
Fターム[5L096FA59]の内容
Fターム[5L096FA59]に分類される特許
1 - 20 / 576
物体検出装置、物体検出装置の制御方法、およびプログラム
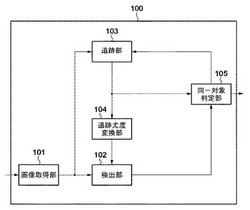
【課題】対象物体の姿勢変動やオクルージョンに対してロバストな検出を可能にする。
【解決手段】フレーム画像を順次取得する画像取得部と、フレーム画像から検出尤度を算出して、当該検出尤度に基づいてフレーム画像から対象物体を検出する検出部と、複数のフレーム画像のそれぞれから対象物体の追跡尤度を算出して、当該追跡尤度に基づいて複数のフレーム画像間で対象物体を追跡する追跡部と、を備える物体検出装置であって、検出部は、画像取得部により取得されたフレーム画像から追跡部により算出される対象物体の追跡尤度と、当該フレーム画像から検出部により算出される対象物体の検出尤度とに基づいて、当該フレーム画像から対象物体を検出する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム

【課題】人物の情報を得ることに対する関心度に応じた量の情報を提示する。
【解決手段】人物認識部102は、撮影された画像データに含まれる人物を認識する。関心度推定部107は、人物認識部102による認識結果に基づいて、情報を得ることに対する人物の関心度を推定する。情報取得部108は、人物に提示する対象となる情報を取得する。情報編集部109は、関心度推定部107により推定された関心度に基づいて、情報取得部108により取得された情報から人物に提示する情報を選択する。情報表示部110は、情報編集部109により選択された情報を出力させる。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラム
【課題】球面勾配ベクトルをより確実に算出可能な球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラムを提供する。
【解決手段】球面勾配算出方法は、複数の画素で離散的に表された離散球面に、撮影画像が投影された離散球面画像を形成する離散球面画像形成工程と、記離散球面画像を構成する複数の画素の各々の球面勾配ベクトルを、その球面勾配ベクトルを算出すべき画素の画素値と、その画素に隣接する画素の画素値と、その画素を構成する複数の辺の各々の長さ、その画素の面積と、その画素の中心からその画素を構成する複数の角部の各々への単位ベクトルとに基づいて算出する球面勾配算出工程と、を含む。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
画像処理装置、方法、及び画像表示装置
【課題】対象物の三次元位置を高精度で算出する。
【解決手段】実施形態の画像処理装置は、実施形態の画像処理装置は、第1取得部、第2取得部、第1設定部、第2設定部、第1算出部、及び第2算出部を備える。第1取得部は、対象物が複数の位置から撮像された複数の撮像画像を取得する。第2取得部は、前記対象物の仮三次元位置と、前記対象物の仮サイズを取得する。第1設定部は、実空間における前記仮三次元位置の近傍に少なくとも1つの探索候補点を設定する。第2設定部は、前記探索候補点を前記撮像画像に射影した射影位置毎に、前記対象物を探索するための探索窓であって、前記探索候補点の位置と前記仮サイズとに基づくサイズの前記探索窓を設定する。第1算出部は、前記探索窓内において、前記対象物が含まれるかどうかを示す評価値を算出する。第2算出部は、前記評価値に基づいて前記対象物の三次元位置を算出する。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
目標物を検出するための映像処理方法及び装置
【課題】ステレオカメラなどから獲得した映像の深さ情報のみを用いて目標物領域である手領域を抽出する方法を提供する。
【解決手段】映像の深さ情報を獲得する映像獲得部、映像の深さ情報に対するヒストグラムを生成するヒストグラム生成部、上記映像から検出対象の領域を検出するための深さ情報のしきい値を設定するしきい値設定部、上記設定された深さ情報のしきい値を用いて検出対象の領域を抽出するイメージ処理部、上記抽出された検出対象の領域が目標物に対応するか否かを検証するデータ検証部、及び上記抽出された検出対象の領域を格納する格納部を含み、映像の深さ情報を用いて目標物を検出できるようにする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置は、三値画像に基づいて、該三値画像の各層に対応する二値画像を生成する二値画像生成部であって、各二値画像において、二値画像が対応する層に属する画素は第1の階調を有し、他の画素は第2の階調を有する、二値画像生成部と、各二値画像において、境界に連結していない第2の階調連結領域を認識する連結領域認識部と、2つの二値画像における第2の階調連結領域の総面積の比率が第1の閾値よりも大きい、且つ2つの二値画像において第2の階調連結領域の総面積が小さい二値画像における第1の階調の領域と第2の階調連結領域の総面積が大きい二値画像における第2の階調連結領域との重なりかみ合い率が第2の閾値よりも大きい場合は、二つの二値画像における第2の階調連結領域の総面積が小さい二値画像が対応する層を文字層と決定し、もう一つの二値画像が対応する層を文字境界領域層と決定する文字層決定部と、を含む。
(もっと読む)
ビジュアル比較方法
【課題】クロスブラウザテストを実行するときに、ビジュアル比較及びエラー予測を改善する方法を提供する。
【解決手段】第1の複数の画像対が評価され、エラーと見なすのに適格な視覚的な対的相違が検出される。視覚的な対的相違は、位置、大きさ、色又はスタイルのうちの少なくとも1つに関する違いとし得る。評価された視覚的な対的相違に基づいて予測エンジンが訓練される。第2の複数の画像対に関する情報が受信される。これらの画像対の各々は、クライアントティア環境において実行されたイベント・ドリブン・アプリケーションの視覚的なエンドユーザ体験画面の少なくとも一部を有する。予測エンジンを用いて、これらの画像対の各々が評価され、エラーと見なすのに適格な視覚的な対的相違が検出される。少なくとも1つの評価された対的相違がエラーと見なされるべきでなかったことを指し示すユーザフィードバックに基づいて予測エンジンが再訓練される。
(もっと読む)
画像処理方法及び画像処理装置
【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
入力体の動き検出方法およびそれを用いた入力デバイス
【課題】1台の光学的撮像手段を用いた画像解析から、人の手先の三次元的な動きを検出することのできる入力体の動き検出方法と、この動き検出方法を用いた指示操作用の入力デバイスを提供する。
【解決手段】光源Lと、手先Hに対して光源Lと同じ側に配置された光学的撮像手段(カメラC)と、制御手段と、上記カメラCで得られた二次元画像から、拳の形状の分布重心の座標Gと指の先端の座標Tとを算出する形状認識手段と、上記拳の重心座標Gと指先座標Tの間の距離(d)を比較する動き判定手段と、を備えている。これにより、上記拳の重心座標Gと指先座標Tの間の距離(d)が、計測前後で縮小または拡大した場合に、その際の手先Hの動きを、上記カメラCの仮想撮影平面Pに対する指の上下動(Z方向の動き)として判断することができる。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、遮蔽時間長特徴検出部15が、連続的に取得された複数の画像を基にカメラ12の前の空間が塞がれている時間の長さの特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部が、命令を示す命令信号をコンピュータに送信する。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、画像特徴検出部15が、カメラ12の前の空間の少なくとも一部が塞がれることにより画像に生じる特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部17が、命令を示す命令信号をコンピュータ(112)に送信する。
(もっと読む)
顔認識装置、及び顔認識方法
【課題】認識精度の低下を抑止する。
【解決手段】実施形態の顔認識装置は、記憶手段と、入力手段と、顔検出手段と、保持手段と、抽出手段と、認識手段と、を備える。記憶手段は、人物毎に、当該人物の顔の特徴が表された顔特徴情報を記憶する。入力手段は、人物の少なくとも顔を含む画像情報を入力する。顔検出手段は、入力手段により入力された画像情報から、人物の顔が表された顔領域を検出する。保持手段は、検出された顔領域から顔の特徴を検出処理する検出手法を、検出処理の粗さの違いに基づいて複数保持する。抽出手段は、保持された複数の検出手法のうち、いずれか1つ以上を用いて、顔検出手段により検出された顔領域から、顔の特徴を示した特徴情報を抽出する。認識手段は、抽出手段により抽出された特徴情報と、記憶手段に記憶された顔特徴情報とに基づいて、画像情報に含まれていた人物を認識する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】色の劣化が生じた画像からでも、もともとの色領域を正確に抽出することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】前景特徴量算出部11は、それぞれの画素を対象画素として、その対象画素を含む予め決められた範囲の画素の色に対する対象画素の色の違いを示す特徴ベクトルを、予め決められた範囲の画素の色の平均色から対象画素の色への色空間におけるベクトルとして算出する。統合判定部12は、統合対象の二つの画素または領域についての前景特徴ベクトルの類似度に従って、統合の可否を判定する。領域統合部13は、統合判定部12で統合すると判定された二つの画素または領域を1つの領域に統合する。統合する際には、統合後の領域の前景特徴ベクトルを算出しておく。終了判断部14で終了条件を判定し、終了でない場合には統合判定部12に戻って、終了条件が満たされるまで処理を繰り返す。
(もっと読む)
画像処理装置、積分画像作成方法及びプログラム
【課題】積分画像の格納に必要な記憶容量を削減できる画像処理装置、積分画像作成方法及びプログラムを提供することを課題とする。
【解決手段】画像処理装置であって、画像を分けたブロック単位で、ブロックに含まれる1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値を格納した記憶手段と、ブロックに含まれる全ての座標の面積積分値を、記憶手段から読み出した1個の座標の面積積分値、1個以上の座標の垂直積分値、水平積分値及び輝度値により算出する制御手段とを有することにより上記課題を解決する。
(もっと読む)
1 - 20 / 576
[ Back to top ]