
Fターム[5L096HA01]の内容
Fターム[5L096HA01]の下位に属するFターム
動画像解析 (3,285)
Fターム[5L096HA01]に分類される特許
1 - 20 / 183
マーカの検出および追跡装置
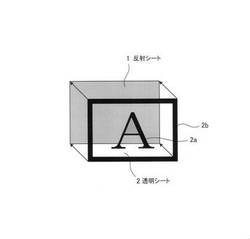
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
類似画像領域検出方法、装置及びプログラム

【課題】検出対象とする画像領域を事前に指定することなく任意の画像領域を検出できるようにし、しかも当該任意の検出領域が画面内で移動した場合でも検出可能とする。
【解決手段】制御ユニット1の制御の下で、表示タイミングの異なる2枚の画像データを重ね合わせた状態で、その一方の画像データの位置座標を二次元方向(X軸、Y軸の各方向)に一定量シフトするごとに、当該画像データ間で画素ごとにそのRGB値の一致度数を計算してその全画素の合計を求め、この一致度数合計が最大値を示すときの画像データのシフト位置座標から一致画像領域を検出するようにしたものである。
(もっと読む)
オブジェクト検出装置
【課題】複数個のオブジェクトを高速に検出することが可能なオブジェクト検出装置を提供する。
【解決手段】分割部2は、複数個の検出対象オブジェクトについての全検出処理をM個に均等に分割する。設定部3は、連続して入力されるM個のフレーム画像のうちの各々のフレーム画像での検出処理を、分割されたM個の検出処理のうちの1つに設定する。検出部6は、各フレーム画像において、設定された検出処理を実行する。選択部5は、M個のフレーム画像のうちのいずれかで、いずれかのオブジェクトを検出した場合に、複数個の検出対象オブジェクトの中から検出されたオブジェクトと同一および関連する1以上のオブジェクトを選択する。分割部2、設定部3、検出部6は、選択されたオブジェクトについて再分割、再設定、再検出を行なう。
(もっと読む)
興味推定支援装置、方法及びプログラム
【課題】ユーザの興味推定の候補となる画面を漏れなく抽出できるようにし、これによりユーザの興味を高精度に推定可能とする。
【解決手段】画面キャプチャ処理部11により表示デバイス32の表示画面を一定の時間間隔でキャプチャしてその画面イメージデータを表示履歴記憶部21に順次蓄積する。そして、変化なし領域抽出部12により、上記蓄積された時刻の異なる2つの画面イメージデータ間の差分を求め、この差分をもとに変化なし領域を抽出してその画像データを領域画像データ記憶部22に記憶する。そして、この記憶された変化なし領域の画像データの内容を画像認識部14により認識し、この認識結果を解析データとして解析データ記憶部24に保存すると共にサービス提供事業者等へ送信する。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
画像差分検出装置及び画像差分検出プログラム
【課題】差分画像を検出する画像間に位置ずれが発生しても意図した差分画像を検出できる画像差分検出装置及び画像差分検出プログラムを提供することを課題とする。
【解決手段】撮影手段により撮影された画像間の差分を検出する画像差分検出装置10であって、異なるタイミングで撮影された第1及び第2の画像の何れか一方をシフトしながら第1及び第2の画像間の差分画像を検出する画像差分演算手段32と、第1及び第2の画像間の差分画像のうち、第1及び第2の画像間の差が最も少ない差分画像を出力する画像差分評価手段33と、第1及び第2の画像間の差が最も少ない差分画像と第1又は第2の画像とを合成した合成画像を出力する画像合成手段34とを有することにより上記課題を解決する。
(もっと読む)
画像処理システムおよび画像処理方法
【課題】ユーザが望むフレームの画像データを高精度に検出することができ、効率よく動画の観測、評価を行うことが可能な画像処理システムを提供する。
【解決手段】連続した複数フレームの画像データを記憶する画像データ記憶部203と、記憶された画像データを表示する表示部207と、表示された画像データにおいて注目領域を設定する注目領域設定部210と、設定された注目領域について、画像データ記憶部203に記憶された隣接するフレームの画像データを比較して、その変化量を検出する変化量検出部204と、検出された変化量が所定の閾値を超えたことを判定する変化判定部205と、変化判定部205によって所定の閾値を超えたと判定されたフレームの画像データをインデックスとして記憶するインデックス記憶部206とを備える画像処理システムを採用する。
(もっと読む)
画像処理装置と画像処理方法およびプログラム
【課題】二画像間で同一オブジェクトの対応付けを行うために用いる特徴量を精度よく低処理コストで生成できるようにする。
【解決手段】特徴点検出処理部は、画像から特徴点を検出する。特徴量生成処理部は、検出した特徴点の位置を基準とした局所領域内における二画素の画素差分値を閾値と比較して、比較結果を示す二値化情報を特徴点に対応する特徴量の一成分として生成する。二画像間で特徴量が類似する特徴点の検出を行い、検出された特徴点の対応関係から同一オブジェクトの対応付けを行う。比較結果を示す二値化情報を特徴量の一成分として用いることで、二画像間で同一オブジェクトの対応付けを行うために用いる特徴量を精度よく低処理コストで生成できる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】立体撮影によって得られた画像に対してマルチフレーム合成を行う際に、良好な立体画像を得ることができる画像処理装置、画像処理方法及び画像処理プログラムを提供する。
【解決手段】各々異なる複数の視点毎に非同期の状態で連続的に複数回撮影することで得られる前記視点毎の複数の画像を取得する取得手段(S101)と、複数の視点から代表視点を決定する第1決定手段と、代表視点の複数の画像から基準画像を決定する第2決定手段(S103)と、代表視点以外の視点の複数の画像において、代表視点の基準画像と最も類似度の高い画像を代表視点以外の視点毎に基準画像として選択する選択手段(S107)と、視点毎に、各々選択された基準画像をベースに複数の画像の合成処理を行う合成手段(S109、S111)と、を備えた。
(もっと読む)
物体検出方法、物体検出装置および物体検出プログラム
【課題】昼夜の時間帯や天候などの環境変動に如何に関わらず、道路上の落下物を高精度で検出することが可能な物体検出装置を提供する。
【解決手段】検出波長が互いに異なる第1,第2カメラにより撮影した画像をそれぞれの取得画像として取得する第1,第2画像取得手段1,5と、各前記取得画像から道路上の物体の存在を判定する第1,第2物体存在判定手段2,6と、各前記取得画像から道路上の物体の移動状態を検出し、静止物体と移動物体とを判別する第1,第2移動体検出手段3,7と、各前記取得画像から道路上の物体の立体情報を算出する第1,第2立体情報算出手段4,8と、第1,第2物体存在判定手段2,6、第1,第2移動体検出手段3,7、第1,第2立体情報算出手段4,8それぞれにおける処理結果を統合する特徴量統合手段9と、特徴量統合手段9における処理結果の特徴量により落下物の判定を行う落下物判定手段10と、を少なくとも備える。
(もっと読む)
ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム
【課題】各カメラによる画像に写っている像全体の位置をステレオ画像として適切となるように修正するための較正パラメータを算出するステレオ画像較正方法を提供する。
【解決手段】ステレオ画像較正方法は、第1及び第2のカメラから被写体を含む領域を撮影した第1及び第2の画像を取得し、第1及び第2の画像からそれぞれ被写体領域を検出し、各画像の被写体領域から被写体上の同一の点に対応する被写体特徴点の組を抽出し、被写体特徴点の組に基づいて、像面に対して平行な第1の軸及び第2の軸のそれぞれの周りの第1のカメラの回転角と第2のカメラの回転角の差による各画像上の被写体の位置のずれを補正する第1の較正パラメータを求め、第1の画像及び第2の画像の背景領域に写っている物体の像から各カメラの光軸周りの回転角の差による第1の画像と第2の画像間の回転を補正する第2の較正パラメータを求めることを含む。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】軽い負荷で画像をトラッキングすることができるようにする。
【解決手段】トラッキングの対象であるオブジェクトを含む対象画像と、所定のフレームの対象画像と比較される比較領域の画像である比較画像との、第1の特徴量のマッチング度と第2の特徴量のマッチング度を所定の混合率で混合して得られる信頼度の、混合率を変化させた場合の和で表される評価値が計算され、評価値が最大になるときの混合率が求められる。評価値が最大になるときの混合率が設定された信頼度に基づいて対象画像に対応する画像が検出される。
(もっと読む)
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
(もっと読む)
車両用白線認識装置
【課題】演算時間を軽減しつつ、精度よく白線近似線を求めることができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、実空間上での白線の概略形状を近似する仮白線近似線の各係数を同定するに際し、前フレームで認識した白線近似線に基づいて低次側係数を同定し、同定されていない複数の高次側係数の組合せを、実空間上に投影された白線候補点Pd毎に当該白線候補点Pdの座標と低次側係数とを用いて複数パターン演算し、最も多く演算された高次側係数の組合せを仮白線近似線Ltの高次側係数として同定する。そして、仮白線近似線Ltを基準とする候補点選定領域Asを設定するとともに、当該候補点選定領域As内に存在する白線候補点Pdを最終的な白線候補点Pとして選定し、選定した白線候補点Pに基づいて白線近似線Lを演算する。
(もっと読む)
画像判定装置、画像判定プログラム、カメラ及び記録媒体
【課題】画像がボケているか否かを良好に判定することのできる画像判定装置を提供する。
【解決手段】本発明の画像判定装置10は、元画像に鮮鋭化処理を施し、鮮鋭化画像を取得する鮮鋭化処理部14と、前記鮮鋭化画像のコントラスト評価値を求めるコントラスト評価値算出部16と、前記元画像のコントラスト評価値と前記鮮鋭化画像のコントラスト評価値との比較値を求めるコントラスト比較部18と、前記比較値より、前記元画像がボケているかどうか判定するボケ判定部20とを備えること、を特徴とする。
(もっと読む)
物体識別システムおよび方法、並びに、特徴点位置抽出システムおよび方法
【課題】物体にタグを装着することなく、複数視点からのカメラ画像を対象にしつつカメラの視点方向に依存しない物体識別を行う。
【解決手段】物体識別システム1は、複数視点から物体(照合用物体、対象物体)を撮影した画像データから物体の複数の特徴点を抽出する特徴点抽出部22と、複数の特徴点から幾何学的不変量が算出可能な特徴点を選択する特徴点選択部23と、選択された特徴点の位置から幾何学的不変量を算出する幾何学的不変量算出部24と、照合用物体についての幾何学的不変量と対象物体についての幾何学的不変量とを照合することで対象物体を識別する識別部26と、を備える。
(もっと読む)
ジェスチャ入力装置
【課題】ユーザの身体にジェスチャ認識用の撮像装置を装着する場合においても、ユーザの意図しない指示が出力されることを低減することが可能なジェスチャ入力装置を提供することを目的とする。
【解決手段】ユーザの身体に装着される撮像装置7と、撮像装置7により撮像されるユーザの手指の撮像画像に基づいて、ユーザの手指のジェスチャを認識する画像認識装置2と、画像認識装置2により認識されるジェスチャに対応する指示を出力するコマンド認識装置3と、ユーザの身体の動きに伴う撮像装置7の姿勢の変動量を求める姿勢測定装置4及び撮像装置姿勢認識装置5と、その変動量に基づいて、コマンド認識装置3からコマンドが出力されることを許可する認識制御装置6とを備えてジェスチャ入力装置1を構成する。
(もっと読む)
置去り/持去り物体検知装置及び置去り/持去り物体検知方法
【課題】置去り/持去り事象を精度良く判別することができる置去り/持去り物体検知装置及び置去り/持去り物体検知方法を提供する。
【解決手段】背景データ生成部12は、過去の情報の量が異なる2つの背景画像データを生成するとともに、過去の情報の量が異なる2つの背景距離データを生成し、置去り/持去り領域検出部13は、過去の情報の量が異なる2つの背景画像データを比較することにより、一定時間以上変化の継続した領域を検出し、置去り/持去り事象判定部14は、置去り/持去り領域検出部13で検出された領域に対して、過去の情報の量が異なる2つの背景距離データの比較を行い、置去り事象であるか、持去り事象であるかの判定を行う。このように、過去の情報量の異なる2種類の背景画像データ、背景距離データを生成することで精度の良い置去り/持去り検出が可能となる。
(もっと読む)
侵入監視装置及び侵入監視方法
【課題】カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害検知が可能な侵入監視装置を提供する。
【解決手段】動物体検知部22の検知結果を基に小領域ごとに単位時間当たりの検知数を測定して人通りの多少を推定する動物体存在領域推定部23と、基準画像生成部21で生成された基準画像を基に明るさ変動に頑健な特徴点が多く存在する領域を選定する特徴量有効領域選定部24とを備え、撮像部1への妨害検知判定領域を動的に選定するようにした。これにより、カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害を検知することができる。
(もっと読む)
領域分割装置及び領域分割方法
【課題】動画像の領域分割を適切に行うこと。
【解決手段】領域分割装置は、動画像の隣接フレーム間の画素ごとの対応を推定する対応点推定手段11と、原画像から複数の解像度の画像を生成し、ノイズを付加し、類似の画素を結合し、当該画像を合成して境界候補画像を生成する境界候補画像生成手段12と、対応点の確からしさを表す信頼度関数を対応点に関するコスト関数を用いて求め、信頼度関数により算出する画素の信頼度に応じて領域分割する領域分割手段13と、境界候補画像と領域分割処理結果との差分に応じて信頼度関数を補正する対応点情報補正手段15と、前回の領域分割と、信頼度関数が補正された今回の領域分割との一致度に基づいて領域分割の適否を判定し、領域分割が適当でなければ対応点情報補正手段15と領域分割手段13による処理を繰り返し実行させ、領域分割が適当であれば領域分割処理を終了させる繰り返し条件規定手段14と、を備える。
(もっと読む)
1 - 20 / 183
[ Back to top ]