
Fターム[5L096GA08]の内容
Fターム[5L096GA08]に分類される特許
1 - 20 / 941
物体検出装置、監視カメラ、及び物体検出方法
画像監視装置
通過車両検知装置
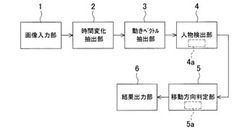
移動方向識別装置
【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
物体判別方法

【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
物体検出装置
【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
注目度推定装置およびそのプログラム
【課題】映像コンテンツを視聴する人物の当該コンテンツに対する注目度を計測する注目度推定装置を提供する。
【解決手段】注目度推定装置1は、モーションキャプチャで計測された人物の骨格位置から身体動作量を計測する身体動作量計測手段11と、カメラ映像から人物の瞬目間隔時間を計測する瞬目間隔計測手段13と、カメラ映像から視線変動量を計測する視線変動量計測手段14と、身体動作量、視線変動量および瞬目間隔時間のそれぞれについて、予め定めた映像区間における統計特徴量を生成する統計特徴量生成手段30と、統計特徴量と注目度との対応関係を学習データとして予め記憶した学習データ記憶手段40と、学習データに基づいて、統計特徴量生成手段30で生成された統計特徴量に対応する注目度を、当該映像区間に対する注目度として特定する注目度特定手段50と、を備えることを特徴とする。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
画像処理装置およびデジタルカメラ
【課題】背景に動きがある場合でも適切に前景候補を判断し得る画像処理装置を提供すること。
【解決手段】画像処理装置は、nフレーム目の画像と、(n−1)フレーム目の画像において背景を示す画像とをそれぞれ用いて該nフレーム目の画像において背景を示す画像を合成する画像合成手段20と、(n+1)フレーム目の画像と、画像合成手段20により合成された画像とをそれぞれ用いて該(n+1)フレーム目の画像において前景を示す画像を生成する画像生成手段20とを備える。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置
【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理方法
【課題】鮮鋭且つ自然な画像を生成することを課題とする。
【解決手段】画像処理装置は、特徴量算出部と、生成部と、加算部とを有する。特徴量算出部は、所定範囲内での画素値の変化を表す特徴量を入力画像から算出する。生成部は、学習用画像の特徴量に対する高周波成分を含む学習用画像の特徴量の相対的な値の分布を表す確率分布と、特徴量算出部によって算出された特徴量とに基づいて、画素値の変化のパターンを表す所定画像パターンの重みを求め、求めた重みで該所定画像パターンを重み付けることにより、入力画像に対する高周波成分を生成する。加算部は、入力画像に、生成部によって生成された高周波成分を加算する。
(もっと読む)
認識支援装置、認識支援方法、およびプログラム
【課題】物体認識させる画像を適切に撮影することができるようにすることで、短時間で適切な物体認識を可能とする認識支援装置、認識支援方法およびプログラムを提供する。
【解決手段】物体認識装置による物体認識を支援する認識支援装置であって、画像取得部が、異なる時刻に撮影された識別対象の物体を含む2つの画像を取得する。重要領域検出部は、前記2つの画像における前記物体認識装置による認識の確信度の差分と、前記2つの画像に含まれる特徴点における特徴を定量化した特徴量の差分とに基づき、重要領域を検出する。重要領域は、前記物体認識装置の認識精度を向上させる、前記認識対象の物体の一部を含む。また、重要領域検出部は、重要領域を前記2つの画像のいずれかから検出し、前記重要領域を表示部に通知することにより、上記課題の解決を図る。
(もっと読む)
勾配推定装置、勾配推定方法、及び勾配推定プログラム
【課題】路面が他の物体に覆われていても路面の勾配を算出することができる勾配推定装置、勾配推定方法、及び勾配推定プログラムを提供する。
【解決手段】特徴点抽出部は、撮影手段が撮影した画像上の特徴点を抽出し、物体検知部は、前記撮影手段が撮影した画像から物体を表す画像を検知し、勾配算出部は、物体検知部が検知した物体を表す画像における特徴点抽出部が抽出した特徴点の座標と、特徴点の座標の予め定められた時間における移動量と、に基づいて、物体が位置する路面の勾配を算出する。
(もっと読む)
オプティカルフロー検出装置及び検出方法
【課題】本発明は、マッチング探索処理中に無効フローを除去し、マッチング探索処理の処理時間の短縮を図ることを目的としている。
【解決手段】このため、オプティカルフロー検出装置において、マッチングスコア算出手段とマッチングスコア差分算出手段とマッチングスコア差分判定手段とフロー内積算出手段とフロー内積評価手段とを備え、マッチング探索時、差分がしきい値以下の時に、フロー内積算出手段により内積値を算出し、フロー内積評価手段により無効フロ一を除去する。また、オプティカルフロー検出方法において、現在画像の画像データと過去画像の画像データから前回と今回のマッチングスコアの差分を算出し、マッチング探索時、差分がしきい値以下の場合に、前回までのオプティカルフローと今回のオプティカルフローで内積値を算出し、内積値でオプティカルフローの方向性を判定して無効フローを除去する。
(もっと読む)
画像比較装置および画像比較プログラム
【課題】画像比較検査を容易且つ正確に実施することのできる画像比較装置および画像比較プログラムを提供する。
【解決手段】画像比較装置10は、基準となる画像と検査対象となる画像とを略同一の解像度で読み取ることにより、第1の画像データと第2の画像データとを生成する画像読取手段11,16と、第1の画像データおよび第2の画像データを画面上であおり表示する画像表示手段11,12と、第1の画像データと第2の画像データとを比較することで両画像データ間での差異を検出し、差異が所定の閾値を超えた場合に当該差異の存在する領域に相違点があると判断してあおり表示されている画像データ上にマーキング表示を行う相違点抽出手段11と、を備えており、画像データ上に表示されるマーキングが、ポインティングデバイス15の操作によって追加・削除自在に構成されている。
(もっと読む)
画像検査装置、画像検査方法、及びプログラム
【課題】多種多様な定型帳票を対象に、帳票種識別を精度良く行う。
【解決手段】基準画像を入力する基準画像入力手段と、被検査画像を入力する被検査画像入力手段と、基準画像と被検査画像とを整合する画像整合手段と、整合された画像に対して座標変換処理を施すことにより複数のパラメータを算出する算出手段と、複数のパラメータの各値と、複数のパラメータのそれぞれに対応して予め定められた複数の基準値とをそれぞれ比較する比較手段と、比較手段の比較結果に基づいて、被検査画像の受け入れの可否を判断する判断手段と、を含む。
(もっと読む)
情報処理装置、情報処理方法、情報処理装置用プログラム、および、記録媒体
【課題】対象物の追跡が正確にできる情報処理装置等を提供する。
【解決手段】動画の予め選択された1のフレームの画像における対象物2上に少なくとも1つのパーティクルpを設定し(S3)、予め選択された1のフレーム20以降、動画における時間的に前のフレームと時間的に後のフレームとを順次取得し(S4)、取得される前のフレームの画像と後のフレームの画像との背景差分画像30を算出し(S5)、算出された背景差分画像に応じて、パーティクルの追跡範囲の外縁3aを決定し、前のフレームの画像におけるパーティクルの位置を基準とする所定範囲内かつ追跡範囲の外縁内であって、基準としたパーティクルの位置の画素の色情報と類似の色情報を有する画素の位置に、後のフレームの画像におけるパーティクルを設定し(S6)、設定されたパーティクルの位置から、後のフレームの画像における対象物の位置を特定する(S9)。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
1 - 20 / 941
[ Back to top ]