
Fターム[5L096HA03]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816)
Fターム[5L096HA03]の下位に属するFターム
移動ベクトル (1,211)
Fターム[5L096HA03]に分類される特許
1 - 20 / 605
姿勢検出装置および姿勢検出方法
対象物識別装置および対象物識別方法
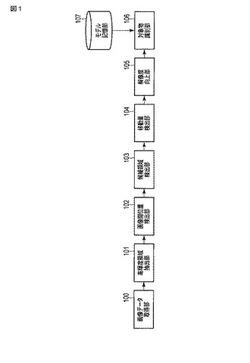
【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
対象物変化検出装置および対象物変化検出方法

【課題】車両周辺の対象物の変化を迅速かつ正確に検出できる対象物変化検出装置および対象物変化検出方法を提供することを課題とする。
【解決手段】本発明は、画像から対象物の属性を検出し、検出した対象物の属性内の当該対象物の種類を示す種類情報を取得し、取得した種類情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定し、検出した対象物を含む画像から、設定した変化検出用閾値を用いて、対象物の変化を検出する。ここで、本発明は、検出した対象物の属性内の当該対象物の状態を示す状態情報を取得し、取得した種類情報および取得した状態情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定する。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
情報処理装置、及び、情報処理方法
【課題】効率的に動領域抽出処理を行う動領域抽出プロセッサを提供する。
【解決手段】 動領域抽出プロセッサ5は、領域毎のアフィン動きモデルを推定する動きモデル推定処理と、領域を表すラベルを画素に割り当てる領域ラベリング処理との間の連携を強化し、境界更新処理と新領域検出処理の択一化により画素単位のパイプライン処理を実現し、要素処理(輝度勾配の算出など)の共通化と簡単化を行うことによって、比較例と比較して、アーキテクチャの50%削減、及び、4.2倍のスループットを実現している。
(もっと読む)
顔画像認証装置
【課題】表情、顔の向きの変動等により本人認証をしにくい状況でも本人受理を確保することができる顔画像認証装置を提供する。
【解決手段】認証候補人物特定手段326は、類似度算出手段325によって算出された類似度に基づいて前記複数の登録人物から認証候補人物を特定する。検出率算出手段327は、顔追跡手段322によって追跡された直近の複数の顔領域画像に対する類似度が最高となったフレームの割合である登録人物検出率を、認証候補人物について計算する。認証閾値決定手段328は、顔領域画像に含まれる顔が認証候補人物として特定された登録人物の顔であるか否かを認証するための基準である認証閾値を、登録人物検出率に応じて決定する。認証判定手段329は、類似度が認証閾値を超えた認証候補人物を監視領域内の人物の顔であると判定する。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置
【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
画像処理装置およびデジタルカメラ
【課題】背景に動きがある場合でも適切に前景候補を判断し得る画像処理装置を提供すること。
【解決手段】画像処理装置は、nフレーム目の画像と、(n−1)フレーム目の画像において背景を示す画像とをそれぞれ用いて該nフレーム目の画像において背景を示す画像を合成する画像合成手段20と、(n+1)フレーム目の画像と、画像合成手段20により合成された画像とをそれぞれ用いて該(n+1)フレーム目の画像において前景を示す画像を生成する画像生成手段20とを備える。
(もっと読む)
画像投影装置
【構成】プロジェクタ46は、スクリーンの前方からスクリーンに再生画像を投影する。撮像装置16は、スクリーンが外れるように設定された視野を有し、この視野で捉えられたシーンを表す画像を繰り返し出力する。CPU36は、人差し指を伸ばした左手の左右方向への動きを撮像装置16から出力された画像に基づいて探索し、プロジェクタ46によって投影すべき再生画像をこのような動きの探知に応答して更新する。
【効果】操作性の向上とディジタルカメラの小型化が図られる。
(もっと読む)
映像に基づく車両用警報システム
【課題】
任意の車両に搭載可能な警報システムにおいて、移動物体を効率的に検出する。
【解決手段】
本システムは、車両の周囲を連続的に撮影する少なくとも一つのカメラを有している。これにより、移動物体を監視する。また、カメラ画像におけるピクセルモーションに基づいて、任意の移動物体の運動を計算するようプログラムされたコンピュータユニットを備える。さらに、危険な移動物体が検出されたときに警報信号を発するための警報ユニットを備える。この判断を行うために、少なくとも一つの移動物体についての前記計算した運動と、予め定められた運動パターンとの関連性の調査又は比較を行う。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を監視画像上にて追跡する装置において、注目物体が密集する他物体に接近する場合に取り違えを防止する処理を適切に行うことが容易ではない。
【解決手段】仮説設定部51は複数の物体について現時刻における候補位置を過去位置から複数予測する。尤度算出部52は、注目物体の各移動先候補について、画像特徴に基づき当該物体の移動先らしさの度合いを表す評価値を求める。また、当該移動先候補での他物体の存在蓋然性を表す存在度に応じて、評価値を低める補正を行う。その一方で、注目物体の移動先候補の一部について前記補正を弱める評価値補償を行い、他物体の譲歩を前記評価値に反映させる。この補正及びその限定的な補償を行った評価値から当該注目物体の移動先位置を判定する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
迷子発見システム及び方法
【課題】多人数が来訪する場所等において、保護者などからの申告に依存することなく、迷子の発生を早期に検出し、その迷子に対応できるようにする。
【解決手段】各保護者について顔特徴情報を保持する保護者情報と、各子供についてその顔特徴情報と迷子度と保護者情報へのリンクとを有する子供情報と、を保持する保護者推定データベースを用いる。入場口での撮像データ内に写っている人物に関し、推定年齢に基づき子供とその保護者とに分類し、子供とその保護者とを対応付けて、保護者推定データベースに登録する。子供を含んでいる新たな撮像データに関し、保護者推定データベース内の子供情報を検索してその子供に対応する保護者の顔特徴情報を取得して撮像データとのマッチングを行うことにより、子供が保護者と一緒に写っているか否かを判別して子供の迷子度をアップまたはダウンし、迷子度がしきい値に達していればアラームを発生する。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
画像処理装置、方法、プログラム、および監視システム
【課題】監視対象者の一定時間の行動状態を把握する。
【解決手段】短背景生成部123が、滞在者が動くとき、滞在者の当該動いた部分がフレーム間で撮像画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの撮像画像から短背景画像を生成し、背景生成部124が、滞在者がフレーム間で短背景画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの短背景画像から背景画像を生成し、変化検出部125が、短背景画像と撮像画像の差分から変化抽出画像を生成する。そして、継続検出部126が、短背景画像と背景画像の差分から継続抽出画像を生成し、滞在者検出部122が、変化抽出画像と、継続抽出画像から監視対象者である滞在者の状態を示す情報を算出する。
(もっと読む)
動き検出装置
【課題】測定対象物の移動方向が変化した場合であっても、これを即時に検出して測定対象物の移動速度を求めることが可能な動き検出装置を提供する。
【解決手段】特徴領域に対応する画素の投票値のうち、中央の画素にピークが存在する場合には、測定対象物の移動方向が反転したものと判断する。そして、移動方向が反転した場合には、各特徴領域に対応する画素の投票値のうち、方向変化前の影響による投票値と方向変化後の影響による投票値に分類する。そして、方向変化後の影響による投票値に基づき、これを補正して測定対象物の速度を算出する。従って、測定対象物の移動方向が変化した場合には、これを即時に認識し、測定対象物の移動速度検出に反映させることが可能となる。
(もっと読む)
指示光検出装置及び方法
【課題】撮像部によって指示光の位置を検出する構成において、環境光の影響を軽減して指示光の検出精度の向上を実現する。
【解決手段】遠隔指示器から射出される指示光(赤外光)が検出されていない期間(50が肯定)に、指示光の検出範囲内を定期的に撮像することで得られた背景画像をフレームメモリに上書き記憶しておき(52〜60)、指示光(赤外光)が検出されると指示光の検出範囲を撮像し(64)、背景画像との差分画像を生成し(66)、差分画像から高輝度領域を抽出し(68)、指示光領域の探索、位置の演算、出力を行う(76〜80)。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
1 - 20 / 605
[ Back to top ]