
Fターム[5L096FA72]の内容
イメージ分析 (61,341) | 特徴抽出 (17,550) | 特徴間の関係を構造化するもの (458) | セグメント間の関係 (372)
Fターム[5L096FA72]の下位に属するFターム
Fターム[5L096FA72]に分類される特許
1 - 20 / 58
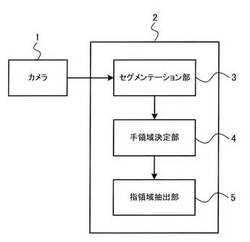
手領域検出装置、手領域検出方法、プログラム及び記憶媒体
【課題】手領域を精度良く検出することが可能な手領域検出装置、手領域検出方法及びプログラムを提供する。
【解決手段】手領域検出装置は、入力画像に対してセグメンテーションを行うことで、手領域の候補となる複数の領域を抽出するセグメンテーション手段と、セグメンテーション手段によって抽出された領域の輪郭線上に位置する一の輪郭点と、輪郭線上に位置する他の輪郭点との距離を、輪郭線を構成する全ての輪郭点について求め、求められた距離に基づいて、セグメンテーション手段によって抽出された複数の領域の中から手領域を決定する手領域決定手段と、を備える。
(もっと読む)
消失点推定方法、消失点推定装置及びコンピュータプログラム

【課題】消失点の推定精度を向上すること。
【解決手段】入力された画像に含まれる直線を検出し、直線の中から、略垂直の直線である垂直方向直線を検出し、画像に含まれる直線のうち垂直方向直線ではない直線である非垂直方向直線と、垂直方向直線との組合せのうち、その端点同士の距離が閾値よりも短い組合せを組合せ候補として検出し、組合せ候補の中から、垂直方向直線と非垂直方向直線とが類似している組合せ候補を消失線組合せとして選択し、選択された複数の消失線組合せにおける、複数の非垂直方向直線に基づいて消失点の位置を推定する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】文字認識処理によって文字画像ではない画像に対して文字画像であると認識された誤りを減少させるようにした画像処理装置を提供する。
【解決手段】画像処理装置の受付手段は、文字認識された文字候補画像と該文字候補画像に関する情報を受け付け、第1の判定手段は、前記受付手段によって受け付けられた文字候補画像に関する情報に基づいて、該文字候補画像が文字画像であるか否かを判定し、第2の判定手段は、前記第1の判定手段によって文字画像であると判定されなかった場合又は文字画像ではないと判定されなかった場合は、前記受付手段によって受け付けられた文字候補画像の特徴を抽出し、該文字候補画像が文字画像であるか否かを判定する。
(もっと読む)
3次元形状推定装置、3次元形状推定方法及び3次元形状推定プログラム
【課題】3次元形状の推定を行うことができる3次元形状推定装置を提供する。
【解決手段】空間の異なる位置から対象物体を撮影する多視点カメラによって撮像した画像から、対象物体の3次元形状を推定する3次元形状推定装置であって、多視点マルチカメラによって撮像した背景画像及び前景画像を入力する手段と、対象物体を含む3次元空間全体をボクセルに分割する手段と、ボクセルを背景画像及び前景画像に投影し、対象物体に含まれる第1の尤度を計算する手段と、ボクセルのそれぞれについて、隣接するボクセルとの間に対象物体の境界面が存在する第2の尤度を計算する手段と、第1の尤度及び第2の尤度を重み係数とする枝をボクセル毎に定義し、グラフを構築する手段と、構築されたグラフに対し、最小グラフカットを計算することにより対象となるボクセル集合を計算する手段と、ボクセル集合を対象物体の3次元形状情報として出力する手段とを備えた。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】複数の画素を含む領域に関する情報を考慮した領域分割を行うことにより、特定領域の検出精度を向上させることができる画像処理装置等を提供する。
【解決手段】画像内のエッジ情報に基づいて、画像を、各々が複数の画素を含む複数の小領域に分割する領域分割部110と、複数の小領域の各々が、検出対象である特定領域に帰属する確率である帰属確率を推定する帰属確率推定部120と、互いに隣接する小領域が、特定領域及び非特定領域の内、同じ領域に属する度合いを定量的に表す連結強度を算出する隣接間連結強度算出部130と、帰属確率及び連結強度に基づいて、上記画像から特定領域を検出する病変部検出部140とを備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】高精度かつ処理コストの低い被写体検出器を提供する。
【解決手段】入力画像に対して検出ウィンドウを走査する検出ウィンドウ走査手段と、検出ウィンドウ内の画像が、検出対象の被写体全体か否かを判定し、被写体候補を出力する被写体全体判定手段と、被写体候補同士に所定の重なりがある場合に重なりのある前記被写体候補の組みを出力する被写体候補重複判定手段と、予め検出ウィンドウ上に1つまたは複数の部分領域を設定し、各々の領域が被写体の一部であるか否かを判定する被写体部分判定手段と、被写体候補重複判定手段が出力する被写体候補の組みについて、被写体部分判定手段の結果に基づき被写体か否かを総合的に判定する被写体判定手段を有し、検出ウィンドウ走査手段は、入力画像に対する検出ウィンドウを相対的に複数のサイズで走査し、被写体候補の組みはそれぞれの組みにおいてサイズの異なる被写体候補を少なくとも1つ有する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】手の指の領域を判定すること。
【解決手段】画像処理装置100は、画像領域からエッジを抽出し、エッジに挟まれた領域の中心部分に相当する疑似スケルトンを複数抽出する。また、画像処理装置100は、隣り合う疑似スケルトンの間にエッジが存在しないもの同士を同一のグループに分類することで、疑似スケルトンをグループ分けする。画像処理装置100は、疑似スケルトンと該疑似スケルトン周辺のエッジとに囲まれる領域において、長辺方向の輝度勾配に対する短辺方向の輝度勾配の割合が所定の閾値以内となる場合に、該疑似スケルトンと同一のグループに分類される疑似スケルトンとエッジとに囲まれる領域を指の領域であると判定する。
(もっと読む)
画像処理装置及びプログラム
【課題】撮像手段により撮像された被写体の画像を含む撮像画像のうちで被写体の画像に対応する領域である被写体領域を検出する場合における、被写体領域の検出精度を向上させる。
【解決手段】撮像画像に基づいて、被写体領域の輪郭を構成する直線の候補を複数特定する直線候補特定部(24)と、特定された候補が被写体領域の輪郭を構成する直線となる確からしさを表す直線確度を、撮像画像に基づいて特定される、当該候補との間の距離が基準距離以内である位置の特徴量に基づいて算出する直線確度算出部(26)と、特定された複数の候補のうちから選出される4つの候補により囲まれる領域である領域候補が被写体領域である確からしさを表す領域確度を、該4つの候補の各々の直線確度に基づいて算出する領域確度算出部(30)と、算出された領域確度に基づいて被写体領域を検出する領域選択部(32)と、を含む画像処理装置である。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 印刷に現れる特徴に基づいて個々の物品を識別することが可能な個体識別装置、個体識別方法、及びプログラムを提供する。
【解決手段】 印刷は、印刷の条件(個々の印刷装置、インク、気温、湿度、その他の要因)によって異なる特徴が現れる。この特徴を画像処理によって顕現させ、個々の物品を識別する。即ち、基準とする物品に付与された印刷部を光学的に読み取った基準画像データに二値化処理等の画像処理を施して特徴点を抽出し、基準特徴点データとして記憶する。また、識別対象とする物品に付与された印刷部についても同様の手法で画像を読み取り、同様の画像処理を施して特徴点を抽出する。そして、抽出された対象物特徴点データと記憶されている基準特徴点データとを比較することにより、識別対象とする物品と基準物品とが同一個体であるか否かを判別する。
(もっと読む)
画像認識装置
【課題】対象物の認識での誤認識を低減すると同時に、認識処理のコストを抑制することができる画像認識装置を提供すること。
【解決手段】認識領域選択部12は、画像撮影部11により取得された画像における特徴的な領域を選択する。選択領域有効化部13は、特徴的な領域のみが認識対象とされるように有効化する。画像特徴量算出部14は、有効化された領域における画像特徴量を算出する。画像特徴量比較部16は、算出された画像特徴量と予め用意された参照画像の画像特徴量を比較する。結果出力部17は、算出された画像特徴量と最も近似するとされた画像特徴量を有する参照画像の識別子を認識結果として出力する。認識結果に関連付けられたメディアを表示させることもできる。
(もっと読む)
視線位置検出装置、視線位置検出方法、及びコンピュータプログラム
【課題】ユーザの視野画像に基づいて、ユーザが何を見ているのかを容易に且つ確実に自動で検出できるようにする。
【解決手段】視野カメラ画像のSIFT特徴点Siと、視認対象画像のSIFT特徴点Tjとを抽出し、抽出したSIFT特徴点Si、Tjの対応点を導出する。次に、対応点である「視野カメラ画像のSIFT特徴点Si」を頂点とするドロネー三角形を形成する。次に、ドロネー三角形の頂点の中から、作業者の視線位置の近傍の三点を視線位置近傍特徴点A、B、Cとして選択する。次に、「視線位置近傍特徴点A、B、C」から見た場合の「視野カメラ画像における作業者の視線位置の点P」の位置関係と同じになるように、「視線位置近傍特徴点A、B、C」に対応する「視認対象画像のSIFT特徴点A´、B´、C´」の画像上の座標から、「視認対象画像における作業者の視線位置の点P´」を求める。
(もっと読む)
人体姿勢推定装置、人体姿勢推定方法、およびコンピュータプログラム
【課題】手本となる人体の動きを映したリファレンス映像からその人体姿勢を高精度に推定する。
【解決手段】リファレンス映像に映る人体の動きにしたがって動く人物の動きをとらえてユーザモーションデータを生成するモーションデータ取得部30と、モーションデータ取得部30が生成したユーザモーションデータをGPDMによってモデル化するモデル学習部10と、モデル学習部10がモデル化した学習モデルに基づいて、リファレンス映像から人体姿勢を推定するモーション推定部20とを備えた。
(もっと読む)
弧検出装置、弧検出プログラム及び携帯端末装置
【課題】弧検出にかかる処理負荷を軽減しつつ、適切に弧を検出すること。
【解決手段】画像を入力する入力部と、画像から複数の線分を検出する線分検出部と、複数の線分のうち、2つの線分のそれぞれの位置及び基準に対する角度に基づき、2つの線分が関連付けられるかを判定する判定部と、判定部の判定結果に応じて関連付けられた2つの線分に基づき、前記複数の線分のうち、該2つの線分を含む線分で近似される弧を検出する弧検出部と、を備える。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】特徴点の検出精度を高めることを課題とする。
【解決手段】画像処理装置200の制御部240は、顔検出部241、抽出部242、作成部243、棄却部244および決定部245を有する。棄却部244は、作成部243により作成された複数の組合せの中から組合せを一つ取得する。続いて、棄却部244は、モデル記憶部232から辞書情報を取得し、辞書情報における特徴点間の距離と、作成された組合せにおける特徴点候補間の距離の誤差を算出する。そして、棄却部244は、辞書情報との誤差が最大となるリンクを特定し、誤差が最大となるリンクに関連する特徴点候補、言い換えればリンクに接続されている特徴点候補のうち、より誤差を発生させる特徴点候補を検出する。
(もっと読む)
進化的条件判断ネットワーク
【課題】条件判断木(決定木)を発展させた条件判断ネットワークを進化計算により最適化する方法に関する。
【解決手段】参照ブロック画像判定の経路が、ノード1、ノード3、ノード4、ノード6となった場合に、対象ブロック画像判定のノード4では、参照ブロック画像経路と重複するので、初期値である標準閾値に代えて作用閾値を用いて、対象ブロック画像の特徴量である中央値につき条件判断する。ノード5では、参照ブロック画像経路と重複しないので、初期値である標準閾値を用いて、対象ブロック画像の最頻値につき条件判断する。そして、終端で評価値を特定する。この条件判断ネットワークを進化計算アルゴリズムにより学習する。
(もっと読む)
画像クラスタリング、分類、および反復構造発見のためのグラフラティス法
【課題】文書認識システムおよび方法であって、画像が原始的特徴の集まりとして表され、これらの原始的特徴の空間的関係がグラフとして表されている。
【解決手段】画像の異なる部分を表しているすべての可能なサブグラフの有用な部分集合が、多くの画像のコーパスを介して示されている。データ構造はサブグラフのラティスであり、アルゴリズムは効率的かつ効果的にグラフラティスを作って使用するために提供される手段である。
(もっと読む)
情報処理装置および方法、並びにプログラム
【課題】簡単に有効な特徴量を抽出できるようにする。
【解決手段】 入力画像101から顔が検出され、顔領域111が設定される。顔領域111を基準として注目領域112が設定される。入力画像101から手が検出され、手領域121,122が設定される。顔領域111と手領域121,122を基準として、制限領域131乃至134が設定される。ユーザの姿勢の推定に、注目領域112のうちの、制限領域131乃至134を除く領域の特徴量が用いられる。
(もっと読む)
画像処理装置、制御方法、及びプログラム
【課題】カメラなどの撮影装置で文書を撮影した場合、傾きから文書に台形状の歪みが発生する。これを補正するために文書枠を検出する必要があるが、文書領域外に直線成分が多数ある場合などには、文書枠の推定が困難である。
【解決手段】直線成分の組み合わせから文書枠候補を推定する際に、直線の直交方向への色の勾配を加味することで、余分な文書枠候補を絞り込むことを可能とする。
(もっと読む)
移動体識別方法及び装置
【課題】移動体間の重なりが頻繁に生じても異なる移動体として識別可能にする。
【解決手段】移動体をメッシュのブロックに分割し、評価値に基づき、ブロック単位で追跡する。この評価値は、時刻tのブロックiの識別IDがIDjであると仮定したときの時刻(t−1)の対応するブロックmの動きベクトルVCm(t−1)と、時刻(t−1)のブロックmと隣接する、識別IDがIDjであるブロックの動きベクトルVBp(t−1)、p=1〜Nxとの差の絶対値の平方|VCm(t−1)−VBp(t−1)|2の平均値を含む。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
1 - 20 / 58
[ Back to top ]