
Fターム[5L096JA28]の内容
Fターム[5L096JA28]に分類される特許
1 - 20 / 50
顔方向の検出方法および情報処理機器
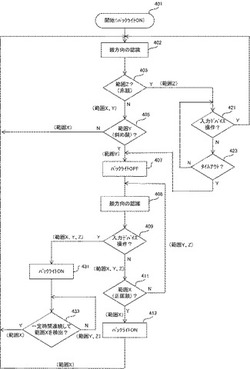
【課題】顔の方向を検出してディスプレイを備えるコンピュータの電力を制御する。
【解決手段】カメラ・モジュールが撮像した画像データからディスプレイの正面方向に対する顔の方向を判断する(403)。斜め顔を検出したときは、ディスプレイのバックライトをオフにする(407)。入力デバイスからの入力がある間は、正面顔を検出しない場合であってもバックライトをオフにしない(421、423)。斜め顔(405)または非顔を検出してバックライトをオフにしても(407)、入力デバイスが操作されたとき(409)はバックライトをオンにする(431)。そのとき、一定時間以上連続して正面顔を認識しない限りディスプレイのオン状態を維持する(433)。バックライトがオフになってから正面顔を検出したときはバックライトを点灯する(411)。
(もっと読む)
姿勢推定装置、姿勢推定方法及び姿勢推定プログラム

【課題】2次元の関節位置の安定した推定を行い、それに伴って3次元の姿勢推定の精度の向上を実現することができる姿勢推定装置を提供する。
【解決手段】3次元動作モデルデータを参照して、追跡対象について、初期の位置候補を複数設定する手段と、入力した画像から、追跡対象の位置候補における特徴量を算出し、該特徴量をテンプレート記憶手段に記憶されたテンプレートデータと比較した結果得られる類似度の重みに基づき、追跡対象の位置を推定し、追跡対象の位置の推定情報を出力する手段と、類似度の重みと、3次元動作モデルデータに基づき、追跡対象の位置候補を改めて設定する手段と、追跡対象の位置の推定と、追跡対象の位置候補の設定とを複数回数繰り返すことにより、追跡対象の位置を追跡する手段と、追跡対象の位置の推定情報と、3次元動作モデルデータを参照して、姿勢推定対象の3次元姿勢を推定する手段とを備えた。
(もっと読む)
画像認識装置
【課題】本発明は、ハードウェアの規模を小さくでき、ニューロ演算を用いた画像認識処理をリアルタイムで実行することができる技術を提供することを課題とする。
【解決手段】画像認識装置100は、車載カメラが撮影した動画像データのフレーム30Fに歩行者が撮影されているか否かを判定する。前処理部2は、フレームの中から検出ブロックを決定し、フレームから検出ブロックに対応するブロック画像データを切り出す。ブロック画像データから、検出ブロックのサイズよりも小さい所定サイズのブロックデータ33が作成される。ニューロ演算部4は、ブロックデータ33をニューロ演算して出力シナプス34を算出する。後処理部6は、出力シナプス34に基づいて、検出ブロック内に歩行者がいるか否かを判定する。後処理部6は、歩行者が検出された場合、歩行者が検出された検出ブロックをフレーム30Fの上に重ねた結果データ35を作成する。
(もっと読む)
学習装置および方法、並びにプログラム
【課題】より高速に高精度な識別器を得ることができるようにする。
【解決手段】特徴量計算部は、学習画像の各特徴点から特徴量を抽出する。取得部は、既に学習により得られた識別器を転移識別器として取得する。識別器生成部は、転移識別器を構成する弱識別器に特徴量を代入し、それらの弱識別器の識別結果と学習画像の重みとに基づいて弱識別器の誤り率を算出するとともに、誤り率が最小となる弱識別器を選択する処理を複数回、繰り返し行う。また、識別器生成部は、選択した複数の弱識別器を線形結合することで、検出対象を検出するための識別器を生成する。本発明は、学習装置に適用することができる。
(もっと読む)
シーンにおけるオブジェクトを分類する方法
【課題】オブジェクト分類は、3D距離データ用の正確な分類方法が必要であり、オブジェクトを分類する方法を提供する。
【解決手段】移動するオブジェクトが、1組の1つ又は複数の1次元レーザーラインスキャナーを備えたスキャナーによって取得された距離データの最大マージン分類及び識別確率的逐次モデリングに基づいて分類される。2次元画像の形態での距離データは、前処理され、その後分類される。分類器は、外観分類器と、種々の推論技法を用いる系列分類器と、オブジェクトの構造の状態機械実施とから構成される。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法
【課題】認識処理を軽減することを目的とする。
【解決手段】第一の撮像手段で撮像された画像を取得する取得手段と、取得手段で取得された画像から物体領域を検知する検知手段と、画像中の第一の撮像手段と第二の撮像手段との共有領域に、検知手段で検知された物体領域がある場合、共有領域の物体認識処理を画像処理装置で行うか、第二の画像処理装置で行うか否かを判断する判断手段と、判断手段において画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲に設定し、判断手段で第二の画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲から共有領域を除いた領域に設定する設定手段と、設定手段で設定された物体認識範囲に物体が写っているか否か物体認識を行う認識手段と、を有する。
(もっと読む)
環境制御システムおよび環境制御プログラム
【課題】 人の眼の順応を考慮して、最適な環境制御を行うこと。
【解決手段】 所定の環境における光環境に影響を与える装置と、装置を制御する制御装置とからなる環境制御システムであって、制御装置は、所定の環境における輝度情報に基づいて、輝度画像を取得する取得手段と、輝度画像に基づいて、環境における人の知覚の程度を表す見え方画像を生成する生成手段と、見え方画像に基づいて、環境における見え方の適切さを示す指標を算出する算出手段と、指標の値と予め定められた目標値とを比較することにより見え方の適切さ評価を行い、評価結果に基づいて装置を制御することにより、光環境を制御する制御手段とを備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】物体認識において使用されている認識手法をユーザに簡易にフィードバックする。
【解決手段】入力画像を取得する画像取得部と、複数の認識手法から上記入力画像に映る物体の認識手法を選択する選択部と、上記選択部により選択される認識手法を用いて、上記入力画像に映る物体を認識する認識部と、上記認識部により認識される物体と関連付けられる仮想オブジェクトを上記入力画像に重畳して表示する表示制御部と、を備え、上記表示制御部は、上記選択部により選択される認識手法に応じて、上記仮想オブジェクトの表示を変化させる、画像処理装置が提供される。
(もっと読む)
地物選定システム、地物選定プログラム及び地物選定方法
【課題】画像認識を実施する時点における日照の状況も効果的に反映して、予め存在が把握されている複数の地物の中から画像認識の対象とする対象地物を選定する。
【解決手段】所定範囲内に存在する複数の候補地物についての地物情報である候補地物情報を取得し、日陰と日向とのコントラストを示すコントラスト情報を取得し、候補地物情報と日時情報とに基づいて、候補地物のそれぞれについて、候補地物と日陰との関係を示す情報である地物日陰情報を演算し、地物日陰情報とコントラスト情報とを含む日照要因情報に基づいて、候補地物の中から対象地物を選定する。
(もっと読む)
感覚データ識別装置及びプログラム
【課題】感覚データに対する識別性能を向上させることができるようにする。
【解決手段】画像脳信号記憶部20に、画像データを表示したときに被験者の脳の各計測点で計測された脳波信号を表わす脳活動データと、当該画像データとのペアを複数記憶する。画像特徴量学習部22によって、画像脳信号記憶部20に記憶された脳活動データ及び画像データの複数ペアに対して、カーネル正準相関分析を行って、脳活動データと画像データとの相関が高くなるように、カーネル関数の線形和で表わされる正準相関変数における重みを学習する。そして、学習された重みを用いた画像側の正準相関変数を、画像特徴量とする。
(もっと読む)
進化的条件判断ネットワーク
【課題】条件判断木(決定木)を発展させた条件判断ネットワークを進化計算により最適化する方法に関する。
【解決手段】参照ブロック画像判定の経路が、ノード1、ノード3、ノード4、ノード6となった場合に、対象ブロック画像判定のノード4では、参照ブロック画像経路と重複するので、初期値である標準閾値に代えて作用閾値を用いて、対象ブロック画像の特徴量である中央値につき条件判断する。ノード5では、参照ブロック画像経路と重複しないので、初期値である標準閾値を用いて、対象ブロック画像の最頻値につき条件判断する。そして、終端で評価値を特定する。この条件判断ネットワークを進化計算アルゴリズムにより学習する。
(もっと読む)
情報処理装置、およびその処理方法
【課題】画像データ中のサンプリングデータを用いて、高速に特定のパターンの識別を行い、種々の変動に対しても高速に識別を行う情報処理装置およびその方法を提供する。
【解決手段】画像処理装置は、画像における少なくとも1つの特定パターンに関して判定のための情報を登録し、画像データを入力し、入力した画像データから所定の特徴の分布を抽出し、特徴の分布を示す第1特徴分布マップを生成し、第1特徴分布マップの局在性を緩和させる変換を第1特徴分布マップに適用して第2特徴分布マップを生成し、第2特徴分布マップ上のサンプリングデータと登録された情報とを用いて、画像データが前記特定パターンのうちいずれのパターンかを判定する。
(もっと読む)
情報処理装置および方法、並びにプログラム
【課題】処理速度、制度を向上させた画像認識を行う。
【解決手段】識別器を構成する複数の弱識別器を最適な配列とするために、各弱識別器にサンプル学習画像を処理させたときのスコアが取得される。ポジティブ画像が処理されたときのスコアのうち、最小値のスコアが抽出され、その最小値のスコアよりもさらに小さいネガティブ画像が処理されたときのスコアの数が数えられる。その数が多い順に、弱識別器が配置される。弱識別器の並び替えが行われることにより識別器が生成され、この識別器は、演算が早い段階で打ち切られる特徴を有する。本発明は、画像から対象物を認識する認識装置や認識装置のための学習を行う学習装置に適用できる。
(もっと読む)
画像分離装置、画像分離方法および画像分離プログラム
【課題】ユーザの作業負荷および作業時間を軽減しつつ、画像の前景と背景を適切に分離する。
【解決手段】画像を前景と背景に分離するための画像分離装置であって、画像を入力し、記憶手段に記憶するデータ入力手段と、前景および背景の画像濃淡値(または輝度)をIとした場合、Fを前景の画像濃淡値、Bは背景の画像濃淡値、αは、αブレンディングに関する小数として、所定の拘束条件下で目的関数を最小化し、未知数α、F、Bを画素単位に取得し、画素単位に取得したFおよびBの画像濃淡値を用いて、当該画素が前景の画素であるか、背景の画素であるかを判別し、前景と背景とを分離する分離手段と、前記分離した背景と前景とをそれぞれ表示する表示手段と、を有する。
(もっと読む)
横断歩道検出装置、横断歩道検出システム,横断歩道検出方法及びプログラム
【課題】道路の状況にかかわらず、横断歩道を精度良く検出する。
【解決手段】メインパターンを用いたスキャン動作によって得られたデータに所定の演算処理を実行する。次に、この演算処理の演算結果と、メインパターンMPの所定の画像上の位置との関係を示す特性曲線を算出する。そして、特性曲線に現れるピークの規則性に基づいて、所定の画像に横断歩道が写っているか否を判断する。上述のデータは、メインパターンを構成するサブパターンそれぞれと重なる画素の輝度の平均である。このため、横断歩道を構成する白色パターンに亀裂が生じていたり、白色パターンに剥離が生じていたりしても、データの値は、ほとんど影響を受けない。したがって、所定の画像に横断歩道が写っているか否かを精度よく判断することができる。
(もっと読む)
視差推定装置およびそのプログラム
【課題】本発明は、視差の推定精度の低下を抑制する視差推定装置を提供する。
【解決手段】視差推定装置1は、正規化相互相関で算出した類似度にコサイン逆関数を適用して第1の重み係数を乗じた誤差関数を用いてデータ項を生成するデータ項生成手段11と、スムーズ項生成手段12と、ブロック間でメッセージを伝搬するメッセージ伝搬手段13と、視差候補決定手段14と、正規化相互相関で算出した類似度にコサイン逆関数を適用して第1の重み係数より大きな第2の重み係数を乗じた誤差関数を用いてデータ項を生成するデータ項生成手段21と、スムーズ項生成手段22と、画素間でメッセージを伝搬するメッセージ伝搬手段23と、メッセージ伝搬手段23が更新した下位階層におけるエネルギーが最小となる視差であって、視差候補決定手段14から入力された視差候補に含まれる視差を視差情報として決定する視差決定手段24と、を備える。
(もっと読む)
物体識別装置、物体識別方法、及びプログラム
【課題】 識別対象物体の識別精度を向上することを目的とする。
【解決手段】 入力画像内の物体を識別する物体識別装置であって、入力画像から予め定められたサイズの複数の部分画像を分割して生成する生成部と、生成部により生成されたすべて各部分画像について各部分画像間の非類似度を算出する第1算出部と、第1算出部により算出された非類似度に基づいて、物体の特徴領域として物体の部位領域及び部位領域以外の領域である模様領域を検出する検出部と、検出部により検出された特徴領域に対する特徴量のヒストグラムを作成する作成部と、作成部により作成されたヒストグラムから、部分画像が部位領域であるか模様領域であるかを識別するための弱仮説を設定する設定部と、設定部により設定された弱仮説から、物体の部位を識別するための識別情報を算出する第2算出部と、識別情報に基づいて入力画像内における物体を識別する識別部と、を備える。
(もっと読む)
データ補正装置及び方法
【課題】対象物体が大きな変動を有する場合であっても特徴点の位置の誤りや画像データの欠損を適切に補正する画像処理装置及び方法を提供する。
【解決手段】対象物の画像に関わるデータを補正するデータ補正装置は、補正対象のデータを連結したベクトルデータを部分空間へ射影して次元削減された射影ベクトルを生成し、その射影ベクトルの次元を復元して次元復元されたベクトルデータを生成する次元復元処理とを実行することにより、複数の次元復元されたベクトルデータを変動の種類毎に生成する。そして、データ補正装置は、射影ベクトルに基づいて対象物の変動を判定し、その判定結果に基づいて上記複数の次元復元されたベクトルデータを統合して補正後のデータとして出力する。
(もっと読む)
視聴覚を結合した動作認識システムおよびその認識方法
【課題】本発明は、視聴覚を結合した動作認識システムおよびその認識方法を開示する。
【解決手段】このシステムは、データ解析モジュールと、データベースと、計算モジュールとを備える。データベースは、多種の異なる視聴覚関係モジュールを格納し、各視聴覚関係モジュールは、特徴取り込みパラメータと、視聴覚関係パラメータとを含む。データ解析モジュールは、対応するジェスチャ画像および音声データを取得し、各特徴取り込みパラメータに導入し、各視聴覚関係モジュールに対応する画像特徴配列および音声特徴配列を形成する。データ解析モジュールは、さらに各視聴覚関係パラメータを利用して、複数の視聴覚ステータスパラメータを計算する。計算モジュールは、さらに視聴覚ステータスパラメータ、画像特徴配列および音声特徴配列を利用し、各視聴覚関係パラメータに対応する認識確率を計算し、その中から最大値のものを取り出し、標的パラメータとする。
(もっと読む)
参照オブジェクトに対するクエリオブジェクトの類似性を評価するための方法およびシステム
本発明は、D次元のデータ空間内のテストデータのクラスを評価するための方法およびシステムに関し、D≧3であり、各データはいくつかのデータをまとめる少なくとも1つのクラスに属する。
この方法は、データ空間の参照データ一式をQ次元の空間内に射影するステップを含み、Q<Dであり、各参照データのクラスは知られている。
この方法は、参照データのそれぞれに対するテストデータの類似性の測定を計算するステップも含む。
この方法は、それぞれが唯一の参照データの射影を含む、複数のばらばらの領域に射影空間を区分化するステップも含む。
この方法は、テストデータのクラスを評価するステップを最後に含み、このクラスは、類似性測定の点でテストデータに最も近い参照データを含む領域の1つに含まれる参照データの1つと同じクラスであるものとして評価される。
実際に、これらの領域はテストデータの射影を含む可能性が最もある領域である。
用途:弁別における決定エイド、形状認識、異常検出
(もっと読む)
1 - 20 / 50
[ Back to top ]