
Fターム[5L096JA11]の内容
Fターム[5L096JA11]に分類される特許
1 - 20 / 2,127
画像特徴量抽出装置およびそのプログラム
画像識別情報付与プログラム及び画像識別情報付与装置
オブジェクト抽出装置、オブジェクト抽出方法、及びプログラム
開閉眼検出装置
位置姿勢計測装置、その処理方法及びプログラム
画像処理装置、画像処理方法
情報処理方法、情報処理装置、および記憶媒体
画像処理装置、及びプログラム
物体の検出方法及びその方法を用いた物体の検出装置
画像処理方法、画像処理装置、撮像装置およびプログラム
情報処理装置、情報処理方法、及びプログラム
画像監視装置
画像処理装置、画像処理方法
学習装置、学習方法およびプログラム
横断歩道検出装置
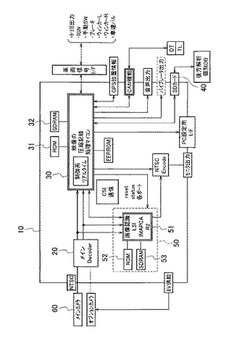
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
移動方向識別装置

【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
対象物変化検出装置および対象物変化検出方法
【課題】車両周辺の対象物の変化を迅速かつ正確に検出できる対象物変化検出装置および対象物変化検出方法を提供することを課題とする。
【解決手段】本発明は、画像から対象物の属性を検出し、検出した対象物の属性内の当該対象物の種類を示す種類情報を取得し、取得した種類情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定し、検出した対象物を含む画像から、設定した変化検出用閾値を用いて、対象物の変化を検出する。ここで、本発明は、検出した対象物の属性内の当該対象物の状態を示す状態情報を取得し、取得した種類情報および取得した状態情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定する。
(もっと読む)
デジタルコンテンツのメタデータを生成するための方法および装置
【課題】メタデータの生成が行われている最中に、すでに生成されたメタデータをレビューできるようにする、デジタルコンテンツのメタデータを生成する。
【解決手段】メタデータ生成は、複数の処理タスクに分割されて(30)、その処理タスクは、2以上の処理ノードに割り振られる(31)。2以上の処理ノードによって生成されたメタデータは、収集されて(36)、そして出力ユニット上で可視化される(36)。
(もっと読む)
画像認識装置及び方法
【課題】複数の対象を含む画像における各々の対象が何であるかを高精度で認識し、且つ各対象の存在する場所をも認識する画像認識装置を提供する。
【解決手段】部分領域抽出部11において、入力画像から矩形の候補領域を複数抽出し、各々を対象画像として、画像認識部12にて何であるかを認識させ、候補リストを得る。当該候補リストに挙げられた各々の対象について再度、再判定認識部13において対象画像が表す対象であるかを認識させて、最終的な認識結果となすよう、画像認識装置1を構成する。対象の位置は、部分領域抽出部11において抽出した矩形の位置として得られる。部分領域抽出部11で採用する画像特徴量よりも、再判定識別部で採用する画像特徴量を高精度にすることで、ある程度候補リストを絞り込んだ上で、少ない計算負荷によって高精度な認識結果が得られる。
(もっと読む)
1 - 20 / 2,127
[ Back to top ]