
Fターム[5L096GA02]の内容
Fターム[5L096GA02]の下位に属するFターム
Fターム[5L096GA02]に分類される特許
1 - 20 / 245
道路形状推定装置及びプログラム
被写体検出装置、被写体検出方法及びプログラム
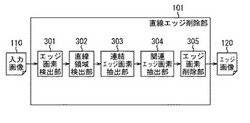
【課題】背景を含む画像から被写体の頭部領域を高精度に検出できるようにする。
【解決手段】検出したエッジ画素に基づいて、ハフ変換を用いて直線を表すパラメータρ、θを検出し、直線パラメータρ、θに基づいて、検出された複数のエッジ画素を含むように所定の幅wの直線領域を検出する。次に、全ての直線領域以外におけるエッジ画素の中から、直線領域と連結する連結エッジ画素を抽出し、注目する直線領域と連結する連結エッジ画素との交点の間の注目する直線領域内のエッジ画素を関連エッジ画素とする。そして、関連エッジ画素以外の直線領域上のエッジ画素を削除する。
(もっと読む)
対象物識別装置および対象物識別方法

【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークの輪郭線を、精度良く抽出可能な画像処理装置及び画像処理方法並びに画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像取得部31と、元画像を2値化して元画像からワークの概略領域を特定する領域特定部32と、概略領域を膨張処理する領域膨張処理部34と、膨張処理された概略領域の境界線上に、複数の基準点を設定する基準点設定部35と、元画像から複数のエッジを抽出するエッジ抽出部33と、抽出された複数のエッジと基準点設定部35により設定された複数の基準点とを合成し、複数のエッジの中から複数の基準点のそれぞれに対して予め定められた位置にあるエッジを選択する輪郭エッジ選択部36と、選択された複数のエッジから連続したワークの輪郭線を抽出する輪郭線抽出部37と、を備えた画像処理装置。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】処理負担を軽減する。
【解決手段】実施形態の画像処理装置は、特徴算出手段と、探索手段と、推定手段と、生成手段と、重畳手段と、を備える。特徴算出手段は、第1のフレーム画像情報について、所定の表示領域単位で、表示領域に含まれる特徴情報を算出する。探索手段は、第1のフレーム画像情報と、第1のフレーム画像情報より後の第2のフレーム画像情報と、の間の、画素の動きを探索する。推定手段は、探索された画素の動きと、第1のフレーム画像情報の表示領域単位の特徴情報と、に基づいて、第2のフレーム画像情報の表示領域単位の特徴情報を推定する。生成手段は、第2のフレーム画像情報の表示領域単位の特徴情報に従って高周波成分を異ならせた高周波画像情報を生成する。重畳手段は、第2のフレーム画像情報に高周波画像情報を重畳する。
(もっと読む)
マーク検出方法
【課題】 検出対象であるマークのエッジを正確に検出することが可能なマーク検出方法を提供する。
【解決手段】 Y方向に延びる直線状のマークを含む二次元画像を、X方向に微分した後、Y方向に射影加算する工程と、射影加算時におけるY方向に存在するエッジの数をX方向の領域毎に検出するエッジ数検出工程と、エッジ数検出工程で検出したX方向の領域毎のエッジの数が設定値以下のときに射影加算後のX方向の領域毎の加算値を減少させる加算値補正工程と、加算値補正工程により補正した射影加算後のX方向の領域毎の加算値に基づいて直線状のマークのエッジを検出するエッジ検出工程とを備える。
(もっと読む)
消失点推定方法、消失点推定装置及びコンピュータプログラム
【課題】消失点の推定精度を向上すること。
【解決手段】入力された画像に含まれる直線を検出し、直線の中から、略垂直の直線である垂直方向直線を検出し、画像に含まれる直線のうち垂直方向直線ではない直線である非垂直方向直線と、垂直方向直線との組合せのうち、その端点同士の距離が閾値よりも短い組合せを組合せ候補として検出し、組合せ候補の中から、垂直方向直線と非垂直方向直線とが類似している組合せ候補を消失線組合せとして選択し、選択された複数の消失線組合せにおける、複数の非垂直方向直線に基づいて消失点の位置を推定する。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
パターン測定方法
【課題】走査型電子顕微鏡で得られるパターンを撮像した画像から、フォトマスクのOPCパターンの寸法を精度良く且つ容易に測定することができるパターン測定方法を提供することを目的とする。
【解決手段】本発明のパターン測定方法は、フォトマスクのOPCパターンのうち、所望の範囲のパターンを包含する一回り大きい測定対象領域を設定し、測定対象領域のパターンの寸法を微小な領域毎に測定し、寸法の測定値を統計的に処理したものを曲線で近似し、近似曲線で表れるデータ群のうち、所望の範囲のパターン寸法に相当するデータ群の平均値を、所望の範囲のパターン寸法として推定する。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】検出対象エッジに対して類似形状の非検出対象エッジを持つような状況下で照明の変化が起こった場合でも、検出対象エッジのみを安定して検出することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】サンプリング領域毎の平均輝度値に基づいて特徴量を設定し、エッジ選択のための閾値を特徴量ヒストグラムから求め、求めた閾値と、予め記憶しておいた検出対象エッジ、非検出対象エッジの特徴量との相対関係に基づき、検出対象エッジのみを選択する。このように、検出対象ワークの入力画像に対し、毎回エッジ特徴量を計算して、検出対象エッジと非検出対象エッジを分離するための特徴量の閾値を動的に算出できるので、照明装置の劣化等が原因で入力画像内の輝度変動が大きくなった場合でも、安定して検出対象エッジと非検出対象エッジとを分離し、的確に検出することができる。
(もっと読む)
画像類似度算出装置、画像類似度算出方法、画像類似度算出プログラム及び記録媒体
【課題】反転関係にある画像同士が類似していると判断することができる画像類似度算出装置、画像類似度算出方法、画像類似度算出プログラム及び記録媒体を提供する。
【解決手段】画像類似度算出装置1は、入力画像30と参照画像31との類似度を算出する装置である。この装置は、局所特徴量抽出部12及び類似度算出部14を備える。局所特徴量抽出部12は、入力画像30及び参照画像31の特徴点を取得し、入力画像30及び参照画像31の特徴点ごとに回転及び反転に対して不変となる特徴量を記述する。類似度算出部14は、入力画像30及び参照画像31の特徴点ごとの特徴量に基づいて、入力画像30と参照画像31との類似度を算出する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】斜めから撮影された看板が写った画像から看板の画像領域を検出する。
【解決手段】画像中の画像領域の矩形度、該画像領域と該画像領域の周辺領域との色差、または該画像領域のエッジ比のうちいずれか1つまたは2つ以上の組に基づいて、画像から看板の画像を表す看板領域を選択する看板領域選択部23を備える。
(もっと読む)
ノイズレベル推定装置、ノイズレベル推定方法及びプログラム
【課題】ノイズを含んでいる一枚の画像から、当該画像のノイズレベルを簡単かつ正確に推定できるようにしたノイズレベル推定装置を提供する。
【解決手段】ノイズレベル推定装置は、画像から画像パッチ集合を生成する画像パッチ集合生成部と、画像パッチ集合生成部で生成された画像パッチ集合に基づき、画像のノイズレベルを推定するノイズレベル推定部とを備え、ノイズレベル推定部は、画像パッチ集合に基づき、画像パッチ集合に対応する分散共分散行列を算出する分散共分散行列算出部と、分散共分散行列算出部で算出された分散共分散行列の最小固有値を算出する最小固有値算出部と、最小固有値算出部で算出された最小固有値に基づき、ノイズレベルを算出するノイズレベル算出部とを備える。
(もっと読む)
車線認識装置
【課題】車線が認識できない場合でも、仮想車線を設定することができる車線認識装置を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段11と、前記画像における道路の領域の輝度を検出する輝度検出手段13と、前記輝度検出手段13で検出した輝度に基づき、前記画像における道路の車線を認識する車線認識手段13と、前記車線認識手段13で認識した車線の位置を記憶する記憶手段3と、前記車線認識手段13で前記車線が認識できないとき、前記記憶手段3に記憶された車線の位置に基づき、仮想車線を設定する仮想車線設定手段13と、を備えることを特徴とする車線認識装置1。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】良好に異物影を検出できる画像処理装置および画像処理プログラムを提供する。
【解決手段】本発明の画像処理装置50は、2色以上のカラーフィルタ13aを通して撮像素子13により撮影された処理対象画像が入力される画像入力部52と、処理対象画像中に移り込んだ影部の大きさを判定し、一定の範囲内のものを第一次異物影候補として抽出する第一次判定を行う第一次異物影判定部61,62と、第一次異物影判定部において第一異物影候補であると判定された影部について、2色以上のカラーフィルタのうちの1色を通した光の第1色画像における、影部内の外に対する強度の第1落込割合と、他の1色を通した光の第2色画像における、影部内の外に対する強度の第2落込割合と検出し、第1落込割合と第2落込割合と差が閾値以下の影部を、第一異物影候補から更に絞り込んで第二次異物影候補と判定する第二次判定を行う第二次異物影判定部67と、を備える。
(もっと読む)
画像解析プログラム、画像解析装置および撮像装置
【課題】画像上で前景と背景とを簡単に素早く区分する。
【解決手段】画像解析プログラムは、時系列的に撮像された複数の画像を入力する画像入力ステップと、複数の画像の中の第1の画像上で指定された前景または背景の位置を入力する位置入力ステップと、第1の画像上の前景以外の部分または背景の部分に、複数の画像上での背景の動きを検出するための目標領域を設定する領域設定ステップと、複数の画像の中の第2の画像上で目標領域の位置を探索する領域探索ステップと、第1の画像から第2の画像までの目標領域の位置の変化に基づいて背景の動きを検出する動き検出ステップと、動き検出ステップで検出した背景の動きに基づいて、複数の画像上で前景部分と背景部分とを区分する区分ステップとをコンピューターに実行させる。
(もっと読む)
1 - 20 / 245
[ Back to top ]