
Fターム[5L096FA32]の内容
Fターム[5L096FA32]に分類される特許
1 - 20 / 785
物体検出装置、監視カメラ、及び物体検出方法
対象物変化検出装置および対象物変化検出方法
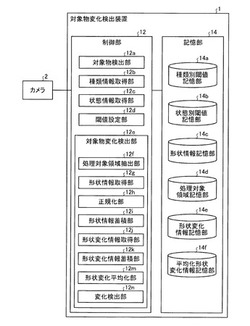
【課題】車両周辺の対象物の変化を迅速かつ正確に検出できる対象物変化検出装置および対象物変化検出方法を提供することを課題とする。
【解決手段】本発明は、画像から対象物の属性を検出し、検出した対象物の属性内の当該対象物の種類を示す種類情報を取得し、取得した種類情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定し、検出した対象物を含む画像から、設定した変化検出用閾値を用いて、対象物の変化を検出する。ここで、本発明は、検出した対象物の属性内の当該対象物の状態を示す状態情報を取得し、取得した種類情報および取得した状態情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム

【課題】一部の同一被写体の位置が異なる場合でも、画像の類似判定の精度向上を図ることができる。
【解決手段】ペア画像取得部41は、判定を行う複数の画像であるペア画像を取得する。対応点探索部82は、ペア画像取得部41により取得された複数の画像のデータについて、類似する複数の画素領域を夫々特定する。ベクトル算出部83は、対応点探索部82により特定された画像領域同士の距離を夫々算出する。閾値設定部84は、ベクトル算出部83により夫々算出された距離に基づいて、閾値を設定する。類似画像判定部44は、ベクトル算出部83により夫々算出された距離のうち、閾値設定部84設定された閾値以下の距離に対応する画素領域同士に基づいて、ペア画像取得部41により取得された複数の画像のデータが類似するか否かを判定する。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
パターン認識装置およびパターン認識方法
【課題】より高い識別精度を得ることが可能なパターン認識装置および方法を提供する。
【解決手段】パターン認識方法は、各特徴項目の項目値の平均値m1,m2,・・・,mkに対する、i番目のデータセットyi1,yi1,・・・,yikのゼロ点比例回帰直線y=βimの傾きβiを第一の縮約特徴項目として算出するステップ(SB)と、ゼロ点比例回帰直線y=βimとi番目のデータセットとの偏差を標準偏差sjで除した値の二乗和Sei’=Σ((yij−βimj)/sj)2を、各データセットについて算出して、Sei’の平方根に比例する量であるσi’を第二の縮約特徴項目として算出するステップ(SC)と、第一の縮約特徴項目と、各データセットに対する第二の縮約特徴項目とに基づいて評価距離Dを算出して、評価距離Dに基づいて判断を行なうステップ(SD)とを備える。
(もっと読む)
パターン測定方法
【課題】走査型電子顕微鏡で得られるパターンを撮像した画像から、フォトマスクのOPCパターンの寸法を精度良く且つ容易に測定することができるパターン測定方法を提供することを目的とする。
【解決手段】本発明のパターン測定方法は、フォトマスクのOPCパターンのうち、所望の範囲のパターンを包含する一回り大きい測定対象領域を設定し、測定対象領域のパターンの寸法を微小な領域毎に測定し、寸法の測定値を統計的に処理したものを曲線で近似し、近似曲線で表れるデータ群のうち、所望の範囲のパターン寸法に相当するデータ群の平均値を、所望の範囲のパターン寸法として推定する。
(もっと読む)
情報処理方法、情報処理装置
【課題】 Manifold固有の表面形状を、許容できる程度に保存し、且つパターン分類に適した、データ表現方法、及びその表現方法を利用した、パターン識別方法に係る技術を提供すること。
【解決手段】 それぞれ異なるクラスに属する処理データと共に、当該処理データが属するクラスを示すラベルデータを入力する(S20)。入力したそれぞれの処理データ間の距離関係を求める(S22)。クラス間のクラス間分離度を設定する(S23)。距離関係を示す情報を、ラベルデータと、クラス間分離度を示す情報と、に基づいて更新する(S24)。更新された情報が示す距離関係を近似するデータ写像関係を示す情報を求める(S25)。
(もっと読む)
プログラム、情報処理装置及びセグメント抽出方法
【課題】表示器の種類や外光の状況によらず、各セグメントのON/OFFを適切に判定すること。
【解決手段】複数のセグメントを用いて表される値が少なくとも1つ撮像された画像から、値を含む領域画像を取得し、領域画像内の前記値毎に、セグメントに囲まれる第1領域及び第2領域の輝度値を取得し、複数のセグメントにおける各セグメントの輝度値と、第1領域又は第2領域の輝度値とに基づき、各セグメントがONであるか否かを判定する処理をコンピュータに実行させるプログラム。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】色の劣化が生じた画像からでも、もともとの色領域を正確に抽出することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】前景特徴量算出部11は、それぞれの画素を対象画素として、その対象画素を含む予め決められた範囲の画素の色に対する対象画素の色の違いを示す特徴ベクトルを、予め決められた範囲の画素の色の平均色から対象画素の色への色空間におけるベクトルとして算出する。統合判定部12は、統合対象の二つの画素または領域についての前景特徴ベクトルの類似度に従って、統合の可否を判定する。領域統合部13は、統合判定部12で統合すると判定された二つの画素または領域を1つの領域に統合する。統合する際には、統合後の領域の前景特徴ベクトルを算出しておく。終了判断部14で終了条件を判定し、終了でない場合には統合判定部12に戻って、終了条件が満たされるまで処理を繰り返す。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】検出対象エッジに対して類似形状の非検出対象エッジを持つような状況下で照明の変化が起こった場合でも、検出対象エッジのみを安定して検出することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】サンプリング領域毎の平均輝度値に基づいて特徴量を設定し、エッジ選択のための閾値を特徴量ヒストグラムから求め、求めた閾値と、予め記憶しておいた検出対象エッジ、非検出対象エッジの特徴量との相対関係に基づき、検出対象エッジのみを選択する。このように、検出対象ワークの入力画像に対し、毎回エッジ特徴量を計算して、検出対象エッジと非検出対象エッジを分離するための特徴量の閾値を動的に算出できるので、照明装置の劣化等が原因で入力画像内の輝度変動が大きくなった場合でも、安定して検出対象エッジと非検出対象エッジとを分離し、的確に検出することができる。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
眼球検出システムおよび眼球検出方法
【課題】ロバスト性が高く正確に対象者の眼球を検出可能な眼球検出システムを提供する。
【解決手段】本発明に係る眼球検出システム100は、ターゲット画像上での中心座標および拡大倍率を含む染色体を持つ個体の集団を生成する初期個体集団生成部120と、テンプレート画像180上の画素値と中心座標および拡大倍率によって指定されるターゲット画像上の画素値とに基づいて個体それぞれの適応度を算出する適応度演算部122と、中心座標および拡大倍率によって指定されるターゲット画像上の対象者の眼球領域198を基準として前額領域190、眉毛領域192、上眼瞼領域194または頬領域196を仮定する領域仮定部124と、これらの領域に基づいて適応度を修正した修正適応度を算出する修正適応度演算部126と、修正適応度に基づき遺伝的操作を実行する遺伝的操作実行部130と、を備えることを特徴とする。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】文字認識処理によって文字画像ではない画像に対して文字画像であると認識された誤りを減少させるようにした画像処理装置を提供する。
【解決手段】画像処理装置の受付手段は、文字認識された文字候補画像と該文字候補画像に関する情報を受け付け、第1の判定手段は、前記受付手段によって受け付けられた文字候補画像に関する情報に基づいて、該文字候補画像が文字画像であるか否かを判定し、第2の判定手段は、前記第1の判定手段によって文字画像であると判定されなかった場合又は文字画像ではないと判定されなかった場合は、前記受付手段によって受け付けられた文字候補画像の特徴を抽出し、該文字候補画像が文字画像であるか否かを判定する。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
エッジ検出装置およびそのプログラム
【課題】照明等の撮影条件が変化した場合であっても、映像を構成するフレーム画像のそれぞれからエッジを正確に検出することができるエッジ検出装置およびそのプログラムを提供する。
【解決手段】エッジ検出装置1は、第1閾値および第2閾値を用いて映像を構成するフレーム画像ごとのエッジ点を検出するエッジ検出手段20と、現フレーム画像のエッジ点から当該エッジ点とエッジ勾配強度およびエッジ方向が類似する前フレーム画像のエッジ点を追跡するエッジ追跡手段40と、エッジ検出手段20によって検出されたエッジ点を分布化してガウス混合モデルを生成するとともに、エッジ追跡手段40によって追跡が成功したエッジ点を追加してガウス混合モデルを更新するモデル生成・更新手段50と、生成または更新されたガウス混合モデルの平均値および標準偏差から第1閾値および第2閾値を算出する閾値算出手段60と、を備えている。
(もっと読む)
画像処理方法およびシステム
【課題】2D被写体の検出と分離、カメラ姿勢推定、3D形状位置合わせおよび3D画像認識を含む画像処理における被写体の姿勢を推定する方法を提供する。
【解決手段】画像データを分析するための装置はプロセッサを含む。該プロセッサは、被写体の姿勢の複数の予測を得るために前記画像データを分析するよう構成され、前記予測は前記被写体の予測姿勢のインジケーションを含んでおり、前記予測姿勢は共通の座標系の位置、方向、スケールに関して表現され、2つの被写体姿勢間の距離を計算することで前記予測姿勢を比較することにより前記予測をグループ化するように構成され、前記距離は距離関数を用いて計算される。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】斜めから撮影された看板が写った画像から看板の画像領域を検出する。
【解決手段】画像中の画像領域の矩形度、該画像領域と該画像領域の周辺領域との色差、または該画像領域のエッジ比のうちいずれか1つまたは2つ以上の組に基づいて、画像から看板の画像を表す看板領域を選択する看板領域選択部23を備える。
(もっと読む)
1 - 20 / 785
[ Back to top ]