
Fターム[5L096MA05]の内容
Fターム[5L096MA05]に分類される特許
1 - 20 / 26
物体判別方法
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
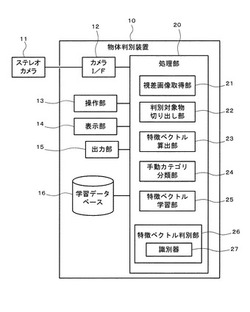
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
個体識別システム、個体識別方法、及びプログラム

【課題】 タガントを利用して対象物の個体識別を行うシステムにおいて、個体識別の精度を向上させる。
【解決手段】 複数種類の色または形状が混在したタガントを物品に付与する。コンピュータ4は対象物2の画像データ20を読み取り、画像認識処理により各タガントの分布位置情報を含む複数の特徴量を抽出し、特徴量テーブル6を生成してデータベース5に登録する。例えば、タガントの形状、色、回転角度情報を特徴量とする。識別対象とする物品の画像データ20’からも同様の画像処理手法で各タガントの分布位置情報を含む複数の特徴量を抽出し、特徴量テーブル6’を生成し、登録されている特徴量テーブル6と照合することにより、識別対象とする対象物の個体を識別し、結果を提示する。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】対象画像を分割して得られるブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】予め設定されたカテゴリごとに予め学習済みの分離平面を用いて対象画像を分割して得られるブロック画像をカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、対象画像を複数のブロックに分割して複数のブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、特徴量空間におけるブロック画像の特徴量の大きさに対応する座標位置及び分離平面を用いて、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13と、を備え、特徴量演算部12は、ブロック画像の特徴量として、当該ブロック画像の画像情報から算出される局所的特徴量及び対象画像全体の画像情報から算出される全体特徴量を用いる。
(もっと読む)
画像識別装置及びプログラム
【課題】横向き二輪車を表わす画像を精度よく識別することができるようにする。
【解決手段】ウィンドウ画像抽出部22は、ウィンドウ画像を抽出して上下に分割する。セル特徴量計算部24は、ウィンドウ画像の各セルについて勾配ヒストグラムを計算する。上部ブロック設定部26は、ウィンドウ画像の上部に、連続する所定個のセルからなるブロックを走査し、上部特徴ベクトル算出部28は、各ブロックの勾配ヒストグラムから、画像特徴ベクトルを算出する。下部ブロック設定部30は、ウィンドウ画像の下部に、左右対称に位置する所定個のセルからなるブロックを走査し、下部特徴ベクトル算出部32は、各ブロックの勾配ヒストグラムから、画像特徴ベクトルを算出する。識別部36は、算出された上部及び下部の画像特徴ベクトルに基づいて、乗員ありの横向き二輪車を表わす画像であるか否かを識別する。
(もっと読む)
画像処理装置とその方法
【課題】処理画像で選択された注目画素の近傍画素についての増分符号算出の方向を限定することにより、出現確率のテーブルのサイズを削減し、必要なメモリ容量を削減する。
【解決手段】画像処理装置は、処理画像から注目画素を選択し、注目画素から所定範囲内に存在する複数の近傍画素の各々とを比較し輝度値の差を算出する輝度値差算出手段と、輝度値差算出手段により算出された輝度値の差と注目画素と複数の近傍画素の各々との相対的位置関係とに基づいて特徴量を算出し特徴量画像を生成する特徴量生成手段とを備え、輝度値差算出手段が、注目画素に関して互いに点対称の位置にある2つの近傍画素については、いずれか一方の近傍画素に関して注目画素との差を算出する。
(もっと読む)
画像認識システム、方法、及び、プログラム
【課題】処理量で、対称線分図形を検出することができる画像認識システムを提供する。
【解決手段】検出対象の対称線分図形は、左右対称であり、垂直線分対と斜線分対とを有する。垂直線分対検出手段22は、対称線分図形を含む入力画像から、垂直線分対上を通る一対の垂直線を検出する。中央線検出手段23は、検出された一対の垂直線の中央を通る中央線を検出する。対称斜線分対検出手段24は、検出された中央線上の切片をパラメータの1つとした直線パラメータ表現に基づき、入力画像から、斜線分対上を通る一対の斜線を検出する。判定手段25は、入力画像における、検出された一対の垂直線及び斜線の周囲に対応する領域内の画素と、周囲外の領域の画素とに基づいて、対称線分図形の存在の有無を判定する。
(もっと読む)
物体認識装置、物体認識方法及びプログラム
【課題】画像認識に必要な計算量及びメモリー容量を低減し、かつ一部が重なり合った複数の認識対象物体の検出処理を行うことが可能な画像認識装置を提供する。
【解決手段】本発明の物体認識装置は、登録画像の点対称変換された画像より抽出した複数の第1の特徴点、変換画像の基準点から第1の特徴点への変位ベクトルが記憶される特徴点データ記憶部と、入力画像の認識対象物体の特徴を構成する第2の特徴点を抽出する特徴点抽出部と、第2の特徴点を回転中心として、変位ベクトルを単位角度にて順次回転させ、第2の特徴点と変位ベクトルとから候補座標点を算出する候補座標点算出部と、候補座標点を複数の座標軸に投影し、投影軸座標点に対し、変位ベクトルの回転角に対応させて投票を行う候補座標点投票部と、座標軸における投票における積算値の最大値の軸座標を基準点とする認識対象物体判定部とを有する。
(もっと読む)
画像検索装置およびその方法
【課題】幾何的に対称な部分が存在する画像の検索に関して、類似する特徴点の組み合わせを適切にし、無為に対応点候補個数を増やすことなく検索することを可能にする。
【解決手段】画像検索装置は、クエリ画像より互いに対応する特徴点の対を取得し、取得された特徴点の対に基づいて対称性を有する部分画像を抽出し、部分画像をその対称軸で分割して得られる2つの部分領域のそれぞれを、当該部分画像における画像特徴の傾向に基づいて第1領域と第2領域に決定する。クエリ画像と比較先画像の類似性の判定においては、両画像の第1領域に決定されている部分領域から抽出された特徴点の対に基づいて座標変換処理のための座標変換係数が設定され、当該両画像の第1領域以外の領域を含む領域から抽出された特徴点の対に対して上記座標変換係数を用いた座標変換処理を適用して、座標変換処理後の特徴点の対の座標が比較される。
(もっと読む)
車両認識装置及びプログラム
【課題】道路を通行する車両を撮影した画像から、当該車両の車体部分の領域を認識する新たな手法を提供する。
【解決手段】S112では、車両の画像のエッジ画像に対し、各帯の向きを道路の通行方向に直交する向きに傾けた帯状領域を複数並べる。S114では、帯状領域においてエッジ強度が所定値以上のものを含む範囲に対応する車両画像の範囲である車体検索範囲内に、車両画像を撮影したカメラと車両との撮影時の位置関係に基づき帯方向の長さを個々に設定した複数の矩形枠を並べる。S115では、該車体検索範囲内の位置に対称中心線を仮定したときにおける各枠内の領域の画像についての、該対称中心線の位置に対する線対称性の高さを、各枠内の領域の輝度値に基づき判定する。S116では、各枠内の領域の画像についての線対称性の高さに基づき、車体の領域を車両画像から抽出する。
(もっと読む)
画像監視装置
【課題】通話機を持つ手の誤検出を減じて高精度に通話姿勢を検知できる画像監視装置の提供。
【解決手段】人物の通話姿勢を検知すると異常出力する画像監視装置1は、人物の顔とその周辺を撮像して監視画像を出力する撮像部2と、監視画像から予め設定された顔特徴を有する顔領域を検出する顔検出手段52と、顔検出手段52により検出された顔領域の左右周辺の当該顔領域に対して左右対称な位置に探索領域を設定する探索領域設定手段53と、監視画像内で左右の探索領域間の類似性を判定する類似性判定手段55と、類似性が判定されない場合に人物の通話姿勢を検知する通話姿勢検知手段56を備える。こうして通話機を持つ手の存在により顔の左右の探索領域の画像が類似しなくなることを判定することで、通話姿勢を検知できる。
(もっと読む)
車両運転支援装置および車両運転支援方法
【課題】自車両の前端部に対する左右の側方の領域の状況を簡便かつ適切に確認することができる「車両運転支援装置および車両運転支援方法」を提供することを目的とするものである。
【解決手段】車載カメラ11の撮影映像3に含まれる物体に対する車両の姿勢を検出する姿勢検出装置17と、この姿勢検出装置17の検出結果に基づいて、車両の姿勢にかかわらずに状況確認に必要とみなされる領域を含み、物体の角度が表示状態において互いに左右対称となるような第1の画像1および第2の画像2を生成する画像生成装置18と、この画像生成装置18によって生成された画像1,2を合成して表示部14に表示する画像合成装置20とを備えたこと。
(もっと読む)
人物検出装置及びプログラム
【課題】人物の検出の精度を向上させることができる人物検出装置及びプログラムを提供することを目的とする。
【解決手段】入力画像から抽出したウインドウ画像を左右の領域に分割して左半分画像及び右半分画像を生成し、左半分画像と左半分画像用の学習モデルとの比較、右半分画像と右半分画像用の学習モデルとの比較、全体画像と全体画像用の学習モデルとの比較を行い、左半分画像、右半分画像、及び全体画像のいずれか1つの画像が人物であると判定された場合に、ウインドウ画像が人物であると判定することにより、入力画像から人物を検出する。
(もっと読む)
有糸分裂像検出装置および計数システム、および有糸分裂像を検出して計数する方法
少なくとも1つの染料で染色された生検標本の画像内の有糸分裂像を検出して計数する方法およびシステムは、画像をコンピュータ処理で色濾過し、該画像内の有糸分裂像を示す有色の画素を特定すること、画像内の互いに連結された有糸分裂の画素をコンピュータ処理で抽出し、それによって有糸分裂の画素の塊を生成すること、有糸分裂の画素の塊をコンピュータ処理で形状濾過および群化して、有糸分裂像の候補を生成すること、塊の位置で生検標本画像をトリミングすることによって、有糸分裂像のサブ画像を抽出すること、有糸分裂像の候補から2つの特徴群を2つの個別のコンピュータ処理で抽出すること、抽出された2つの特徴群に基づいて、有糸分裂像の候補のどれが有糸分裂像かをコンピュータ分類処理で決定すること、生検標本組織の平方単位当たりの有糸分裂像の数を計数すること、を含む。 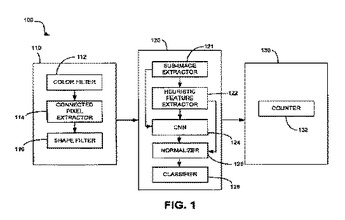 (もっと読む)
(もっと読む)
車両認識装置、車両、及び車両認識用プログラム
【課題】周辺に複数の車両が存在する場合でも、画像に撮像された複数の車両を区別して、車両を適切に認識することができる車両認識装置、車両、及び車両認識用プログラムを提供する。
【解決手段】車両認識装置10は、撮像手段2を介して取得された画像から、画素値が所定範囲となる画素からなる領域を特徴領域として抽出する特徴領域抽出手段12と、抽出された特徴領域のうち、画像上で水平方向に並んでいる第1及び第2の特徴領域を特定するペアリング手段13と、第1の特徴領域の上下又は第2の特徴領域方向の周辺域で第1の判定領域を設定すると共に、第1及び第2の特徴領域の中心線に対して第1の判定領域と線対称の位置に第2の判定領域を設定する判定領域設定手段14と、第1及び第2の判定領域との相関の度合が高い場合に、第1及び第2の特徴領域が1台の他の車両の画像部分であると判定する特徴領域判定手段15とを備える。
(もっと読む)
輪郭検出方法、輪郭検出装置および輪郭検出プログラム
【課題】高精度かつ処理負荷の少ない輪郭検出を行う。
【解決手段】左目の輪郭が検出できると、最終的に探索された輪郭パラメータL,R,T,BをRAM12に記憶し、引き続き右目の輪郭検出を実行する。パラメータ探索部P2c5は、右目のZマップにおいて目の輪郭パラメータL,R,T,Bを初期設定する。ここでは、RAM12から左目の輪郭を示す輪郭パラメータL,R,T,Bの座標を読み出し、右目の輪郭線Oが左目の輪郭線Oに対して、中央の鉛直線に関し左右対称となるように右目の輪郭パラメータL,R,T,Bを初期設定する。
(もっと読む)
顔中心線検出装置
【課題】 より正確な中心線を検出することができる顔中心線検出装置を提供する。
【解決手段】 顔中心線検出装置1は、濃淡画像を入力され該濃淡画像から顔を含む顔画像を抽出する顔画像抽出部11と、顔画像抽出部11によって抽出された顔画像の各画素の画素値を該画素の位置での濃度勾配の向き(濃度勾配方向)に応じた数値に置き換えた濃度勾配画像を生成する濃度勾配画像生成部12と、濃度勾配画像生成部12が生成した濃度勾配画像を用いて顔画像の中心線を検出する中心線検出部13とを備える。エッジよりも情報量の多い濃度勾配方向を用いていることにより、エッジを用いる場合に比べてより正確な中心線を得ることができる。
(もっと読む)
検出方法
【課題】特に自動車に配置された撮像デバイスの視界範囲内の環境の画像内の、好ましくは道路に関連する既知の形状の、特に道路標識の対称物体を検出する方法を提供すること。
【解決手段】撮像デバイスによって画像が撮像され、画素またはその一部を含み、そのつどプリセットされた対称度を超える少なくとも1つの画像領域が、撮像された撮像内、または撮像された画像から画像処理によって生成された画像内で判定され、それぞれの関連する画像部分が後の形状認識のために、少なくとも1つの画像領域またはその一部に関連して判定され、そのつど対称物体の潜像を検出するために、形状認識が少なくとも1つの関連画像部分だけで実行される。
(もっと読む)
自動セグメント化方法及び装置
【課題】疑わしい塊の正確で閉じた輪郭を提供する動的プログラミング・アルゴリズムを用いて組織領域の塊を表す画像を自動的にセグメント化する。
【解決手段】塊の正確で閉じた輪郭を保証する動的プログラミングに基づいて組織領域の塊を表す画像の自動セグメント化方法および装置を開示する。一実施形態の方法は、組織領域の塊を含んだ画像を表すデジタル画像データにアクセスし、該デジタル画像データの鏡像を生成し、塊を含む鏡像の一部を含む対象領域(ROI)を抽出し、該ROIを極性空間に変換して該ROIの極性画像を取得し、該極性画像の下位部分にローカル・コストを割り当て、該割り当てられたローカル・コストに基づいて塊の輪郭を見つけ出す。
(もっと読む)
視線方向推定装置及び視線方向推定方法
【課題】車両運転者の目の向きを特定できない場合でも、車両運転者の視線方向を推定できるようにする。
【解決手段】シーンモデルデータベース5に運転者ごと、運転シーンごとのシーンモデルを格納しておく。視線方向推定処理部6は、個人認証処理部3による認証結果と運転シーン推定処理部4による推定結果とに基づいて、シーンモデルデータベース5に格納されている各種シーンモデルの中から現在の運転シーンに対応した車両運転者のシーンモデルを特定し、顔向き推定処理部2による推定結果をこのシーンモデルと照合することで、車両運転者の視線方向を推定する。
(もっと読む)
1 - 20 / 26
[ Back to top ]