
Fターム[5L096FA34]の内容
Fターム[5L096FA34]に分類される特許
1 - 20 / 771
シフト及び画像の小さな歪みの推定
対象物識別装置および対象物識別方法
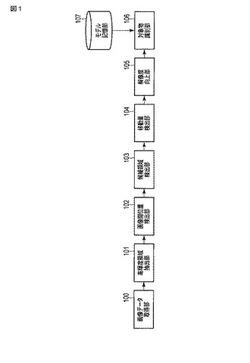
【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
相関演算装置

【課題】一律な照明変動や空間的に低周波な照明ムラに対するロバスト性が高く、かつSSDAの手法の適用により演算の高速化が可能な、新たな差分総和演算を行うことができる相関演算装置を提供する。
【解決手段】相関演算装置は、位置変数に依存した関数である第1関数データおよび第2関数データに対してローパスフィルタ処理を施し、第3関数データおよび第4関数データを生成するローパスフィルタ手段と、位置変数の1つの変数値における第1関数データと第4関数とを乗じた第1積データと、該変数値における第2関数データと第3関数データとを乗じた第2積データとの差分に基づき、該変数値における第1積データと第2積データとの相関値を算出し、変数値が変化する毎の相関値を積算して得られる積算値に基づき、第1関数データと第2関数データとの相関度を算出する相関演算手段とを備える。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置
【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 画像取り込みの際などに起きる画素のずれによって特徴点の位置がずれてしまった場合であっても、精度良く個体識別を行うことができる個体識別装置等を提供する。
【解決手段】 個体識別装置100は、抽出された特徴点群の中から特徴量算出点Aを1つ特定し(S201)、特徴量算出点Aを除いた特徴点群の中から、特徴量算出点Aから近い順に特徴点A1〜Anを特定する(S202)。次に、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中で、特徴量算出点Aから最近傍の点を基準点Bとして特定し(S203)、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中から、所定数j個の参照点C1〜Cjを特定する(S204)。そして、特徴量算出点A、基準点B、及び参照点C1〜Cjの3つの点を用いて、特徴量算出点ごとに特徴量を算出する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】撮影時の照明光のスペクトル及び撮影手段の分光感度の少なくとも一方が異なる条件で撮影された複数の画像間での対応点検出精度を向上させる。
【解決手段】分光反射率画像生成部11a、11bで、マルチバンド画像の画素値、撮影時のカメラの分光感度、観察照明光のスペクトル、及び被写体の統計的性質から求められた先見情報を用いて、ウィナー推定により画素毎の分光反射率を推定し、推定した分光反射率を画素値とする分光反射率画像を生成する。RGB画像生成部12a、12bで、分光反射率画像と予め定めた照明光スペクトルと予め定めたカメラの分光感度とを掛けあわせてRGB画像を生成する。白黒画像生成部13a、13bで、RGB画像から白黒画像を生成し、位相画像生成部17a、17b、相関画像生成部18、及び対応点検出部19で、2つのマルチバンド画像間の対応点を検出する。
(もっと読む)
動きベクトル検出装置及び方法
【課題】回路規模の増大を抑えつつ、前後のフレームのそれぞれを基点として動きベクトルを検出することができる動きベクトル検出装置を提供する。
【解決手段】基点画素生成部5は、フレームf0またはf1内の画素データに基づいて基点画素fctrを生成する。探索範囲画素生成部6は、フレームf1またはf0内の画素データに基づいて探索範囲画素fmvsを生成する。スイッチ3,4によって1ラインごとにフレームf0,f1を交互に切り換える。動きベクトル候補選択部7は、フレームf0を基点とする動きベクトルMV0とフレームf1を基点とする動きベクトルMV1を交互に生成する。相関比較部8は、動きベクトルMV0,MV1の内、相関の高い方を動きベクトルMVとして選択する。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
画像識別情報付与プログラム及び画像識別情報付与装置
【課題】画像に関する相関情報を用いて画像に対して複数の識別情報を付与する画像識別情報付与プログラム及び画像識別情報付与装置を提供する。
【解決手段】画像識別情報付与装置1は、複数のクエリ画像120からそれぞれ特徴量を抽出する特徴抽出部3と、特徴抽出部3によって抽出された特徴量から学習モデル130を用いてクエリ画像120に付与すべき複数のラベルに対してそれぞれ量子化値を計算するアノテーションスコア量子化部5と、ラベルの数に対応した数の確率場モデルを有し、ラベル毎の量子化値を複数の確率場モデルに入力し、クエリ画像120毎に複数のラベルに対するスコアを出力するラベル推定部7とを備える。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
画像処理装置
【課題】予め想定された範囲外の要因が生じた場合でもパラメータの適正化を図ることができる。
【解決手段】テンプレートデータを用いてサーチ画像から対象物を認識するテンプレートマッチング処理を行う画像処理装置19において、テンプレートマッチング処理を行うためのパラメータを記憶するパラメータ記憶部14と、テンプレートマッチング処理における基準性能値を記憶する性能記憶部39と、テンプレートマッチング処理が終わるとその性能値を計測する性能値計測部43とを備え、性能値計測部で計測された性能値が基準性能値を下回る場合に、テンプレートマッチング処理のパラメータを調整する調整部38を備えている。
(もっと読む)
歩容解析方法、歩容解析装置及びそのプログラム
【課題】ユーザの歩容を精度良く解析できるようにすること。
【解決手段】歩容解析装置1は、ユーザの歩行時に計測された第1加速度データを時系列で受信する加速度情報受信部101と、前記第1加速度データに対して平滑化処理を行う平滑化処理部102と、前記平滑化処理後の第2加速度データ及び前記第1加速度データのそれぞれに対して周波数解析を行い、前記第2加速度データのパワースペクトラムからピーク周波数の候補を抽出し、前記第1加速度データのパワースペクトラムから前記候補の近傍のピーク周波数を検出し、当該ピーク周波数により前記ユーザの歩行周期Tを算出する歩行周期算出部103と、前記第1加速度データの自己相関関数を算出する自己相関算出部104と、前記歩行周期Tに基づいて前記自己相関関数におけるピークを検出するピーク検出部105とを備える。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
画像照合装置、画像照合方法及びコンピュータプログラム
【課題】画像照合を高速に実施するとともに、画像の類似性を高精度に判定することが可能な画像照合装置、画像照合方法を提供する。
【解決手段】画像照合装置1は、第1画像及び第2画像を複数のブロックに分割する画像分割部22、25と、第1画像及び第2画像について、各ブロックに含まれる画素の正規化画素値の総和及び二乗和に基づき、第1画像の特徴ベクトル及び第2画像の特徴ベクトルを算出する特徴ベクトル算出部23、26と、ラグランジュの未定乗算決定法を利用して導いた正規化相互相関の上限値を算出する式を用いて、第1画像の特徴ベクトル及び第2画像の特徴ベクトルに基づき、第1画像と第2画像の正規化相互相関の上限値を算出する上限値算出部27と、上限値が第1の閾値以上であるか否かに基づいて第1画像と第2画像を照合する第1照合部28とを有する。
(もっと読む)
顔画像検索システム、及び顔画像検索方法
【課題】より効率的に顔画像の検索を行うことができる顔画像検索システム、及び顔画像検索方法を提供する。
【解決手段】予め複数の顔特徴をデータベースとして記憶する記憶部と、画像データを受信する画像受信部と、前記画像データから顔画像を検出する顔検出部と、前記顔検出部により検出された前記顔画像から顔特徴を抽出する特徴抽出部と、前記特徴抽出部により抽出された前記顔特徴と、前記データベースに含まれている前記顔特徴との類似度を算出し、算出した類似度に基づいて検索結果を出力する検索部と、前記検索部により出力された前記検索結果の量を計測する計測部と、前記検索結果量が予め設定された閾値以上である場合、前記検索部により出力された前記検索結果を選別する選別部と、前記選別部により選別された前記検索結果に基づいて検索結果画面を生成する表示制御部と、前記検索結果画面を出力する出力部と、を具備する。
(もっと読む)
画像処理装置、画像処理方法及び集積回路
【課題】複数の画像について、粗いマッチングの処理及び詳細なマッチング処理を行う場合に並列に処理できる効率の良い画像処理装置を提供する。
【解決手段】画像処理装置は、p(pは2以上の整数)個のブロック画像と照合するための、複数の簡易パターンと、簡易パターン毎に対応付けられた複数の照合パターンとを記憶し、互いに異なる一のブロック画像が割り当てられ、全ての簡易データと、割り当てられたブロック画像とを用いた第1相関演算を行うp個の第1演算部と、前記ブロック画像全てについて、当該ブロック画像との前記第1相関演算により相関関係が最も高い簡易パターンに対応する照合パターンを順次読み出して、第2相関演算を行う第2演算部とを備え、各々の簡易パターンについて、前記第1演算部それぞれは、同一のタイミングで取得する。
(もっと読む)
画像特徴量抽出装置及びこれを用いた画像処理によるマーカ検出装置
【課題】画像中から閉曲線を抽出し、さらに閉出線に囲まれた内側部分の画像の輝度情報を抽出して整理し、画像特徴量を構成することにある。
【解決手段】画像中から閉曲線を抽出する閉曲線抽出部14と、閉曲線抽出部14により抽出された閉曲線に外接する最小矩形を計算する最小矩形抽出部15と、最小矩形抽出部15により計算された最小矩形から画像特徴量全体の回転方向を決定する回転方向決定部16と、閉曲線抽出部14により抽出された閉曲線に囲まれた内側部分の画像の輝度情報を抽出する輝度情報抽出部17と、閉曲線抽出部14、最小矩形抽出部15、回転方向決定部16及び輝度情報抽出部17により求められた閉曲線・回転方向・輝度情報を整理して画像特徴量を構成する画像特徴量構成部18と、を備えるので、対象物のサイズ変化・回転に影響を受け難い画像特徴量を抽出することができる。
(もっと読む)
1 - 20 / 771
[ Back to top ]