
Fターム[5L096JA20]の内容
Fターム[5L096JA20]に分類される特許
1 - 20 / 25
類似度評価装置及び方法並びに類似度評価プログラム及びその記憶媒体
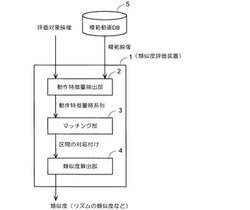
【課題】模範映像と評価対象映像とで対応する局所時間における個別動作ごとの類似度を自動で評価する。
【解決手段】所与の模範映像の動作を時系列上の所与の箇所で区切った模範個別動作の各々に対応する、評価対象映像の動作を時系列上で区切った評価対象個別動作の各々を求め、両個別動作ごとの類似度を評価する類似度評価装置1を、各々の映像から動作特徴量時系列を抽出する動作特徴量抽出部2と、動作特徴量時系列の両者における時系列上の変動に基づいて要素同士の対応関係を決定し、該対応関係を用いることで所与の箇所に対応して区切られる評価対象動作の各々の区間を求めて、時系列順に模範個別動作の各区間と評価対象動作の各区間を対応づけるマッチング部3と、マッチング部にて対応付けられた区間同士の比較によって前記類似度を求める類似度算出部4とを備えて提供する。
(もっと読む)
一時停止線検出装置及びプログラム

【課題】一時停止線以外の白線の誤検出を防止して、一時停止線を精度良く検出する。
【解決手段】画素距離変換部20で、画像入力部18により取得した入力画像を2値化し、画素値を画素距離に変換した画素距離画像を生成する。交差パターン検出部22で、画素距離画像を用いてレーンマークを追跡して、レーンマークと水平方向に伸びる白線との交点を検出する。探索領域設定部24で、交点近傍領域を一時停止線を検出するための探索領域に設定し、一時停止線判定部26で、探索領域内の白線の芯線を抽出し、抽出された芯線が直線状かつ所定の長さ以上の場合に、芯線に対応する白線を一時停止線と判定する。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
画像パターンマッチング装置、画像パターンマッチング方法および画像パターンマッチング用プログラム
【課題】動画に限定されることなく、異なる任意の画像中における対象物画像(画像パターン)の対応を、ピクセル間の単調連続性を確保しつつ画素毎に求めること。
【解決手段】 画像処理手段2は、一の画像の画素位置と他の画像の画素位置との画素間距離の累積値が最小となる最小累積距離を、4次元空間座標において累積的に画素間距離を積み上げ計算することにより算出する。画像処理手段2は、積み上げ計算を行う場合に、対角方向を基準としてm座標の値とn座標の値との和の値が小さくなる順番で計算を実行し、最小累積距離の算出処理を行う場合に、累積計算における直前の座標位置からの遷移状態を制限した上で、直前の座標位置における累積座標間距離に基づいて対応する画素に関する累積座標間距離の算出を行う。
(もっと読む)
部分画像対応付け装置、部分画像対応付け方法及び部分画像対応付けプログラム
【課題】部分画像を確実に対応付ける部分画像対応付け装置、部分画像対応付け方法及び部分画像対応付けプログラムを提供することを課題とする。
【解決手段】基準画像及び対応画像から複数の部分画像をそれぞれ選択し、画素の輝度値を用いて各部分画像の特徴量をそれぞれ解析し、解析された部分画像に対する特徴量を用いて基準画像の各部分画像と対応画像の各部分画像との類似度を順次計算する。
(もっと読む)
画像処理装置、画像処理プログラムおよび画像処理方法
【課題】背景画像に対して移動する物体に対しても背景画像と同時に画質を向上させることのできるフレーム積分処理を実現可能な画像処理装置を提供する。
【解決手段】画像処理装置は、背景画像の背景移動量MBと、目標物体Oの目標移動量MOとをそれぞれ求める。そして、連続する画像フレーム101、102の一方の画像に対して背景移動量MB+目標領域に対してのみ目標移動量MO分だけずらした後、フレーム積分処理をおこなう。すなわち、背景画像のずれとともに、目標物体のずれが補正された連続した画像フレーム101、102に対してフレーム積分される。したがって、背景画像および目標物体Oの双方のS/N比の改善効果が得られる。
(もっと読む)
信号処理装置及びその方法
【課題】互いに大きく変形し、信号値の絶対値や変動範囲が変化し、ノイズが付加された2つの信号間の対応付けを、頑健、かつ、高精度で行うことの可能な信号処理装置を提供する。
【解決手段】信号処理装置1は、信号入力部2、ボケ変換部3、最適経路計算部4、探索範囲設定部5、照合窓設定部6、終了判定部7から構成され、両信号をボケ変換し、ボケの大きさを小さくしながら複数回のDPマッチングを行い、DPマッチングの各回の処理においては、前回DPマッチングで得られた最適経路の近傍に探索範囲を設定し、前回DPマッチングで得られた最適経路に基づいて照合窓の形状、標本点数、拡大率等のパラメータを信号上の各点毎に設定する。
(もっと読む)
指紋画像の回転角度算出装置、指紋画像回転装置、指紋照合装置、指紋画像の回転角度算出プログラム、指紋画像回転プログラム及び指紋照合プログラム
【課題】指紋センサのばらつきや指紋画質に影響され難い指紋画像の傾き角度を算出する指紋画像の回転角度算出装置及び指紋画像の回転角度算出プログラムを提供する。
【解決手段】入力指紋画像100から塗りつぶし画像200を作成する。塗りつぶし画像200における指紋領域202を近似した直線である領域近似直線221に基づいて回転角度θを算出する(説明図220)。回転角度θを補正した方がよい場合には補正する。そこで、塗りつぶし画像200において指紋領域202と背景領域201との境界線401,402を抽出する(境界線画像400)。境界線401,402の一部を近似した直線である境界線近似直線411,412を求める(説明用境界線画像410)。2本の近似直線の信頼性が判定され、信頼性のある近似直線がある場合には、信頼性のある近似直線を用いて角度を算出し(説明用境界線画像420)、回転角度θをこの角度に補正する。
(もっと読む)
指紋画像の回転角度算出装置、指紋画像回転装置、指紋照合装置、指紋画像の回転角度算出プログラム、指紋画像回転プログラム及び指紋照合プログラム
【課題】指紋領域の輪郭が欠けている場合でも、指紋画像の基準位置からの傾きの角度を正しく算出する指紋画像の回転角度算出装置を提供する。
【解決手段】入力指紋画像100から塗りつぶし画像200を作成する。塗りつぶし画像200において、指紋領域202と背景領域201との境界線401,402抽出される(境界線画像400)。境界線401,402の一部を近似した直線である境界線近似直線411,412が求められる(説明用境界線画像410)。境界線近似直線411,412に基づいて回転角度θが算出される(説明用境界線画像420)。2本の近似直線の信頼性が判定され、信頼されない近似直線は使用されずに、信頼された近似直線に基づいて回転角度θが算出される。2本とも信頼されない場合、塗りつぶし画像200における指紋領域202を近似した直線である領域近似直線221に基づいて回転角度θが算出される(説明図220)。
(もっと読む)
細胞輪郭抽出装置、細胞輪郭抽出方法およびプログラム
【課題】 細胞の染色画像から細胞の輪郭を抽出できる細胞輪郭抽出装置を提供する。
【解決手段】 細胞輪郭抽出装置10は、顕微鏡によって撮影された細胞の染色画像を取得する画像取得部12と、染色画像から細胞核の領域を検出する細胞核輪郭抽出部20と、染色画像の各画素について隣接画素との濃度勾配およびエッジを検出するエッジ検出部32と、細胞核の周りを一周する最適経路を、濃度勾配をパラメータとする動的計画法によって求め、最適経路を細胞の輪郭として抽出する細胞輪郭抽出部30とを備え、細胞輪郭抽出部は、細胞核の領域内にある所定点から異なる方向に向かって並ぶ2つの画素配列にそれぞれ含まれる画素群をつなぐ部分最適経路を計算する処理を、画素配列の方向が所定点の周りで一周するまで画素配列の方向を変えて繰り返し行い、部分最適経路に基づいて最適経路を求める。
(もっと読む)
姿勢検知装置および挙動検知装置
【課題】この発明は、被観察者の姿勢を高精度で検知することができる姿勢検知装置を提供することを目的とする。
【解決手段】姿勢検知装置において、被観察者の撮影画像に基づいて、3次元人物領域情報を抽出する人物領域情報抽出手段、3次元人物領域情報から3次元人物領域の高さ、幅および奥行き情報を算出する算出手段、ならびに3次元人物領域の高さに対する幅の比および3次元人物領域の高さに対する奥行きの比に基づいて、被観察者の姿勢を判定する判定手段を備えている。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】 対象物の姿勢推定を高精度に行うことができる画像処理装置及び画像処理プログラムを提供する。
【解決手段】 物体の姿勢を推定する場合、物体の撮像画像から物体の輪郭の特徴量を抽出し、その輪郭の特徴量をデータベースとして記憶されている複数の特徴量データと照合して、各特徴量データに対する輪郭の特徴量の類似度を算出する。続いて、各特徴量データに対する輪郭の特徴量の類似度を、緯度・経度の2次元類似度マップとして表示する。続いて、各類似度を経度方向に対して累積した経度ヒストグラムと、各類似度を緯度方向に対して類似度を累積した緯度ヒストグラムとを作成する。続いて、各ヒストグラムについて閾値よりも大きい類似度総和ピークを抽出し、候補領域を選定する。そして、候補領域内に存在する視点に対応する特徴量データに対する輪郭の特徴量の類似度を最大類似度とする。
(もっと読む)
物体との相互作用を含む複合動作の分類
【課題】単純な動作に対応した記憶データを使用して、単純な動作の組み合わせを含む、観察した複合動作を特定、分類する方法を提供する。
【解決手段】観察した動作を含む画像データを受信し、その画像データを使用して水平移動値、垂直移動値、スケール値、肌検出値の組み合わせなどの、観察した動作に対応する特徴ベクトルを生成する。次に、記憶された基準データによって表される、単純な動作の組み合わせを表すベースライン基準ベクトルが複数生成される。次に、生成された特徴ベクトルは、単純な動作の組み合わせを表すベースライン基準ベクトルに近づくように、修正される。そして、修正された特徴ベクトルを、ベースライン基準ベクトルの1つ1つと比較することで、観察した複合動作を最も的確に表すベースライン基準ベクトルと、対応する単純な動作の組み合わせを決定する。 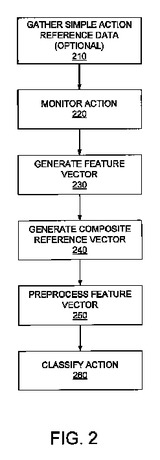 (もっと読む)
(もっと読む)
顔モデル作成システム
【課題】顔形状の特徴点からなるモデルを自動生成する。
【解決手段】正準化処理部112は、レンジファインダ100が取得したモデル化対象の顔(対象顔)の距離画像を、姿勢及び位置を正しく合わせる。2次元DPマッチング部114は、この距離画像と、標準顔パッチモデル距離画像122との画素同士の対応関係を、2次元DPマッチングにより求める。この対応関係に基づき、モデル変形部116が、標準顔パッチモデル126の各特徴点を対象顔の形状に合わせて移動させることで、標準顔パッチモデル126を変形して対象顔のパッチモデルを生成する。
(もっと読む)
フォーム識別方法
【課題】任意の入力画像に含まれる表のフォームを精度良く識別可能なフォーム識別方法を提供する。
【解決手段】本発明のフォーム識別方法においては、まず、入力装置から得られた入力画像から、その外郭部分に対する各罫線の長さおよび位置の相対値を示す第1の情報を抽出する。また、上記入力画像から、それに含まれる罫線間の長さおよび位置の相対値を示す第2の情報を抽出する。そして、上記の抽出された第1、第2の情報と、予め記憶装置に格納されたモデルとなる各表のフォームにおける上記第1、第2の情報にそれぞれ相当する各情報とを照合して、上記入力画像と上記モデルとなる各表のフォームとの類似度を計算する。最後に、上記モデルとなる各表のフォームのうち、上記類似度の計算によって得られた最も高い類似度のものを、上記入力画像に対応する最適フォームとして出力装置から出力する。
(もっと読む)
画像マッチング装置、画像マッチング方法および画像マッチング用プログラム
【課題】 動的計画法を用いた画像マッチング装置において、照明変化に頑健で輪郭部での対応精度の良い、かつ物体領域内部などの輝度値が平滑領域においても正しい対応を得ることが可能な画像マッチングを行う。
【解決手段】 ステレオ画像の走査線対をそれぞれ座標軸にとる探索平面上の各点について、正規化相関係数を算出すると同時に輝度値差分による類似度も算出する。対応経路として接続すべき点を探索する際に、まず正規化相関係数を参照し、正規化相関係数が所定の閾値(TH1)を上回る場合は正規化相関係数を類似度評価値として用いる。正規化相関係数が所定の閾値(TH1)を下回る場合には、輝度値差分を参照し、輝度値差分が所定の閾値(TH2)を上回る場合は、輝度値差分を正規化相関係数の代替として用いる。輝度値差分が所定の閾値(TH2)を下回る場合は、非対応領域として、当該点を探索対象から除外する。
(もっと読む)
画像処理用部品データ作成方法及び画像処理用部品データ作成装置
【課題】 部品の種類に応じた適切な部品データを自動的に作成できるようにする。
【解決手段】 画像処理用部品データの作成対象となる部品の画像データを取り込み、この部品の画像データから当該部品の特徴を表す部分のデータ(以下「特徴データ」という)を抽出する。この特徴データには、水平方向と垂直方向のピクセル頻度とゼロクロスパターン頻度のデータが含まれる。この後、抽出した特徴データをリファレンス用部品データのデータベースの特徴データと比較して両者が最も一致する部品の種類を自動判別する。判別した部品の種類に応じて当該部品の画像データから当該部品の画像処理用部品データ(ボディ、リード、バンプ等の位置やサイズ等のデータ)を抽出する。この後、抽出した部品の画像処理用部品データを画像処理用部品データのデータベースに当該部品の種類と関連付けて保存する。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】 移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、移動体の通過数のみならず、その種類をも精度良く識別する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する1本のラインに係るライン型フレーム画像56について変化を生じている間取得し、これら各ライン型フレーム画像56を移動体の移動方向と逆の方向へ時刻順に結合して抽出サンプル画像60を生成する一方、移動体の種類ごとに、抽出サンプル画像60に対応するように予め決定された登録パターン画像62を記憶装置8に格納し、生成された抽出サンプル画像60と、記憶装置8に格納された登録パターン画像62とを、DPマッチングにより比較し、抽出サンプル画像60がいずれの種類の登録パターン画像62と一致するかを判別して、一致した登録パターン画像62の種類に係るものとして移動体を識別する。
(もっと読む)
信号処理装置及び方法、並びにプログラム
【課題】 DPマッチングにおける経路構築を効率よく高速に行うことが可能な信号処理装置及びその方法、並びにプログラムを提供する。
【解決手段】 評価値計算部10は、各対応点における評価値を計算し、経路選択部11は、各対応点における経路を選択する。選択された経路は、経路列生成部12に順次格納され、経路列毎に纏められる。経路列生成部12は、経路列を経路列記憶部14に格納し、経路構築部16は、格納された経路列に基づいて、2系列の要素の対応関係を表す経路を探索する。ここで、経路列記憶部14では、各経路列の位置に応じて当該経路列が格納されるアドレスが決定されていると共に、各経路列上での位置に応じて当該経路列に含まれる各経路のインデクスが決定されており、経路構築部16は、各対応点における経路に基づいて、次に読み出すべき経路が格納されたアドレス及びインデクスを特定する。
(もっと読む)
画像処理装置及び方法、並びにプログラム
【課題】 DPマッチングでの対応付けが困難な場合であっても、左右の画像から高品質の仮想視点画像を作成する。
【解決手段】 指定通過点探索部20は、DPマッチングでの対応付けが困難な特徴点、例えば眼鏡フレームの両端部分を検出し、その座標を指定通過点とする。DPマッチング部21のうち、コスト計算部22は、左画像のスキャンライン上の画素を縦軸、右画像のスキャンライン上の画素を横軸として、各対応点についてマッチングコストを計算する。パス探索部23は、右上の対応点からパス探索を始め、隣接する対応点のうち原則としてマッチングコストが最小の対応点を辿り、且つ、指定通過点を通過させながら、左下の対応点へと至るパスを探索する。仮想視点画像作成部104は、DPマッチング部21から供給された対応点情報に基づいて、左右の画像から仮想視点画像を作成する。
(もっと読む)
1 - 20 / 25
[ Back to top ]