
Fターム[5L096FA69]の内容
Fターム[5L096FA69]に分類される特許
1 - 20 / 2,174
位置姿勢計測装置、その処理方法及びプログラム
人検出装置、人検出方法及び人検出プログラム
画像処理装置、画像処理方法
姿勢検出装置および姿勢検出方法
道路形状推定装置及びプログラム
情報処理装置、情報処理方法、及びプログラム
物体検出装置
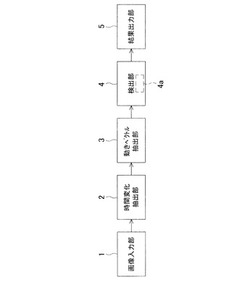
【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
物体判別方法

【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
物体検出装置、物体検出装置の制御方法、およびプログラム
【課題】対象物体の姿勢変動やオクルージョンに対してロバストな検出を可能にする。
【解決手段】フレーム画像を順次取得する画像取得部と、フレーム画像から検出尤度を算出して、当該検出尤度に基づいてフレーム画像から対象物体を検出する検出部と、複数のフレーム画像のそれぞれから対象物体の追跡尤度を算出して、当該追跡尤度に基づいて複数のフレーム画像間で対象物体を追跡する追跡部と、を備える物体検出装置であって、検出部は、画像取得部により取得されたフレーム画像から追跡部により算出される対象物体の追跡尤度と、当該フレーム画像から検出部により算出される対象物体の検出尤度とに基づいて、当該フレーム画像から対象物体を検出する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】人物の情報を得ることに対する関心度に応じた量の情報を提示する。
【解決手段】人物認識部102は、撮影された画像データに含まれる人物を認識する。関心度推定部107は、人物認識部102による認識結果に基づいて、情報を得ることに対する人物の関心度を推定する。情報取得部108は、人物に提示する対象となる情報を取得する。情報編集部109は、関心度推定部107により推定された関心度に基づいて、情報取得部108により取得された情報から人物に提示する情報を選択する。情報表示部110は、情報編集部109により選択された情報を出力させる。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
対象物識別装置および対象物識別方法
【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
横断歩道検出装置
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
画像認識装置及び方法
【課題】複数の対象を含む画像における各々の対象が何であるかを高精度で認識し、且つ各対象の存在する場所をも認識する画像認識装置を提供する。
【解決手段】部分領域抽出部11において、入力画像から矩形の候補領域を複数抽出し、各々を対象画像として、画像認識部12にて何であるかを認識させ、候補リストを得る。当該候補リストに挙げられた各々の対象について再度、再判定認識部13において対象画像が表す対象であるかを認識させて、最終的な認識結果となすよう、画像認識装置1を構成する。対象の位置は、部分領域抽出部11において抽出した矩形の位置として得られる。部分領域抽出部11で採用する画像特徴量よりも、再判定識別部で採用する画像特徴量を高精度にすることで、ある程度候補リストを絞り込んだ上で、少ない計算負荷によって高精度な認識結果が得られる。
(もっと読む)
姿勢推定装置、姿勢推定方法及びプログラム
【課題】高速かつ高精度に初期姿勢を推定すること。
【解決手段】姿勢推定装置は、第1対象物と第1対象物に近接する第2対象物とを撮影する撮影手段と、第1対象物の構成要素と、第2対象物の構成要素と、第1及び第2対象物の構成要素間で接触している確率と、が複数組、対応付けられた接触情報を予め記憶する記憶手段と、撮影された第1及び第2対象物を含む撮影画像と、記憶手段により記憶された接触情報と、に基づいて、確率の高い順で、第1対象物の構成要素と、第2対象物の構成要素との接触を検出する接触検出手段と、接触検出手段により検出された第1及び第2対象物の位置と、複数のリンクを相互に接続して第1対象物を表現した簡易モデルと、に基づいて、第1対象物の初期姿勢を算出し、算出した初期姿勢と、簡易モデルを第1対象物の形状により近似した詳細モデルと、に基づいて、最終的な第1対象物の初期姿勢を推定する推定手段と、を備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークの輪郭線を、精度良く抽出可能な画像処理装置及び画像処理方法並びに画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像取得部31と、元画像を2値化して元画像からワークの概略領域を特定する領域特定部32と、概略領域を膨張処理する領域膨張処理部34と、膨張処理された概略領域の境界線上に、複数の基準点を設定する基準点設定部35と、元画像から複数のエッジを抽出するエッジ抽出部33と、抽出された複数のエッジと基準点設定部35により設定された複数の基準点とを合成し、複数のエッジの中から複数の基準点のそれぞれに対して予め定められた位置にあるエッジを選択する輪郭エッジ選択部36と、選択された複数のエッジから連続したワークの輪郭線を抽出する輪郭線抽出部37と、を備えた画像処理装置。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラム
【課題】球面勾配ベクトルをより確実に算出可能な球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラムを提供する。
【解決手段】球面勾配算出方法は、複数の画素で離散的に表された離散球面に、撮影画像が投影された離散球面画像を形成する離散球面画像形成工程と、記離散球面画像を構成する複数の画素の各々の球面勾配ベクトルを、その球面勾配ベクトルを算出すべき画素の画素値と、その画素に隣接する画素の画素値と、その画素を構成する複数の辺の各々の長さ、その画素の面積と、その画素の中心からその画素を構成する複数の角部の各々への単位ベクトルとに基づいて算出する球面勾配算出工程と、を含む。
(もっと読む)
3次元データ映像の階段認識方法
【課題】3次元データ映像から階段の蹴上げ面及び踏み面を検出して、階段を認識する3次元データ映像の階段認識方法を提供する。
【解決手段】3次元データ映像の階段認識方法は、映像獲得部が、階段が位置する空間の3次元データ映像を獲得する段階と、映像処理部が、前記3次元データ映像から前記階段の連続する両踏み面の間の高さを計算し、前記計算された高さによって、前記連続する両踏み面の間に位置する各ポイントを判断し、前記連続する両踏み面の間に位置する各ポイントを通じて、前記連続する両踏み面の間に位置する蹴上げ面を検出する段階と、前記3次元データ映像から前記階段の連続する両蹴上げ面の間の幅を計算し、前記計算された幅によって、前記連続する両蹴上げ面の間に位置する各ポイントを判断し、前記連続する両蹴上げ面の間に位置する各ポイントを通じて、前記連続する両蹴上げ面の間に位置する踏み面を検出する段階とを含む。
(もっと読む)
1 - 20 / 2,174
[ Back to top ]