
Fターム[5L096FA25]の内容
Fターム[5L096FA25]に分類される特許
1 - 20 / 138
オブジェクト抽出装置、オブジェクト抽出方法、及びプログラム
運転支援システム、運転支援方法、及び、プログラム
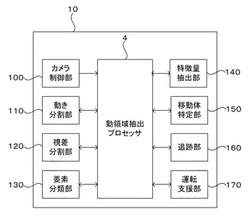
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
物体認識システム及び物体認識装置

【課題】ラインセンサ等の撮像装置を用いて取得した物体の撮像データを用いてその物体を認識する物体認識システムにおいて、物体の通過速度によって撮像データに含まれる物体の画像が歪むため対象物のテンプレートデータとのマッチングの精度が低下し物体の認識精度が低下するという課題があった。
【解決手段】物体認識部34は、速度検出部32で検出された物体の速度に応じて、撮像装置1、2で取得された撮像データに含まれる物体の画像をサイズ変更し、その変更後の撮像データとテンプレートデータとをマッチングして物体を認識するので、精度高く物体認識ができる。
(もっと読む)
画像検査装置、画像検査方法、及びプログラム
【課題】多種多様な定型帳票を対象に、帳票種識別を精度良く行う。
【解決手段】基準画像を入力する基準画像入力手段と、被検査画像を入力する被検査画像入力手段と、基準画像と被検査画像とを整合する画像整合手段と、整合された画像に対して座標変換処理を施すことにより複数のパラメータを算出する算出手段と、複数のパラメータの各値と、複数のパラメータのそれぞれに対応して予め定められた複数の基準値とをそれぞれ比較する比較手段と、比較手段の比較結果に基づいて、被検査画像の受け入れの可否を判断する判断手段と、を含む。
(もっと読む)
画像識別装置および画像識別方法
【課題】専用の帳票を必要とせず、罫線のない帳票にも適用可能で、しかも類似帳票を正しく識別することができる画像識別装置および画像識別方法を提供する。
【解決手段】第1の画像としてのマスター画像を入力するマスター画像入力部101と、第2の画像としてのデータ画像を入力するデータ画像入力部102と、マスター画像に対して指定されるマスク領域の組を入力するマスク領域入力部104と、マスター画像とデータ画像とを整合させる画像整合部103と、整合されたマスター画像とデータ画像との間で、マスク領域を除いた差分を抽出する差分抽出部105と、抽出された差分の大きさにもとづいてマスター画像とデータ画像との相違度を出力する相違度出力部106と、を備える。
(もっと読む)
画像検索方法、システム、及びプログラム
【課題】大規模画像データベースから特定の平面オブジェクト検索をする。
【解決手段】クエリ画像からの特徴をセグメントまたはポリゴンとしてグループ化する(700)。後続の変換においては少なくとも2つの特徴を利用する。セグメントまたはポリゴンの変換を実行してクエリ画像に対するインライア特徴を判定する(701)。変換は、ハフ変換であってもよい。クエリ画像のインライア特徴を、対応する登録画像のインライア特徴と比較する(702)。比較は、パラメータ空間またはハフ空間で行なってもよい。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】画像処理装置において、ユーザが原稿を手で押さえて読み取り時の紙面を正常に保持しながら、特定の操作を必要とすることなく、所望のタイミングで撮影画像を記録可能とする。
【解決手段】撮影画像から原稿の輪郭成分を抽出するページ輪郭検出部32と、撮影画像において特定領域A1、A2を設定する特定領域設定部33と、特定領域においてユーザの手指を認識する指認識部31と、指認識部にて認識された手指の動きを検出する動き検出部35と、動き検出部の検出結果に基づき、ユーザからの動作指令が与えられたと判定した場合に、撮影画像を記録する画像記録部36とを備え構成とする。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】画像からグローバル動きベクトルを適切に抽出できるようにする。
【解決手段】クラスタリング部42は、所定のサイズのブロック単位で求められるローカル動きベクトルLMVと、遅延バッファ44に格納されている複数のクラスタ毎の代表となる動きベクトルとの距離を求め、距離が最小となる動きベクトルの属するクラスタに、ローカル動きベクトルLMVを分類し、分類したクラスタの情報とローカル動きベクトルLMVとを出力する。平均値算出部43−1乃至43−5は、それぞれ自らのクラスタのローカル動きベクトルLMVを蓄積して、その平均となる動きベクトルを算出し、これをクラスタを代表する動きベクトルとして出力する。GMV決定部45は、クラスタを代表する動きベクトルのうち、要素数の最も多い動きベクトルをグローバル動きベクトルGMVとして出力する。本技術は、画像処理装置に適用することができる。
(もっと読む)
ビデオにおけるカメラ動きの型を検出する方法および装置
【課題】ビデオにおけるカメラの動きの型をより効果的かつ精確に検出するよう、ビデオにおけるカメラ動きの型を検出する方法および装置を提供する。
【解決手段】本発明の諸実施形態は、ビデオにおけるカメラ動きの型を検出する方法および装置を開示する。該方法は:ビデオにおける隣接するフレームどうしの間の第一のズーム動きパラメータを推定する段階と;前記第一のズーム動きパラメータが第一の事前設定条件を満たす場合に、対応するビデオ・セグメントにおいて事前設定された数の間隔をもつフレームどうしの間の第二のズーム動きパラメータを推定する段階と;前記第二のズーム動きパラメータが第二の事前設定条件を満たす場合に、前記ビデオ・セグメントのカメラ動きの型を、ゆっくりしたズームとして識別する段階とを含む。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
(もっと読む)
適応フィルタリングを利用したデジタルイメージ安定化方法
【課題】補償ウィンドウオーバーエクスカーションのヒストリー(history)に基づいてビデオフレームの場面で止められた/背景客体を代表する主要(principal)変換/補償変換P(n)を適応的にフィルタリングする段階を含むデジタルイメージ安定化方法を提供する。
【解決手段】デジタルイメージ安定化方法ビデオは、タイルモーションベクトル(Tile MV)グループの複数の変換のそれぞれと特徴点モーションベクトル(FP MV)グループのそれぞれとのスコアリングに基づいて、フレームの場面内の停止/背景客体を表わす主要変換を選択する段階と、停止(背景)グループのヒストリーと複数のモーションベクトルグループのそれぞれのヒストリーとに基づいて大型移動客体を除外させる段階と、を含む。
(もっと読む)
画像処理装置、位置合わせ方法及びプログラム
【課題】変形する対象の画像を抽出し、抽出結果を基に対象の位置を補正することを可能とすることを目的とする。
【解決手段】画像を取得する画像取得手段と、画像取得手段で取得された画像から特徴量を抽出する特徴抽出手段と、対象のモデルと特徴抽出手段で抽出された画像の特徴量とを基に対象の尤度を算出する尤度算出手段と、尤度算出手段で算出された尤度を基に画像内にある対象の検出領域を検出する検出手段と、モデルと検出手段で検出された検出領域とに基づいて、対象が変動している部分と変動していない部分とを識別する識別手段と、識別手段で識別された対象が変動していない部分を基にモデルと検出領域との位置合わせを行う位置合わせ手段と、を有することによって課題を解決する。
(もっと読む)
顔向き検出装置
【課題】ユーザの顔向きを精度良く検出できる顔向き検出装置を提供すること。
【解決手段】顔向き検出装置は、交差する縦縞及び横縞から構成された縞模様の光をユーザの顔に照射する(S11)。その顔をカメラで撮像する(S12)。撮像した顔画像から、光の縞模様を構成する矩形に対応する矩形対応部分をそれぞれ特定する(S13)。矩形対応部分ごとに、各矩形対応部分の変形具合に基づいて各矩形の法線方向を算出する(S14)。三次元モデルDB40に記憶された三次元の顔モデルの各部位の法線方向と各矩形の法線方向との誤差を算出する(S15)。誤差が閾値未満か否かを判断する(S16)。誤差が閾値より大きい場合には(S16:No)、閾値未満になるように顔モデルの三次元パラメータを変更する(S17)。誤差が閾値未満になったときの顔モデルの顔向きを運転者の顔向きとして決定する(S18)。
(もっと読む)
画像処理方法及び装置
【課題】より正確に文書画像における歪曲を取り除き、文書位置合わせの品質を確かにし、それによって、帳票テンプレートの正確性を高めることができる画像形成装置等を提供する。
【解決手段】罫線が抽出されて、実二次元空間にマッピングされる。マッピングされた罫線と罫線テンプレートのテンプレートセルとの間の対応が決定される。互いに対応するセルの対ごとに、テンプレートセル内の各画素の位置が、セル間のアフィン変換に基づいて、実二次元空間における実位置にマッピングされる。実位置に隣接する位置にある画像内の複数の画素の画素値に基づく画素値は、実位置に対応するテンプレートセル内の画素の画素値として生成される。画像に対応する合成画像は、生成された画素値を有するテンプレート内の画素と罫線テンプレートの罫線とをマージすることによって生成される。帳票テンプレートは、複数の画像に対応する合成画像に基づいて得られる。
(もっと読む)
画像処理装置及びその制御方法
【課題】撮像装置の動きに起因して生じる被写体のずれを効率的に補正できるようにする。
【解決手段】対象画像を複数の領域に分割し、当該複数の領域のうちの少なくとも1つの領域を局所領域として設定する。また画像処理装置は、複数の領域ごとに座標変換係数を算出し、局所領域の少なくとも1つの注目点について、局所領域及び当該局所領域の近傍領域についての座標変換係数を用いて対象画像のずれを補正した場合の補正量をそれぞれ算出する。そして、局所領域の座標変換係数から得られた補正量と、近傍領域の座標変換係数から得られた補正量との差分が予め定められた限界量に収まっているかを判断する。このとき、補正量の差分が予め定められた限界量に収まっていない場合、補正量の差分が予め定められた限界量に収まるように、局所領域を含む複数の領域ごとの座標変換係数を再度求め、得られた新たな座標変換係数で、対象画像を領域ごとに補正する。
(もっと読む)
空間における変化領域検出装置及び方法
【課題】測位センサーを用いなくても、空間における変化領域を精度良く検出すること。
【解決手段】変化領域検出装置10は、入力画像(撮像画像)の特徴点の中から参照画像を決定するために用いる特徴点を選択する対応点探索用特徴点選択部13と、入力画像の特徴点と参照画像の特徴点との中から幾何変換パラメータを算出するために用いる特徴点を選択する幾何変換パラメータ算出用特徴点選択部18と、入力画像の特徴点と参照画像の特徴点との中から撮像画像と参照画像との類似度を求めるために用いる特徴点を選択する類似度算出用特徴点選択部20と、を有する。
(もっと読む)
環境における3次元(3D)オブジェクトの3D姿勢を求めるための方法
【課題】カメラによって前記環境から捕捉した画像から特徴を抽出することによって、環境における3次元(3D)オブジェクトの3D姿勢が求められる。
【解決手段】前記特徴を前記環境の3Dモデルにマッチングして、対応を求める。前記対応を用いて、前記画像のカメラ基準系および前記環境のワールド基準系を対応する中間カメラ基準系および対応する中間ワールド基準系に変換する。前記中間カメラ基準系および前記中間ワールド基準系に幾何学的制約を適用して、制約付き中間ワールド基準系および制約付きワールド基準系を取得する。次に、前記制約付き中間ワールド基準系および前記制約付きワールド基準系のパラメーターから前記3D姿勢を求める。
(もっと読む)
広告印刷システム、複合機、及び複合機のプログラム
【課題】既に印刷された広告がスキャナによって読み取られ、印刷された場合は、ユーザ毎の特典ポイントにならない。
【解決手段】スキャナにより読み取られた画像は特典付与対象となる広告に形成された特典画像か否かが判定される。判定によって特典画像であると判定された画像がカラーインクジェットプリンタによって、被記録媒体に印刷された印刷回数がカウントされる。カウカウントされた印刷回数に基づき、ユーザに付与される特典ポイントを決定する。決定された特典ポイントをユーザに対応して記憶する。
(もっと読む)
パターンに基づくコンピュータビジョンを用いるコンピュータ装置のための入力
【課題】ユーザの足や手の近接度を追跡する技術を提供する。
【解決手段】カメラから取得した、面上に形成された構造的に符号化されたパターンの少なくとも一部の画像を解析してカメラの位置を決定する。前記構造的に符号化されたパターンは複数の要素を含む。各要素には前記面に関する前記要素の位置および向きを特定する情報が符号化されている。コンピュータプログラムが、前記画像中の一またはそれ以上の要素の少なくとも一部を特定し、前記画像中の前記一またはそれ以上のパターン要素に符号化されている前記情報から、前記面に対する前記カメラの位置を決定する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子装置
【課題】簡易な構成で、より容易にカメラの位置や姿勢を推定する。
【解決手段】合成画像生成部103は、推定の基準となる基準画像を構成する画素の位置を、基準画像を構成する画素に対応する撮像画像上の画素の位置に射影する射影パラメータに基づいて、射影パラメータにより射影される撮像画像上の位置に存在する各画素により構成される合成画像を生成し、評価部104は、合成画像と基準画像との相関を表す評価関数を生成し、パラメータ更新部106は、評価関数に基づいて、射影パラメータを更新し、更新後の射影パラメータに基づいて、撮像部の位置又は姿勢の少なくとも一方を推定する。本発明は、例えば、カメラの位置や姿勢を推定し、その推定結果に基づく処理を行なうコンピュータ等に適用できる。
(もっと読む)
1 - 20 / 138
[ Back to top ]