっと読む)
画像検索方法、システム、及びプログラム
【課題】大規模画像データベースから特定の平面オブジェクト検索をする。
【解決手段】クエリ画像からの特徴をセグメントまたはポリゴンとしてグループ化する(700)。後続の変換においては少なくとも2つの特徴を利用する。セグメントまたはポリゴンの変換を実行してクエリ画像に対するインライア特徴を判定する(701)。変換は、ハフ変換であってもよい。クエリ画像のインライア特徴を、対応する登録画像のインライア特徴と比較する(702)。比較は、パラメータ空間またはハフ空間で行なってもよい。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】画像処理装置において、ユーザが原稿を手で押さえて読み取り時の紙面を正常に保持しながら、特定の操作を必要とすることなく、所望のタイミングで撮影画像を記録可能とする。
【解決手段】撮影画像から原稿の輪郭成分を抽出するページ輪郭検出部32と、撮影画像において特定領域A1、A2を設定する特定領域設定部33と、特定領域においてユーザの手指を認識する指認識部31と、指認識部にて認識された手指の動きを検出する動き検出部35と、動き検出部の検出結果に基づき、ユーザからの動作指令が与えられたと判定した場合に、撮影画像を記録する画像記録部36とを備え構成とする。
(もっと読む)
直線検出装置および直線検出方法
【課題】画像内の方向や位置に依存することなく、同様の基準で、ハフ変換を利用した直線検出処理を行うことを課題とする。
【解決手段】ハフ変換部14は、輪郭強調された2値画像データ104に対してハフ変換を実行する。ハフテーブル15には、ハフ変換後の集計値が格納される。直線算出部161は、2値画像データ104内の各直線について、各直線が2値画像データ104を切り取るときの交点を求め、交点間距離Lenを算出する。正規化部162は、ハフテーブル15に格納された集計値を交点間距離Lenで除算し、集計値を正規化する。直線検出部16は、正規化された集計値に基づき、直線を検出する。
(もっと読む)
車載白線認識装置
【課題】 制御対象とすべき白線を適切に選択できる車載白線認識装置を提供する。
【解決手段】 複合線判定部70は、白線特徴統合部60にて出力された尤度が所定の閾値以上である白線候補それぞれに対して複数のテンプレートによるパターンマッチングを行い、また、白線候補抽出部30によるハフ変換の投票数に応じて破線のピッチを判定して、それらの結果に基づいて、様々な線種類に対して、ある白線がその線種類である確からしさを示すパラメータをまとめた確信度分布を出力し、当該白線の線種類を判別する。制御対象白線選択部80は、複合線を構成する短い破線を除いて車両に最も近い白線を制御対象の白線として選択する。
(もっと読む)
認識装置および方法、プログラム、並びに記録媒体
【課題】画像認識に係る技術について、画像の欠損、ノイズなどに対する耐性をさらに高めることができるようにする。
【解決手段】入力画像から得られる所定の特徴点を抽出し、入力画像に含まれる所定の図形を特定するための軌跡が表示された画像であって、特徴点に対応する軌跡画像を、ハフ変換を用いて取得し、認識対象オブジェクトが含まれている学習画像に基づいて得られた軌跡画像と、認識対象オブジェクトが含まれていない学習画像に基づいて得られた軌跡画像とから求められた複数の特徴量を用いた統計学習により生成された識別器を用い、特徴量に基づいて、入力画像から認識対象オブジェクトを検出する。
(もっと読む)
1 - 20 / 235
[ Back to top ]