
Fターム[5L096FA60]の内容
Fターム[5L096FA60]に分類される特許
1 - 20 / 334
物体検出装置
【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
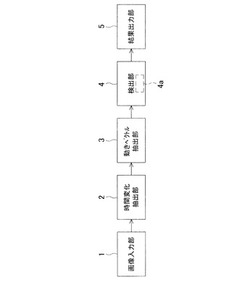
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
移動方向識別装置

【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 画像取り込みの際などに起きる画素のずれによって特徴点の位置がずれてしまった場合であっても、精度良く個体識別を行うことができる個体識別装置等を提供する。
【解決手段】 個体識別装置100は、抽出された特徴点群の中から特徴量算出点Aを1つ特定し(S201)、特徴量算出点Aを除いた特徴点群の中から、特徴量算出点Aから近い順に特徴点A1〜Anを特定する(S202)。次に、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中で、特徴量算出点Aから最近傍の点を基準点Bとして特定し(S203)、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中から、所定数j個の参照点C1〜Cjを特定する(S204)。そして、特徴量算出点A、基準点B、及び参照点C1〜Cjの3つの点を用いて、特徴量算出点ごとに特徴量を算出する。
(もっと読む)
ジェスチャー解読装置
【課題】ジェスチャ操作を、特定の場所で動作する必要があったり、解析動作が複雑で処理の負荷が大きく部屋に居る人の全体の平均的空調制御を行うものであった。
【解決手段】温度検知手段103と、温度検知手段103で画像化した温度レベルが所定値以下で画像化した温度レベル数以下の温度レベルに分類するための温度レベル分け手段104と、温度分布情報保持手段105と、保持情報のうち最も高い温度レベルの画素の重心から所定範囲を解読範囲とする解読枠設定手段106と、ジェスチャー解読手段102を備え、解読枠設定手段106で設定された解読範囲の温度レベルの時間変化を元に解読を行うことで、人の操作位置の制限をなくし、しかも、処理の負荷量を減じて、使用者の体表温度状態を反映したジェスチャーを認識することができる。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
入力体の動き検出方法およびそれを用いた入力デバイス
【課題】1台の光学的撮像手段を用いた画像解析から、人の手先の三次元的な動きを検出することのできる入力体の動き検出方法と、この動き検出方法を用いた指示操作用の入力デバイスを提供する。
【解決手段】光源Lと、手先Hに対して光源Lと同じ側に配置された光学的撮像手段(カメラC)と、制御手段と、上記カメラCで得られた二次元画像から、拳の形状の分布重心の座標Gと指の先端の座標Tとを算出する形状認識手段と、上記拳の重心座標Gと指先座標Tの間の距離(d)を比較する動き判定手段と、を備えている。これにより、上記拳の重心座標Gと指先座標Tの間の距離(d)が、計測前後で縮小または拡大した場合に、その際の手先Hの動きを、上記カメラCの仮想撮影平面Pに対する指の上下動(Z方向の動き)として判断することができる。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
画像処理プログラム、画像処理方法および画像処理装置
【課題】各画像の座標を対応付ける場合の計算量を削減すること。
【解決手段】画像処理装置100は、学習対象画像データ130aおよびカメラ視点の異なる視点変動画像データ群130bから特徴点を抽出し、各特徴点を分類して、登録テーブル130cを生成する。画像処理装置100は、登録テーブル130cの各特徴点群の重心座標と、認識対象画像データ130dから抽出した特徴点の座標とを比較して、学習対象画像データ130aの特徴点と認識対象画像データ130dの特徴点とを対応付ける。
(もっと読む)
特徴点抽出装置、特徴点抽出方法、プログラム
【課題】コストをかけることなく、モーションブラーのある画像から特徴点を安定して高速に抽出することができる特徴点抽出装置等を提供する。
【解決手段】特徴点抽出装置1の制御部11は、撮影画像取得機能21によって、撮影画像を取得する(S1)。次に、制御部11は、色領域分割機能22によって、撮影画像を色領域に分割する(S2)。次に、制御部11は、代表領域抽出機能23によって、色領域から代表領域を抽出する(S3)。次に、制御部11は、重心抽出機能24によって、代表領域の重心の座標を、特徴点として抽出する(S4)。
(もっと読む)
オブジェクト探索装置、映像表示装置およびオブジェクト探索方法
【課題】簡易な手法で高速かつ精度よくオブジェクトを探索できるようにする。
【解決手段】一実施形態に係るオブジェクト探索装置は、画面フレームに含まれるオブジェクトを探索するオブジェクト探索手段と、オブジェクト探索手段で探索されたオブジェクトを含むオブジェクト探索領域内の中心位置にオブジェクトが位置するように、オブジェクト探索領域の位置を補正するオブジェクト位置補正手段と、オブジェクト探索領域内のオブジェクト以外の背景領域が最小になるようにオブジェクト探索領域の面積をサイズ調整するオブジェクト領域補正手段と、オブジェクト領域補正手段で補正したオブジェクト探索領域に基づいて、オブジェクトの座標位置を検出する座標検出手段と、を備える。
(もっと読む)
物体識別システム及びプログラム
【課題】物体表面に形成される画像に基づくランダム性を利用して識別対象の物体のパターンと照合すべきパターンの数を絞り込む。
【解決手段】それぞれ表面に固有のパターンを有し、表面に画像が形成された複数の物体ごとの撮像画像を取得し、複数の物体ごとに、当該物体について取得された撮像画像における、当該物体に形成された画像に基づく特徴に応じて、当該物体を複数の分類のいずれかに分類し、複数の物体ごとに、当該物体の識別情報と、当該物体の表面が有するパターンを示すパターン画像と、当該物体の分類とを関連付けて登録し、複数の物体のうちの1つの対象物体を撮像した対象物体撮像画像に基づいて、当該対象物体の分類の候補を取得し、取得された分類に関連付けて登録されたパターン画像を取得し、取得されたパターン画像のうち、対象物体撮像画像と照合したパターン画像に関連付けられた識別情報を、対象物体の識別情報として特定する。
(もっと読む)
ピーク座標推定装置及びピーク座標推定方法
【課題】ピーク座標推定の精度を高めることのできるピーク座標推定装置を得る。
【解決手段】暫定ピーク検出部1は、暫定ピーク判定領域で、中心座標の信号値が周辺の座標に位置する信号値に比較して突出した値であった場合、中心座標を暫定ピーク座標として検出する。対象範囲決定部2は、暫定ピーク座標と、暫定ピーク座標の周辺に位置すると共に、予め定めた閾値以上の値を有する信号値の座標の集合を対象範囲として生成する。重心座標算出部3は、対象範囲において、暫定ピーク座標の信号値を重みとして重心座標を求め、重心座標を推定されたピーク信号の座標値として算出する。
(もっと読む)
接近物検知装置および接近物検知方法
【課題】接近物であるか否かの判定を迅速に行うことができ、静止物が接近物であるとの誤判定を低減して、接近物警報システムに適用する際の静止物を対象とした誤警報の出力を低減することができる「接近物検知装置および接近物検知方法」を提供すること。
【解決手段】接近物候補検出手段4によって立体物の最新の検出結果が取得される毎に、最新の検出結果に示される立体物の重心を算出する重心算出手段5と、前記重心の算出結果に基づいて、前記重心の移動方向を算出する移動方向算出手段6とを備え、接近物判定手段7は、前記重心の移動方向が、移動体への接近を示す方向である場合には、接近物であると判定し、前記重心の移動方向が、移動体からの離間を示す方向である場合には、接近物でないと判定すること。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
ステレオカメラのキャリブレーション方法及び情報処理装置
【課題】ステレオカメラのキャリブレーション方法及び情報処理装置において、簡単、且つ、短時間の作業で安定した精度の補正パラメータを生成可能とすることを目的とする。
【解決手段】右及び左カメラのキャリブレーションを行う際、点灯状態の右及び左発光部を撮影可能な位置に配置された反射体に対し、点灯された右発光部を右カメラで撮影した画像の位置座標を点灯された左発光部を左カメラで撮影した画像の位置座標に平行移動させる補正パラメータを求め、点灯された右及び左発光部を右カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、右カメラの撮影画像を回転補正する補正パラメータを求め、点灯された右及び左発光部を左カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、左カメラの撮影画像を回転補正する補正パラメータを求めるように構成する。
(もっと読む)
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
(もっと読む)
顔検出方法
【課題】単独の検出器でも、隠れが生じている顔を高い検出率で検出することができる顔検出方法を提供する。
【解決手段】評価対象画像内に設定したROI内に複数の選択領域を設定する。そして、ROI内に画像が顔であるか否かを判定するための1つ以上の画素で構成される複数の特徴量領域を設定し、特徴量領域内の評価対象画像に対して所定の評価を行ってスコアを求める。そして、選択領域と特徴量領域との重なりの程度に応じてスコアを選択領域に按分し、これらの処理を複数の特徴量領域の全てにおいて実行する。その後、複数の特徴量領域において按分されたスコアを集計し、選択領域が顔であるか否かを判定し、複数の選択領域でそれぞれ顔であるか否かを判定した結果に応じてROIが顔であるか否かを判定する。
(もっと読む)
画像処理装置、それを備えた画像表示装置及び撮像装置、画像処理方法、並びに画像処理プログラム
【課題】関心物体のフレームアウトを防ぐようにユーザを誘導する画像を作成する。
【解決手段】画像処理装置110は、画像データDを入力する。関心物体検出部112は、画像データDが表す画像における、関心物体の位置を特定する。フレームアウト確度判定部114は、関心物体検出部112が特定した関心物体の位置に基づいて、表示部126に表示させる画像の画像範囲から、関心物体がフレームアウトする確度と、フレームアウトする方向を算出する。変更値決定部116は、フレームアウト確度判定部114が算出したフレームアウトする確度及び方向に基づいて、画像データDが表す画像中の変更を施す領域である処理領域と、処理領域に施す変更とを決定する。表示画像処理部118は、変更値決定部116が決定した処理領域と処理領域に施す変更とに基づいて、画像データDが表す画像の処理領域に変更処理を施し、変更画像データD´を生成する。
(もっと読む)
1 - 20 / 334
[ Back to top ]