
Fターム[5L096HA05]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 追尾 (769)
Fターム[5L096HA05]に分類される特許
1 - 20 / 769
オブジェクト抽出装置、オブジェクト抽出方法、及びプログラム
画像監視装置
物体検出装置、物体検出装置の制御方法、およびプログラム
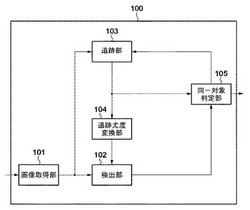
【課題】対象物体の姿勢変動やオクルージョンに対してロバストな検出を可能にする。
【解決手段】フレーム画像を順次取得する画像取得部と、フレーム画像から検出尤度を算出して、当該検出尤度に基づいてフレーム画像から対象物体を検出する検出部と、複数のフレーム画像のそれぞれから対象物体の追跡尤度を算出して、当該追跡尤度に基づいて複数のフレーム画像間で対象物体を追跡する追跡部と、を備える物体検出装置であって、検出部は、画像取得部により取得されたフレーム画像から追跡部により算出される対象物体の追跡尤度と、当該フレーム画像から検出部により算出される対象物体の検出尤度とに基づいて、当該フレーム画像から対象物体を検出する。
(もっと読む)
物体検出装置

【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
移動方向識別装置
【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
姿勢推定装置、姿勢推定方法及びプログラム
【課題】高速かつ高精度に初期姿勢を推定すること。
【解決手段】姿勢推定装置は、第1対象物と第1対象物に近接する第2対象物とを撮影する撮影手段と、第1対象物の構成要素と、第2対象物の構成要素と、第1及び第2対象物の構成要素間で接触している確率と、が複数組、対応付けられた接触情報を予め記憶する記憶手段と、撮影された第1及び第2対象物を含む撮影画像と、記憶手段により記憶された接触情報と、に基づいて、確率の高い順で、第1対象物の構成要素と、第2対象物の構成要素との接触を検出する接触検出手段と、接触検出手段により検出された第1及び第2対象物の位置と、複数のリンクを相互に接続して第1対象物を表現した簡易モデルと、に基づいて、第1対象物の初期姿勢を算出し、算出した初期姿勢と、簡易モデルを第1対象物の形状により近似した詳細モデルと、に基づいて、最終的な第1対象物の初期姿勢を推定する推定手段と、を備える。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】不確実で非同期な入力情報に基づく情報解析により、ユーザ位置や識別情報、発話者情報などを生成する構成を実現する。
【解決手段】画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力し、入力イベント情報に基づいて、各ユーザの位置およびユーザ識別情報を含むターゲット情報と、イベント発生源の確率値を示すシグナル情報を生成する情報統合処理部を有し、情報統合処理部は、発話源確率算出部を有し、発話源確率算出部は、各ターゲットの発話源確率を示す指標値としての発話源スコアを、イベント検出部から入力する複数の異なる情報に対して発話状況に応じた重みを乗算して算出する処理を行う。
(もっと読む)
注目度推定装置およびそのプログラム
【課題】映像コンテンツを視聴する人物の当該コンテンツに対する注目度を計測する注目度推定装置を提供する。
【解決手段】注目度推定装置1は、モーションキャプチャで計測された人物の骨格位置から身体動作量を計測する身体動作量計測手段11と、カメラ映像から人物の瞬目間隔時間を計測する瞬目間隔計測手段13と、カメラ映像から視線変動量を計測する視線変動量計測手段14と、身体動作量、視線変動量および瞬目間隔時間のそれぞれについて、予め定めた映像区間における統計特徴量を生成する統計特徴量生成手段30と、統計特徴量と注目度との対応関係を学習データとして予め記憶した学習データ記憶手段40と、学習データに基づいて、統計特徴量生成手段30で生成された統計特徴量に対応する注目度を、当該映像区間に対する注目度として特定する注目度特定手段50と、を備えることを特徴とする。
(もっと読む)
顔画像認証装置
【課題】表情、顔の向きの変動等により本人認証をしにくい状況でも本人受理を確保することができる顔画像認証装置を提供する。
【解決手段】認証候補人物特定手段326は、類似度算出手段325によって算出された類似度に基づいて前記複数の登録人物から認証候補人物を特定する。検出率算出手段327は、顔追跡手段322によって追跡された直近の複数の顔領域画像に対する類似度が最高となったフレームの割合である登録人物検出率を、認証候補人物について計算する。認証閾値決定手段328は、顔領域画像に含まれる顔が認証候補人物として特定された登録人物の顔であるか否かを認証するための基準である認証閾値を、登録人物検出率に応じて決定する。認証判定手段329は、類似度が認証閾値を超えた認証候補人物を監視領域内の人物の顔であると判定する。
(もっと読む)
自車移動推定方法および自車移動推定プログラム
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を監視画像上にて追跡する装置において、注目物体が密集する他物体に接近する場合に取り違えを防止する処理を適切に行うことが容易ではない。
【解決手段】仮説設定部51は複数の物体について現時刻における候補位置を過去位置から複数予測する。尤度算出部52は、注目物体の各移動先候補について、画像特徴に基づき当該物体の移動先らしさの度合いを表す評価値を求める。また、当該移動先候補での他物体の存在蓋然性を表す存在度に応じて、評価値を低める補正を行う。その一方で、注目物体の移動先候補の一部について前記補正を弱める評価値補償を行い、他物体の譲歩を前記評価値に反映させる。この補正及びその限定的な補償を行った評価値から当該注目物体の移動先位置を判定する。
(もっと読む)
情報処理装置、情報処理方法、情報処理装置用プログラム、および、記録媒体
【課題】対象物の追跡が正確にできる情報処理装置等を提供する。
【解決手段】動画の予め選択された1のフレームの画像における対象物2上に少なくとも1つのパーティクルpを設定し(S3)、予め選択された1のフレーム20以降、動画における時間的に前のフレームと時間的に後のフレームとを順次取得し(S4)、取得される前のフレームの画像と後のフレームの画像との背景差分画像30を算出し(S5)、算出された背景差分画像に応じて、パーティクルの追跡範囲の外縁3aを決定し、前のフレームの画像におけるパーティクルの位置を基準とする所定範囲内かつ追跡範囲の外縁内であって、基準としたパーティクルの位置の画素の色情報と類似の色情報を有する画素の位置に、後のフレームの画像におけるパーティクルを設定し(S6)、設定されたパーティクルの位置から、後のフレームの画像における対象物の位置を特定する(S9)。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
画像編集装置およびプログラム
【課題】移動する物体を撮影した一連の高速連写画像/動画から適切に画像を抽出して、移動物体の解析に効果的な学習教材を生成することが可能な画像編集装置を提供する。
【解決手段】移動物体を高速連写撮影(撮影間隔T)した各画像P1〜P15の合成画像CGが生成され、該合成画像CG上での各移動物体KB1〜KB15の位置(xy座標)が検出されると共に、これに基づき同移動物体KB1〜KB15の移動の軌跡が検出される。すると移動物体KB1〜KB15の移動の軌跡の特徴点Qmaxに対応するところの画像P8が特定され、この特定画像P8を含めて前記高速連写の撮影間隔Tよりも長いユーザ設定された撮影間隔Δtに対応するところの各画像P2,5,8,11,14が前記高速連写の各画像P1〜P15の中から抽出され連写抽出画像ファイルとして前記設定撮影間隔Δtと対応付けて画像&座標範囲ファイル記憶部に教材データとして記憶される。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
1 - 20 / 769
[ Back to top ]