
Fターム[5L096HA08]の内容
イメージ分析 (61,341) | 認識 (5,606) | 辞書パターンと対比するもの (1,918) | 所定のパターンを見付けるもの (655)
Fターム[5L096HA08]に分類される特許
1 - 20 / 655
物体検出装置、物体検出装置の制御方法、およびプログラム
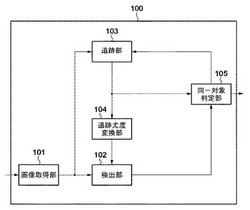
【課題】対象物体の姿勢変動やオクルージョンに対してロバストな検出を可能にする。
【解決手段】フレーム画像を順次取得する画像取得部と、フレーム画像から検出尤度を算出して、当該検出尤度に基づいてフレーム画像から対象物体を検出する検出部と、複数のフレーム画像のそれぞれから対象物体の追跡尤度を算出して、当該追跡尤度に基づいて複数のフレーム画像間で対象物体を追跡する追跡部と、を備える物体検出装置であって、検出部は、画像取得部により取得されたフレーム画像から追跡部により算出される対象物体の追跡尤度と、当該フレーム画像から検出部により算出される対象物体の検出尤度とに基づいて、当該フレーム画像から対象物体を検出する。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法

【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
手領域検出装置、手領域検出方法、プログラム及び記憶媒体
【課題】手領域を精度良く検出することが可能な手領域検出装置、手領域検出方法及びプログラムを提供する。
【解決手段】手領域検出装置は、入力画像に対してセグメンテーションを行うことで、手領域の候補となる複数の領域を抽出するセグメンテーション手段と、セグメンテーション手段によって抽出された領域の輪郭線上に位置する一の輪郭点と、輪郭線上に位置する他の輪郭点との距離を、輪郭線を構成する全ての輪郭点について求め、求められた距離に基づいて、セグメンテーション手段によって抽出された複数の領域の中から手領域を決定する手領域決定手段と、を備える。
(もっと読む)
物体検出装置
【課題】 撮像された映像における物体の検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 画像入力部1が出力する映像を基に時間軸上で連続する画像で構成される画像フレーム群を生成し、個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、生成した個々の画像フレーム群において、算出した状態変化量の連続する画像間の差分を移動領域として算出し、算出された移動領域の重心を連続する画像フレーム群の間で比較してその移動量を特徴量として算出する動きベクトル抽出部3と、算出した個々の領域の特徴量を用いて映像内の物体の存在をアダブーストによるカスケード型の識別器により判断する検出部3とを備えて撮像映像における物体の存在を判断する。
(もっと読む)
検出装置、及び、検出方法
【課題】検出対象物の検出処理速度を向上させること。
【解決手段】センサーの出力に対応する階調値を含む検出対象画像を生成する画像生成部と、前記検出対象画像から検出対象物を検出することに用いる学習済みの識別器を基準ウィンドウ毎に有する検出器と、を備え、前記画像生成部は、各基準ウィンドウの複数の倍率のサイズで前記検出対象画像を生成し、前記識別器は、前記基準ウィンドウにおいて分割された各領域に対応するサブ識別器を含み、前記検出器は、前記検出対象画像の倍率に応じた領域の前記サブ識別器に、前記検出対象画像における領域の階調値を入力し、前記サブ識別器の出力に基づいて前記検出対象画像における検出対象物の検出を行う、検出装置。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークの輪郭線を、精度良く抽出可能な画像処理装置及び画像処理方法並びに画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像取得部31と、元画像を2値化して元画像からワークの概略領域を特定する領域特定部32と、概略領域を膨張処理する領域膨張処理部34と、膨張処理された概略領域の境界線上に、複数の基準点を設定する基準点設定部35と、元画像から複数のエッジを抽出するエッジ抽出部33と、抽出された複数のエッジと基準点設定部35により設定された複数の基準点とを合成し、複数のエッジの中から複数の基準点のそれぞれに対して予め定められた位置にあるエッジを選択する輪郭エッジ選択部36と、選択された複数のエッジから連続したワークの輪郭線を抽出する輪郭線抽出部37と、を備えた画像処理装置。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
画像処理装置、方法、及び画像表示装置
【課題】対象物の三次元位置を高精度で算出する。
【解決手段】実施形態の画像処理装置は、実施形態の画像処理装置は、第1取得部、第2取得部、第1設定部、第2設定部、第1算出部、及び第2算出部を備える。第1取得部は、対象物が複数の位置から撮像された複数の撮像画像を取得する。第2取得部は、前記対象物の仮三次元位置と、前記対象物の仮サイズを取得する。第1設定部は、実空間における前記仮三次元位置の近傍に少なくとも1つの探索候補点を設定する。第2設定部は、前記探索候補点を前記撮像画像に射影した射影位置毎に、前記対象物を探索するための探索窓であって、前記探索候補点の位置と前記仮サイズとに基づくサイズの前記探索窓を設定する。第1算出部は、前記探索窓内において、前記対象物が含まれるかどうかを示す評価値を算出する。第2算出部は、前記評価値に基づいて前記対象物の三次元位置を算出する。
(もっと読む)
注目度推定装置およびそのプログラム
【課題】映像コンテンツを視聴する人物の当該コンテンツに対する注目度を計測する注目度推定装置を提供する。
【解決手段】注目度推定装置1は、モーションキャプチャで計測された人物の骨格位置から身体動作量を計測する身体動作量計測手段11と、カメラ映像から人物の瞬目間隔時間を計測する瞬目間隔計測手段13と、カメラ映像から視線変動量を計測する視線変動量計測手段14と、身体動作量、視線変動量および瞬目間隔時間のそれぞれについて、予め定めた映像区間における統計特徴量を生成する統計特徴量生成手段30と、統計特徴量と注目度との対応関係を学習データとして予め記憶した学習データ記憶手段40と、学習データに基づいて、統計特徴量生成手段30で生成された統計特徴量に対応する注目度を、当該映像区間に対する注目度として特定する注目度特定手段50と、を備えることを特徴とする。
(もっと読む)
車線判別装置
【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
映像検出装置および映像検出方法並びに映像検出プログラム
【課題】所望の事象の進展を表す映像に類似した映像を高い精度で検出する映像検出装置および映像検出方法並びに映像検出プログラムを提供する。
【解決手段】所望の事象の進展を表す基準映像を保持する保持部と、前記基準映像に基づいて、当該基準映像における前記事象の進展の速度を含む複数の速度で前記事象の進展を表す複数の調整映像を生成する生成部と、蓄積装置に蓄積された各蓄積映像と、前記複数の調整映像のそれぞれとの類似度を評価する評価部と、前記評価部で得られた評価結果に基づいて、前記複数の調整映像のいずれかに類似する前記蓄積映像を、前記基準映像に類似する映像として取り出す検出部とを有する。
(もっと読む)
映像に基づく車両用警報システム
【課題】
任意の車両に搭載可能な警報システムにおいて、移動物体を効率的に検出する。
【解決手段】
本システムは、車両の周囲を連続的に撮影する少なくとも一つのカメラを有している。これにより、移動物体を監視する。また、カメラ画像におけるピクセルモーションに基づいて、任意の移動物体の運動を計算するようプログラムされたコンピュータユニットを備える。さらに、危険な移動物体が検出されたときに警報信号を発するための警報ユニットを備える。この判断を行うために、少なくとも一つの移動物体についての前記計算した運動と、予め定められた運動パターンとの関連性の調査又は比較を行う。
(もっと読む)
フラットパネル表示基板製造装置、および、フラットパネル表示基板製造装置の画像処理方法
【課題】フラットパネル表示基板製造でアライメントマークを検索するときに、アライメントマークのマスク領域を自動生成し、高精度にアライメントマークを検索できるようにする。
【解決手段】表示パネルとTABの各々に位置合わせをおこなうためのアライメントマークにより、アライメントマークを認識するときに、撮像画像よりアライメントマーク教示画像を切り出し、そのアライメントマークを認識して、アライメントマークのエッジ点を抽出する。そして、エッジ点に囲まれたエッジ範囲を算出し、アライメントマーク教示画像のエッジ範囲に含まれない領域を、マスク領域として算出し、算出されたマスク領域により、アライメントマーク教示マスク画像を生成し、アライメントマーク教示マスク画像によりマスクしたアライメントマークを認識する。
(もっと読む)
画像認識システムおよび画像認識方法
【課題】ネットワーク型画像認識システムのレスポンスを向上させる。
【解決手段】端末装置が取得した画像をサーバにおいて認識する画像認識システムであって、端末装置は、入力画像から加工画像を生成する画像処理部と、画像処理部によって生成される加工画像を前記サーバへ送信する通信部と、を有する。サーバは、端末装置から受信する加工画像に対して認識処理を行う認識部と、認識部による認識処理において不足している情報を判断する不足情報判断部と、端末装置に対して不足情報判断部による判断結果に対応する画像を要求する要求部と、を有する。画像処理部は、サーバからの要求に基づいて、入力画像から加工画像を生成する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】 処理対象の画像データに光沢部分が有るか否かの判定を、従来の判定手段が有する精度よりも高精度に行う。
【解決手段】 識別部13は、処理対象画像から光沢部分の特徴量として、“輝度と色”又は“輝度変化方向”を抽出し、抽出した当該特徴量を基に各々異なる識別手段を有する複数の弱識別器によって光沢部分を識別し、得られる各識別結果にパラメータを掛けて評価値を得、得られる評価値を総合して、所定の光沢部分であるか否かを判定する。検出処理部15は、判定結果により例えば白黒で光沢画像を検出する。学習処理部14は、正解が分かっている所定の光沢部分の訓練用画像を識別部13に用いることにより、学習処理を行い、学習結果として、光沢部分であるか否かの判定を適正化する上記パラメータの値を求める。また、処理対象の印刷用画像データに対しては、学習処理を経て適正化されたパラメータを設定して光沢部分の判定を行う。
(もっと読む)
外界認識方法,装置,および車両システム
【課題】物体までの距離によらず好適に,車両等の物体検出を行う。
【解決手段】自車周辺を撮影した画像を解析する外界認識装置100は,近傍を表す画像の第一領域,および遠方を表す画像の第二領域を設定する処理領域設定部101と,設定された第一領域において第一の識別器103により物体検出を行う第一の物体検出部104と,設定された第二領域において第二の識別器106により背景パターンをも考慮して物体検出を行う第二の物体検出部104と,検出された物体矩形を補正する矩形補正部107と,検出された物体矩形に基づき衝突までの予測時間を算出する衝突予測時間算出部108を備える。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 タガントが付与された物品を識別する際に、タガントの影による分布位置の誤認識を防ぎ、精度よく特徴点抽出を行うことが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、基材とは異なる光学反射特性を有するタガントをランダムに配置しておく。また個々の物品の撮影画像からタガントの影を除去した後、タガントの分布位置情報を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品についても同様に、撮影画像から影除去処理後、タガントの分布位置情報(対象物特徴点データ)を抽出する。そして、抽出した対象物特徴点データと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像評価装置、撮像装置およびプログラム
【課題】 簡易な操作で画像の評価にユーザの嗜好を反映させる。
【解決手段】 画像評価装置の画像評価部は、各々の候補画像から特徴量を抽出するとともに、特徴量を変数とする評価式を用いて複数の候補画像のうちから代表画像を選出する。表示処理部は、代表画像および複数の候補画像を表示装置に表示させる。入力部は、候補画像のうちから最適画像の指定を受け付ける。学習処理部は、代表画像の選出後に最適画像の指定があったときに、最適画像が代表画像として選出されるように評価式を調整する。
(もっと読む)
オブジェクト検出装置
【課題】複数個のオブジェクトを高速に検出することが可能なオブジェクト検出装置を提供する。
【解決手段】分割部2は、複数個の検出対象オブジェクトについての全検出処理をM個に均等に分割する。設定部3は、連続して入力されるM個のフレーム画像のうちの各々のフレーム画像での検出処理を、分割されたM個の検出処理のうちの1つに設定する。検出部6は、各フレーム画像において、設定された検出処理を実行する。選択部5は、M個のフレーム画像のうちのいずれかで、いずれかのオブジェクトを検出した場合に、複数個の検出対象オブジェクトの中から検出されたオブジェクトと同一および関連する1以上のオブジェクトを選択する。分割部2、設定部3、検出部6は、選択されたオブジェクトについて再分割、再設定、再検出を行なう。
(もっと読む)
1 - 20 / 655
[ Back to top ]